ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Лабораторная работа №6 Изучение основ микроконтроллерного управления электроприводом на базе SIMATIC S7-200
6.1 Цель работы
Ознакомление cо схемой и принципами взаимодействия электропривода MICROMASTER 420 c контроллером SIMATIC S7-200 по USS протоколу.
6.2 Размещение оборудования, схема соединений и порядок работы
Преобразователь частоты MICROMASTER 420 (UZ) размещен на стенде слева от контроллера и силовым кабелем соединен с электродвигателем и схемой пуска (пускатель КМ;кнопки SB1,SB2; автомат QF) рисунок 6.1. Кабелем связи контроллер подключен к преобразователю и персональному компьютеру рисунок 6.2.
Работа с оборудованием производится в следующем порядке:
а) включается автомат QF и кнопкой SB1 подается напряжение на преобразователь;
б) производится параметрирование преобразователя для работы по USSпротоколу с помощью программы SIMOVIS на персональном компьютере;
в) запускается программа MICRO/Win 3.2 для работы с контроллером;
г) в открывшемся окне создается новый проект и с помощью редактора LADформируется программа управления электроприводом, согласно заданного алгоритма,в которую добавляются команды USS протокола;
д) разработанная программа загружается в контроллер;
г) производится старт программы и проверка работы привода на соответствие требуемому алгоритму.
6.3 Команды протокола USS для взаимодействия с электроприводами
. Команды протокола USS являются характерной особенностью STEP 7-Micro/WIN 32 Toolbox. STEP 7-Micro/WIN 32 Toolbox упрощает управление приводами MicroMaster за счет включения предварительно скомпонованных
подпрограмм и программ обработки прерываний, специально разработанных для обмена данными по протоколу USS. Эти программы появляются в качестве команд в папке библиотек дерева команд STEP 7-Micro/WIN. При помощи этих новых команд мы можем управлять физическим приводом и параметрами чтения/записи для привода. Рассмотрим назначение основных команд протокола USS.
Команда USS_INIT (Приложение А)используется для того, чтобы деблокировать и инициализировать или блокировать обмен данными с

|
Рисунок 6.1

Рисунок 6.2
приводомMICROMASTER. Команда USS_INIT должна быть выполнена без возврата кода ошибки, прежде чем можно будет использовать любую другую команду протоколаUSS. Эта команда завершается, и сразу устанавливается бит Done (флаг готовности) перед переходом к следующей команде. Команда выполняется в каждом цикле обработки программы, когда включен вход EN. КомандаUSS_INIT должна выполняться ровно один раз для каждого изменения состояния обмена данными.Поэтому вход EN должен включаться импульсом через элемент обнаружения фронта сигнала.Если протокол USS был запущен, то он должен блокироваться путем выполнения новой команды USS_INIT прежде, чем может быть сделано изменение в параметрах инициализации. Значение входа USS выбирает протокол обмена данными. Значение1назначает порт 0 протоколу USS и деблокирует этот протокол. Значение 0назначает порт 0 протоколу PPI и блокирует протокол USS. BAUD устанавливает скорость 1200, 2400, 4800, 9600 или 19200 Бод. ACTIVE указывает, какие приводы являются активными. Некоторые приводы поддерживают только адреса с 0 по 30. Любой привод, отмеченный как ACTIVE, автоматически опрашивается в фоновом режиме работы для того, чтобы управлять приводом, собирать данные о состоянии и предотвращать простои последовательного канала связи в приводе. Для вычисления времени между опросами состояния обратитесь к таблице 11–1 на стр. 11–3. Для получения информации о том, как настроить параметр времени простоя последовательного канала связи (P093), обратитесь к разделу 11.5.
Команда DRV_CTRL используется для управления активным приводом MICROMASTER.Команда DRV_CTRL размещает выбранные команды в коммуникационном буфере. Команды из буфера передаются адресованному приводу (параметр DRIVE), если этот привод был выбран в параметре действие привод, нужно выполнить следующее:
- DRIVE должен быть выбран как ACTIVE в USS_INIT;
- OFF1 и OFF2 должны быть установлены в 0;
- FAULT и INHIBIT должны быть равны 0.
Когда бит RUN выключается, приводу MicroMaster передается команда линейно понижать скорость до останова двигателя. Бит OFF2 используется для того, чтобы разрешить приводу MicroMaster вращаться по инерции до
останова.Бит OFF3 используется, чтобы подать приводу MicroMaster команду остановиться быстро. Вход DRIVE (адрес привода) является адресом приводаMicroMaster,которому должна передаваться команда DRV_CTRL. Действительными являются адреса с 0 по 31. SPD_SP (уставка скорости) – это скорость привода,заданная как процент от полной скорости (от –200,0% до 200,0%). Отрицательные значения SPD_SP заставляют привод изменить направление его вращения на противоположное.
Бит RSP_R (Response Received [ответ принят]) подтверждает ответ привода. Все АКТИВНЫЕ приводы опрашиваются с целью получения информации о самом последнем состоянии привода. Каждый раз, когда CPU получает ответ привода, RSP_R бит включается на один цикл обработки программы, и обновляются все следующие значения. ERR – это байт ошибки, содержащий результат самого последнего коммуникационного запроса к приводу. SPEED - это скорость привода, выраженная в процентах от полной скорости (от –200,0% до 200,0%). RUN_EN (RUN Enable [деблокировка RUN])показывает, работает ли привод (1) или остановлен (0). DIR_CW показывает направление вращения привода (0 - против часовой стрелки, 1 - по часовой стрелке). INHIBIT показывает состояние бита запрета в приводе (0 - не запрещен,1- запрещен). Для того, чтобы сбросить бит запрета, нужно выключить бит FAULT,а также выключить входы RUN, OFF2 и OFF3. FAULT [неисправность] показывает состояние бита неисправности (0 – нет неисправности, 1 - неисправность).
Команда READ_PM считывает параметр привода.Транзакция READ_PMзавершается, когда привод MicroMaster подтверждает получение команды или когда регистрируется ошибочное состояние. Пока этот процесс ожидает ответа,продолжает выполняться логическое сканирование программы. Бит EN, чтобы деблокировать передачу запроса, должен быть включен и оставаться включенным до тех пор, пока не установится бит DONE, сообщая о завершении процесса. ЗапросREAD_PM передается приводу MicroMaster в каждом цикле обработки программы,когда вход XMT_REQ включен. Поэтому вход XMT_REQ должен включаться импульсно через элемент обнаружения фронта сигнала, вызывающий передачу одного запроса для каждого положительного фронта на входе EN. Вход DRIVE – это адрес приводаMicroMaster, которому должна передаваться команда READ_PM.
Команда WRITE_PM записывает параметр привода в заданную ячейку.Транзакция WRITE_PM завершается, когда привод MicroMaster подтверждает получение команды или когда регистрируется ошибочное состояние. Пока этот процесс ожидает ответа, продолжает выполняться логическое сканирование программы. Бит EN, чтобы деблокировать передачу запроса, должен быть включен и оставаться включенным до тех пор, пока не установится бит DONE, сообщая о завершении процесса. Запрос WRITE_PM передается приводу MicroMaster в каждом цикле обработки программы, когда вход XMT_REQ включен. Поэтому вход XMT_REQдолжен включаться импульсно через элемент обнаружения фронта сигнала,вызывающий передачу одного запроса для каждого положительного фронта на входеEN. Вход DRIVE – это адрес привода MicroMaster, которому должна передаваться командаWRITE_PM. Действительными адресами отдельных приводов являются адреса с 0 по31. PARM является номером параметра. VAL – это значение параметра, подлежащее записи. На вход DB_PTR должен подаваться адрес 16-байтового буфера. Этот буфер используется командой WRITE_PM, чтобы сохранять результаты команды, поданной на привод MicroMaster. Когда команда WRITE_PM завершается, выход DONE включается,и выходной байт ERR содержит результат выполнения команды.
В каждый конкретный момент времени может быть активна только одна команда READ_PMили WRITE_PM.
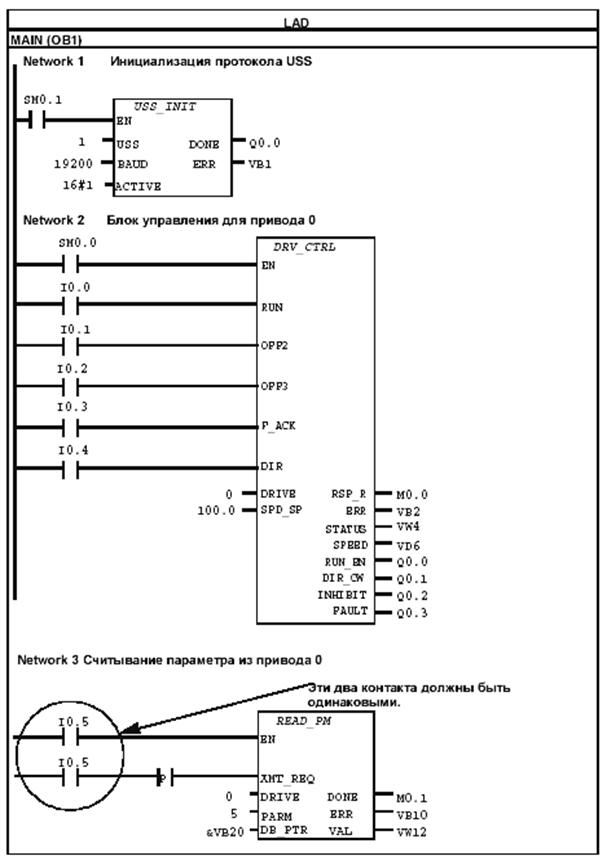
Рисунок 6.3
На рисунке 6.3 показан пример записи программы с применением рассмотренных команд.
6.4 Особенности работы протокола USS и последовательность программирования
Универсальный протокол последовательного интерфейса (USS) обеспечивает информационный доступ к оборудованию по принципу мастер -подчиненный(master-slave). К сети могут подключаться только 1 мастер и до 31 подчиненного устройства. К каждому устройству мастер обращается через параметры адреса,указываемые в сообщении. Подчиненное устройство никогда не может самостоятельно(без запроса) формировать сообщение или обращаться к другим подчиненным устройствам в сети.
Для активизации протокола необходимо выполнить следующие действия:
а) поместите команду USS_INIT в программу пользователя. Это автоматически добавит в программу несколько скрытых подпрограмм и программ обработки прерываний. Команда USS_INIT должна вызываться только на один цикл обработки программы, чтобы инициализировать или изменить параметры обмена данными по USS;
б) назначьте первой ячейке в таблице глобальных символов USS адрес
V-памяти(для переменных USS резервируется блок V-памяти размером 400 байтов). Все другие адреса назначаются автоматически.
в) поместите в свою программу только по одной команде DRV_CTRL на активный привод. Команд READ_PM и WRITE_PM может быть несколько, но только одна из них может быть активной в каждый конкретный момент времени.
6.5 Программа работы
6.5.1 Провести параметрирование и конфигурирование привода для работы по USSпротоколу.
6.5.2 Разработать и набрать программу работы двигателя в соответствии с алгоритмом, заданным преподавателем.
6.5.3 Загрузить программу в контроллер и проверить работу двигателя на соответствие заданному алгоритму.
6.6 Содержание отчета
1 Электрическая схема стенда
2 Алгоритм и программа
3 Выводы
Приложение А
Элементы программирования STEP 7-Micro/Win 3.2
1 Операции над входами
Замыкающий контакт включен, если значение бита
с адресом n равно 1.
Размыкающий контакт включен, если значение бита
с адресом n равно 0.

Замыкающий контакт с непосредственным
доступом включен, если значение бита заданного
входа n равно 1.

Размыкающий контакт с непосредственным
доступом включен, если значение бита заданного
1 входа n равно 0.
 Контакт «NOT»изменяет состояние потока сигнала.
Контакт «NOT»изменяет состояние потока сигнала.
Если поток сигнала достигает контакта NOT, то он
у контакта останавливается. Если поток сигнала не
достигает контакта NOT, то у контакта создается
поток сигнала.

Контакт «Обнаружение» нарастающего фронта пропускает поток сигнала в течение цикла при каждом нарастающем фронте.

Контакт «Обнаружение» спадающего фронта пропускает поток сигнала в течение цикла при каждом спадающем фронте.

Операция «Сравнение» действительных чисел сравнивает два значения n1 и n2друг с другом. Вы можете производить следующие сравнения:
n2 n1 = n2, n1 >= n2 и n1 <= n2.
Операнды:n1, n2: VD, ED, AD, MD, SMD, AC. В LAD контакт замкнут, если результатом сравнения является истина.
2 Операции над выходами

Если выполняется операция «Присваивание», то заданный параметр (n) включается.

Если выполняется операция «Прямое присваивание»значения биту,то заданный физический выход (n)непосредственно включается.

Если выполняются операции «Установка и Сброс», то заданное количество (N) входов или выходов, начиная с S_BIT,включается или выключается.

Операнды: S_BIT: E, A, M, SM, T, Z, V, S
N: EB, AB, MB, SMB, VB, AC.

Есливыполняются операции «Прямая установка» и «Прямой сброс», то заданное количество(N) входов или выходов, начиная с S_BIT, включается или выключается.
 Операнды: S_BIT: A
Операнды: S_BIT: A
N: EB, AB, MB, SMB, VB, AC.
3 Команды управления программой

Команда «Завершение программы» заканчивает
END работу главной программы в зависимости от
результата предшествующей логической
операции.

Команда «STOP» заканчивает работу программы,
немедленно переводя CPU из режима RUN в
режим STOP.

Команда «Переход на метку» выполняет ветвление
программы к заданной метке перехода (n).

Команда «Вызов подпрограммы» передает
управление подпрограмме (n).
Команда «Условное окончание» подпрограммы
завершает подпрограмму в зависимости от
результата предшествующей логической
операции.

Любая подпрограмма должна заканчиваться RET командой «Абсолютное окончание подпрограммы».
4 Таймеры
С помощью таймеров можно выполнять функции, управляемые временем. S7–200предоставляет две разные таймерные операции: запуск таймера как формирователя задержки включения (TON) и запуск таймера как формирователя задержки включения с запоминанием ( TONR). Эти два типа таймеров (TON и TONR) различаются по своей реакции на состояние входа разблокировки. Оба таймера TON и TONR отсчитывают значение времени, когда активизирован вход разблокировки. При выключенном входе разблокировки оба таймера не работают,однако в то время как таймер TON автоматически сбрасывается, то таймер TONR сохраняет свое последнее значение времени, а не сбрасывается. Поэтому лучше всего использовать таймер TON, когда нужен отдельный интервал времени, и использовать таймер TONR, когда необходимо накапливать несколько интервалов времени.

|
TON – (33-36)

5 Счетчики
Операция «Прямой счет»выполняет счет в прямом направлении при
нарастающем фронте на входе прямого счета (CU) до достижения максимального значения. Если текущее значение (Zxxx) >= предварительно установленному значению (PV), то включается бит счетчика (Zxxx). Счетчик сбрасывается, если активизируется вход сброса.
Операция «Реверсивный счет»выполняет счет в прямом направлении при нарастающем фронте на входе прямого счета (CU). При нарастающем фронте на входе обратного счета (CD) выполняется счет в обратном направлении. Если текущее значение (Zxxx) >= предварительно установленному значению (PV), то включается бит счетчика (Zxxx). Счетчик сбрасывается, если активизируется вход сброса.


STUD – реверсивный счетчик
6 Арифметические операции
Операции Сложение целых чисел (16бит) и Вычитание складывают и вычитают два целых
числа и передают результат (16бит) на выход. Операнды:IN1, IN2: VW, AW, MW,T,Z.AEW OUT: VW, AW, MW, T, Z, SMW
KOP: IN1 + IN2 = OUT IN1– IN2 = OUT

7Инкрементирование декрементирование

Операции Увеличить байт на 1 и Уменьшить байт на 1 прибавляет или вычитает 1 из значения входного байта
Операнды: IN: VW, EW,AB, MB, SMB OUT: VW, EW,AB, MB, SMB
|
КОР: IN + 1 = OUT IN – 1 = OUT
8Команды USS протокола

|
Команда DRV_CRL

|
Команда USS_INIT

Команда READ_PM
Приложение Б
Не нашли, что искали? Воспользуйтесь поиском: