ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
ТИП II. МЕХАНИЗМ ИГЛЫ МАШИНЫ ЗИГЗАГООБРАЗНОЙ СТРОЧКИ
В курсовом проекте необходимо выполнить анализ работы механизма иглы зигзагообразной строчки и спроектировать профиль кулачка по заданному виду строчки.
2.1. Исходные данные
Игла в машинах зигзагообразной строчки приводится в движение от двух механизмов:
- механизма вертикальных перемещений (рис. 2.1);
- механизма отклонения иглы (рис. 2.2).
Механизм вертикальных перемещений иглы содержит кривошип ОА, закрепленный на главном валу 0, шатун АВ, игловодитель 1, иглу 2.
Игловодитель вставлен в рамку 3, которая может отклоняться в направлении поперек линии строчки.
Заданы следующие параметры: lOA = r = 18 мм; lAB = l = 44 мм; l1 = 129 мм (расстояние от точки В соединения игловодителя с шатуном до точки С - острия иглы); l = 178 мм (расстояние от главного вала до верхнего уровня


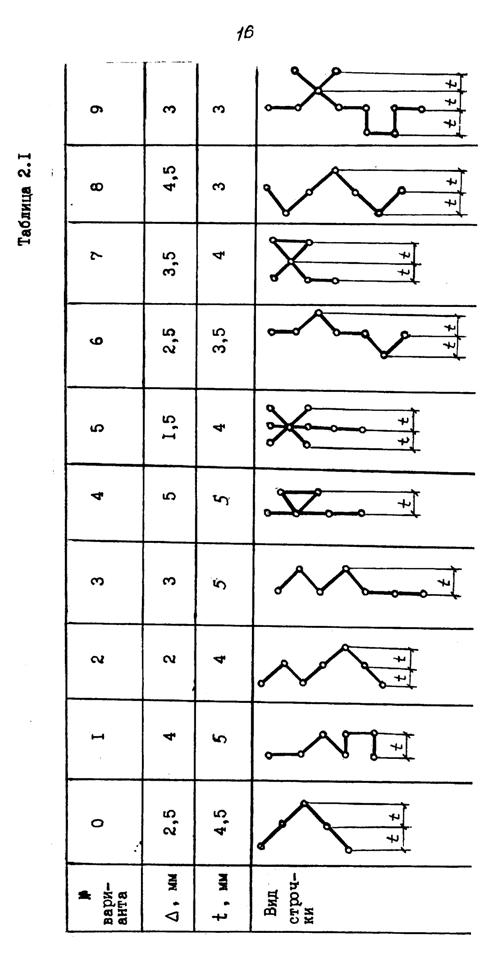
игольной пластинки); D - толщина сшиваемых материалов. Последний параметр переменный и выбирается из таблицы 2.1 в соответствии с заданным вариантом.
Механизм отклонения иглы (рис. 2.2) состоит из главного вала 1, червяка 2, червячного колеса 3, промежуточного вала 01, на котором крепится кулачок 4. Последний имеет паз, в который вставлен ролик 5, соединенный с толкателем 02N. Толкатель через шатун GK, коромысла 02G, 03F, шатун FE связан с рамкой игловодителя 04Е.
Заданы следующие параметры и размеры механизма: i = 12 (передаточное отношение червячной пары), Rmin = 40 мм (минимальный радиус кулачка); RР = 5 мм (радиус ролика); координаты опор: х02 = -40 мм; у02 = -40 мм; х03 = -101 мм; у03 = 3 мм; х04 = -205 мм; у04 = 100 мм. Длины звеньев: 02N = 42 мм; 02К = 20 мм; GК = 58 мм; 02G = 20 мм; 03F = 25 мм; EF = 106 мм; 04E = 145 мм; d = 10°; 04D = l3 - D (l3 см. на рис. 2.1).
Вид строчки и величина отклонения иглы выбираются в соответствии с вариантом из таблицы 2.1.
2.2. Содержание и методика выполнения проекта
Проект состоит из расчетно-пояснительной записки и графической части. Расчетно-пояснительная записка включает в себя следующие разделы:
- введение;
- анализ работы механизма вертикальных перемещений иглы;
- проектирование механизма отклонения иглы по заданному виду строчки;
- кинематическая схема механизмов машины;
- выводы;
В разделе "ВВЕДЕНИЕ" необходимо четко определить цель, поставленную в курсовом проекте, и привести все исходные данные для выполнения проекта (схемы, размеры звеньев, координаты опор).
В разделе "АНАЛИЗ РАБОТЫ МЕХАНИЗМА ВЕРТИКАЛЬНЫХ ПЕРЕМЕЩЕНИЙ ИГЛЫ" необходимо построить диаграмму перемещения иглы (точка С).
Эта задача может быть решена графическим или аналитическим способами.
В графическом способе используется метод засечек. За исходное принимается крайнее нижнее положение иглы. Положение кривошипа ОА (рис. 2.1) следует изменять через каждые 30°, таким образом график перемещения иглы строится по 12-ти точкам (в пределах от 0 до 2p). Углы откладываются по оси (рис. 2.3а), которая совпадает с уровнем игольной пластины.
Перемещение иглы в зависимости от угла поворота главного вала можно определить аналитически по формуле

 ,
,
где r - длина кривошипа ОА;
l - длина шатуна АВ;
j - текущее значение угла поворота главного вала, которое изменяется в пределах от 0 до 360° через каждые 30°. Значения следует откладывать в системе координат Z¢0j¢ (рис. 2.3а).
Полученные графики необходимо сравнить. Отложить значение D (толщина материала). Точка "а" соответствует выходу иглы из материала, а точка «в» -входу.
Далее по графику перемещения определяются углы jВХ, jВЫХ, jХ, jХ¢.
jВХ – угол, соответствующий входу иглы в материал;
jВЫХ – угол, соответствующий выходу иглы из материала;
jХ - угол, соответствующий холостому ходу иглы, т.е. нахождению иглы вне материала;
jХ¢ - угол поворота главного вала, в течение которого игла может отклоняться, т.к. она находится вне материала
jХ¢ = 0,8×jХ.
Это равенство учитывает возможность увеличения толщины сшиваемых материалов D и позволяет избежать поломки иглы.
Под графиком перемещения иглы следует построить диаграмму механизма отклонения иглы (рис. 2.36). На диаграмме выстой показан прямой линией, параллельной оси 0j, а отклонение - наклонной.
Раздел "ПРОЕКТИРОВАНИЕ МЕХАНИЗМА ОТКЛОНЕНИЯ ИГЛЫ" включает в себя решение задачи по определению профиля кулачка 4 (рис. 2.2).
Прежде всего необходимо проанализировать строчку, предложенную по варианту задания (табл. 2.1).
Для примера проанализируем строчку, выполненную в виде прямоугольного зигзага (рис. 2.4).
Стежок I образуется за счет отклонения иглы из крайнего левого положения (прокол 1) в крайнее правое (прокол 2) при неподвижном материале (т.е. рейка не перемещает ткань).
Стежок II выполняется без отклонения иглы (игла находится в крайнем правом положении), а рейка должна переместить материал на величину стежка S1.
Стежок III образуется при отклонении иглы из крайнего правого положения (прокол 3) в крайнее левое (прокол 4) без продвижения материала.
Стежок IV образуется без отклонения иглы, но при продвижении материала на величину S2. Далее процесс образования строчки повторяется.
Примечание: при построении контура строчки по размерам (в масштабе) перемещениями ткани следует задаваться самостоятельно в пределах 0£Si£5 мм.
Вид строчки позволяет выделить в ней законченный повторяющийся элемент (цикл).
Для нашего примера этот цикл состоит из стежков I, II, III, IV. Его принято называть раппортом Р строчки и он оценивается количеством стежков в цикле. Для нашего случая Р = 4.
Между раппортом строчки Р и передаточным отношением червячной пары существует соотношение
i = К×Р,
где К - целое число.
Число К указывает, сколько раз раппорт строчки повторяется за один кинематический цикл работы машины, который равен одному полному обороту кулачка или 12-ти оборотам главного вала (i = 12).
Т = 12 × 2p
Для рассматриваемого случая К = 3, т.е. раппорт строчки повторится три раза за один поворот кулачка.
На рис. 2.4. представлены тактограммы работы механизмов поперечных отклонений иглы и перемещений материала для одного раппорта строчки, который образуется за четыре оборота главного вала (8p). А весь кинематический цикл происходит за 24p, т.е. тактограмма повторяется еще два раза.
Тактограмма отклонения иглы (рис. 2.4а) на каждом участке строится в соответствии с рекомендациями и характером образования стежков в строчке. Так, стежки I и III выполняются с отклонением иглы, что показано на рисунке наклонными линиями вс, de. Характер наклона каждой линии указывает на направление отклонения иглы. Стежки II и IV выполняются без отклонения иглы, о чем говорит отсутствие наклонных участков.
Аналогично стежкам I и III будут выполняться стежки V, VII, IX, XI; а стежкам II и IV будут соответствовать стежки VI, ХIII, X, ХII. Тактограмма перемещений материала (рис. 2.46) строится подобным образом с учетом того, что перемещение материала будет происходить в период выполнения стежков II, IV, VI, VIII, X, ХII.
Далее следует определить максимальное отклонение центра ролика lN по заданной величине отклонения иглы t.
Для решения этой задачи можно применить графический метод засечек, зная размеры всех звеньев и координаты опор механизма отклонения иглы.
Если принять условия, что перемещения звеньев достаточно малы, а сами звенья механизма абсолютно жесткие, то можно применить расчетный метод.
Определяем перемещение точки Е (рис. 2.2) из следующей пропорции

Перемещение точки F будет равно перемещению точки Е, т.к. эти точки принадлежат одному звену
lF = lE.
Определяем перемещение точки G.


Перемещение точки К будет таким же, как и перемещение точки G
 .
.
Определяем перемещение точки N.

Значения lN используются при определении радиусов кулачка.
Следующий этап - определение минимального радиуса кулачка Rn, который соответствует крайнему правому проколу иглы. Для решения этой задачи необходимо по виду выполняемой строчки и заданному отклонению иглы t методом засечек построить крайнее правое положение механизма отклонения иглы (рис. 2.2). Определить расстояние O1N это и будет искомый радиус Rn. При этом, если Rn<Rmin = 40 мм, то нужно изменить угол d таким образом, чтобы Rn = 40 мм.
Далее необходимо приступить к построению профиля кулачка. Эта задача решается графическим способом. Профиль определяется только для механизма отклонения иглы с учетом тактограммы t = t (j) (рис. 2.4а). Тактограмма S = S (j) не учитывается.
Проектирование ведется в следующей последовательности.
Из точки OI (рис. 2.5) проводим окружность радиусом равным Rn (эта окружность будет соответствовать крайним правым проколам иглы), а затем окружность радиусом RЛ =Rn + lN (крайние левые проколы иглы). Если строчка более сложной конфигурации, то следует провести окружность радиусом Rn + 2lN; Rn +3lN и т.д.
Полученные окружности делим на части в соответствии с передаточным отношением i = 12. Каждая часть (dI, dII, dIII и т.д.) будет соответствовать процессу образования одного стежка. Далее на участках, соответствующих стежкам I, III, V, VII, IX, XI (dI, dIII, dV, dVII, dIX, dXI) необходимо выделить зону d¢X, соответствующую зоне j¢X (отклонению иглы поперек линии строчки). Для этого углы dI, dIII, … dXI разбивают пополам и от полученной линии симметрично откладывают угол  .
.

Для нашего случая построение профиля следует начать с окружности радиуса RЛ, т.к. -она соответствует проколу I (рис. 2.4). Выстой иглы показан на профиле соответствующей дугой окружности, а отклонение - линией перехода либо с окружности RЛ на окружность Rn (стежки I, V, IX), либо с окружности Rn на окружность RЛ (стежки III, VII, XI).
Стежки II, IV, VI, VII, X, ХII образуются без отклонения иглы и поэтому участков перехода на профиле кулачка нет.
Построенный профиль кулачка для одного раппорта строчки следует повторить еще 2 раза.
Если построения выполнены правильно, то должна получиться замкнутая кривая А, соответствующая теоретическому профилю кулачка.
Для того, чтобы получить практический профиль кулачка, необходимо навести ряд окружностей радиусом Rp, центры которых располагаются на теоретическом профиле А, и полученные окружности соединить плавной кривой - профиль В (рис. 2.5).
В разделе кинематическая схема механизмов машины предусматривается изобразить схему определенных механизмов машины зигзагообразной строчки по заданию преподавателя. Схему следует выполнять, используя литературные источники [4, 5, б], лекционный материал и материалы лабораторных работ. Дать описание работы, устройства и регулировок этих механизмов.
Заканчивается расчетно-пояснительная записка выводами и рекомендациями по результатам проделанной работы и списком литературы. Требования к оформлению расчетно-пояснительной записки изложены в разделе 3.
Графическая часть проекта содержит три листа формата A1.
Лист 1. Кинематическая схема машины.
Лист 2. Графический анализ механизма вертикальных перемещений иглы. Чертеж кулачка.
Лист 3. Проектирование профиля кулачка.
Правила оформления графической части проекта изложены в разделе 4. Пример оформления чертежа копирного диска представлен в приложении.
Не нашли, что искали? Воспользуйтесь поиском: