ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Вимого до оптичної системи та процесу обробки цифрових фотозображень апаратурою безпілотного літального апарата.
Для розвідки [11,12] місцевості перспективним є використання фото-, відеоапаратури на основі твердо тільних матриць – так названих приладів із зарядовим зв’язком (далі матриці ПЗЗ), які дозволяють здійснити режим візуалізації, аналогічний роботі зорового апарату людини та використовуються в перспективній апаратурі БПЛА з метою здійснення моніторингу місцевості. Необхідність забезпечення необхідної роздільної здатності матриць ПЗЗ, що
використовуються в сучасній апаратурі цифрової зйомки веде до збільшення об’ємів пам’яті. Створюються інтегровані конструкції, в яких матриці ПЗЗ поєднані з системами обробки електронних зображень. Прикладами таких БПЛА, які створені в Україні є багатоцільовий безпілотний комплекс М-6 "Жайвір" (рис.7), що створений та проходить льотні випробування дослідного зразка на науково-виробничому центрі безпілотної авіації "Віраж" Національного авіаційного університету. Призначення комплексу: аерофотознімання, відеоспостереження в реальному часі та патрулювання лінійних об’єктів.
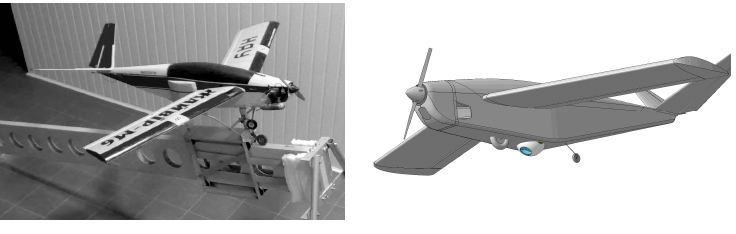
М-6Е на катапультному пристрої М-6Б з гіростабілізованою камерою (3Д модель)
Рис.7. Модифікації безпілотного комплексу М-6 "Жайвір"
Цифрова обробка зображень отриманих з БПЛА набуває особливого поширення. Різноманітність методів та алгоритмів пов’язано з широким колом проблем, які виникають під час обробки та передачі цифрових даних в апаратурі БПЛА, а особливо проблеми обробки в реальному масштабі часу. На підставі проведеного аналізу тенденцій розвитку використання матриць ПЗЗ та алгоритмів цифрової обробки для отримання інформації з БПЛА, можливо зробити висновок, що на сьогодні є актуальним завданням:
– обґрунтування вимог до оптичної системи та процесу обробки цифрових фотозображень апаратурою БПЛА;
– вирішення протиріччя між отриманням необхідної якості зображень та забезпеченням максимально можливого стиснення даних.
Безпілотний авіаційний комплекс здатен:
– проводити цифрове картографічне фотографування місцевості;
– фото-, відеореєстрацію з невеликих висот подій та об’єктів на місцевості;
– виявляти наявності й характеру інженерного обладнання місцевості, райони руйнувань.
Основною перевагою застосування БПЛА є те, як вже згадувалось раніше, що він може застосуватися в ситуаціях без ризику для життя та здоров’я пілотів. При великій кількості переваг безпілотної зйомки, особливості даних, що отримуються, мають деякі проблемні питання: низька якість зображень при поганих погодних умовах; невелика точність даних GPS; похибки пов’язані з нестабільністю польоту. Все це вимагає додаткової обробки, яка дозволить зменшити вплив даних недоліків та отримувати якісний вихідний результат. Необхідність переробки великих масивів інформації призводить до її можливого старіння або навіть втрати частини важливої інформації. Крім цього, великий обсяг інформації, що підлягає обробці, перевантажує канал зв’язку “борт–земля” та знижує загальну ефективність використання БПЛА. У загальному плані для БПЛА характерно те, що ефективність функціонування системи обробки інформації та управління (СОІУ) тісно пов’язана з продуктивністю обробки інформації в реальному часі.
Обробка СОІУ візуальної інформації на борту БПЛА також пов’язана з низкою додаткових вимог до системи обробки інформації. Необхідність дотримання габаритно-вагових вимог до СОІУ БПЛА вступає в протиріччя з необхідністю обробляти і передавати в реальному часі великі обсяги інформації.
Цифрову обробку фотозображень апаратурою безпілотного літального апарату, що здійснює розвідку місцевості, можна поділити на такі етапи (рис.8):
– реєстрація зображення та його оцифровка;
– стиснення зображення та кодування;
– передача зображення по каналу зв’язку;
– декодування та корекція зображення у випадку необхідності (фільтрація);
– дешифрування зображення (виділення ознак об’єктів моніторингу).
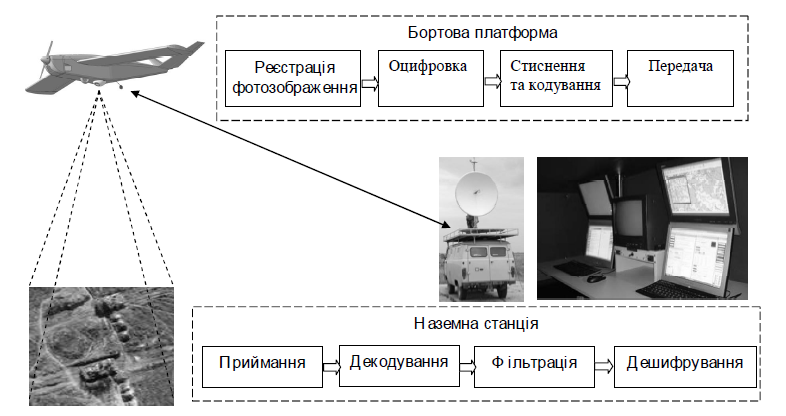
Рис.8. Етапи обробки фотозображень об’єктів розвідки
Такі етапи, як реєстрація зображення та його оцифровка, стиснення та кодування, передача по каналу зв’язку, можна умовно назвати етапами попередньої обробки. Етап декодування, фільтрація, дешифрування зображення (виділення ознак об’єктів моніторингу) відповідно етапом заключної обробки.
Для БПЛА залежно від висоти польоту можна здійснити таким чином, наприклад: камера використовується з об’єктивом, який дає десятикратне оптичне збільшення; розмір кадру 4000 х 3000 пікселів (12 мегапікселів); матриця камери має розмір 4 х 3 дюйма, що відповідає 18 х 13,5 мм.
Для визначення розміру пікселя (R) необхідно поділити розмір матриці в міліметрах на розмір кадру в пікселях, причому береться менший розмір (у даному випадку 3000 пікселів).
R = 13,5 / 3000 = 0,0045 (мм).
Фокусна відстань (F) визначається, виходячи з оптичного збільшення:
F = 13,5*10 = 135 (м);
в пікселях
F =13, 5 / 0, 0045 = 30000 (пікс.).
Для цифрової зйомки використовується поняття «розмір пікселя на місцевості» (у англомовній літературі GSD – ground sample distance). GSD визначає точність результатів подальшої обробки, при зйомці з висоти:
GSD = H / F,
де H – висота, см; F – фокусна висота, пікс.
Для зйомки з висоти 500 метрів над землею (50000 см) величина GSD буде дорівнювати:
GSD = 50000 / 30000 = 1, 67 (см).
Якщо відома GSD, то можна визначити геометричні розміри поверхні, яка попадає у кадр:
– довжина А = 4000*1, 67 = 6680 (см);
– ширина В = 3000*1, 67 = 5000 (см).
При виводі зображення на монітор або для друку фотографій у пікселів з’являється фізичний розмір. Чим більше пікселів на дюйм (англ. – pixels per inch-ppi), тим менш помітними будуть окремі пікселі й тим більш реалістичним буде виглядати зображення. Для отримання якісного зображення в одному дюймі повинно міститися 300 точок (пікселів).
Оригінальний розмір зображення:
– довжина зображення А1 = 4000 / 300 = 13,3 (дюйм) = 33,87(см);
– ширина зображення В1 = 3000 / 300 = 10 (дюйм) = 25,4(см).
Наприклад, задача розвідки полягає у визначенні людей в зоні спостереження (наприклад, 2 * 0,6 м), тоді:
Х = 2 * 25,4 / 50 = 1,02 (см);
Y = 0,6 * 33,87 / 66,8 = 0,3 (см).
Дана методика дуже проста та дозволяє порівнювати різні характеристики оптичної системи. Аналізуючи отримані результати, можна зробити такі висновки: використовуючи оптику, яка має більше оптичне збільшення, отримаємо на зображенні більший розмір необхідного нам об’єкта (людини); при більшому оптичному збільшені розмір земної поверхні, що потрапила в кадр, зменшується; використовуючи камеру з більшою кількістю пікселів, збільшуємо розмір зображення на екрані.
Оптичні системи в БПЛА реалізуються у вигляді системи оптичних пристроїв, що розміщуються або безпосередньо в корпусі БПЛА та жорстко пов’язані з його конструкцією або за допомогою платформ з гідростабілізацією, що забезпечують поворот оптичних пристроїв у будь-який бік із заданою швидкістю.
Як правило, жорсткий зв’язок оптичної осі пристрою з конструкцією БПЛА використовується для авіаційних фотокамер і оптичних пристроїв огляду передньої або інших півсфер БПЛА. У (таблиці 3) наведені приклади характерних оптичних пристроїв, що можуть встановлюватися на літаки та БПЛА. З наведених даних видно, що оптичні датчики і фотокамери сильно відрізняються за розмірами і за масою. Очевидно, що реалізація таких специфічних вимог як дальність до об’єкта зйомки і високе розрізнення на місцевості неминуче призводить до зростання маси і вартості подібних пристроїв. Застосування подібних пристроїв дозволяє вирішувати велику кількість практичних завдань, проте для отримання якісного результату потрібне виконання жорстких вимог до стабілізації положення БПЛА у повітрі в момент проведення зйомки. На жаль, принцип пристрою подібних пристроїв, в основному, не дозволяє реалізовувати режими супроводу цілей, а при спробі реалізації режиму супроводження цілі, з’являється велика кількість обмежень.
Таблиця 3
Технічні дані оптичних пристроїв
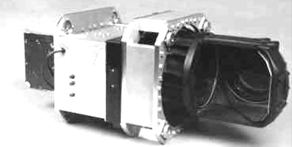
| Країна-виробник: Великобританія. Призначення, тип: електронно-оптичний датчик для розвідки і спостереження на малих і середніх висотах польоту, Type 8040B. Діаметр вхідної лінзи: 450 мм. Діапазон висот застосування: від 60 м до 12 км. Дальність похилої застосування: від 300 м до 40 км. Маса: до 10 кг залежно від комплектації |

| Країна-виробник: Великобританія. Призначення, тип: електронно-оптичний датчик для розвідки і спостереження на малих і середніх висотах польоту, Type 8010. Діаметр вхідної лінзи: до 150 мм. Діапазон висот застосування: від 60 м до 12 км. Дальність похилої застосування: від 300 м до 40 км. Маса: до 7,5 кг, з лінзою 150 мм до 10,5 кг |
| Країна-виробник: Великобританія. Призначення, тип: оптична камера для панорамної розвідки і спостереження на малих і середніх висотах польоту, Vinten Type 950/955. Діаметр вхідної лінзи: до 150 мм. Носій інформації: 127 мм фотоплівка. Маса: від 37 до 56 кг залежно від комплектації |
| Країна-виробник: США. Призначення,тип:авіаційна фотокамера великої дальності, KS - 127B. Фокусна відстань: 1,6704 м. Діапазон висот застосування: до 10 км. Дальність похилої застосування: більше 55 км. Дозвіл в режимі панорамної зйомки: 12 064 эл. х 32 лін. Маса: 272 кг. |

| Країна-виробник: Україна (НВП “Геосистема”), 3DAS1. Призначення, тип: оптична система. Фокусна відстань: 110 мм. Висота польоту: 550…5500 м. Польотна швидкість 110…400 км/год. Ширина пристрою: 0,528 м. Висота пристрою: 0,637 м. Маса: від 59 кг |
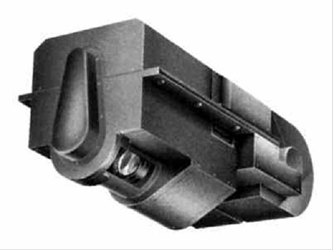
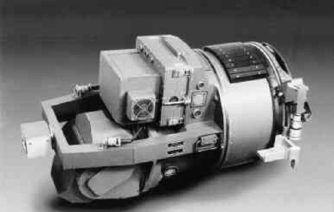
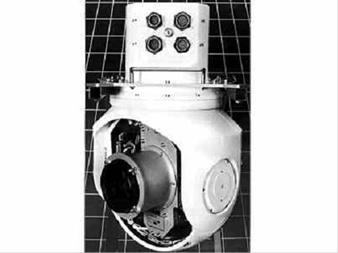
Гнучкішими виявляються оптичні пристрої, що розміщуються на гіростабілізованих платформах. Світова практика накопичила достатній досвід застосування подібних пристроїв і ринок електронно-оптичних систем спостереження пропонує їх широкий асортимент (табл.4). Використання гіростабілізованих платформ з оптичними пристроями може забезпечувати виконання завдання супроводу літальних апаратів у польоті. Спільна установка телевізійної та інфрачервоної камер дозволяє суттєво підвищити інформативність отриманого зображення, а доповнення у вигляді лазерного далекоміра дає можливість точного визначення відносних координат об’єктів спостереження.
Таблиця 4
Технічні дані оптичних пристроїв на гіростабілізованих платформах
| Оптичний пристрій | Основні технічні дані |
| Країна-виробник: ЮАР. Призначення, тип: оптична система (телевізійна та інфрачервона камера) для розвідки і спостереження на малих і середніх висотах польоту. Кути повороту платформи по азимуту: 360,00. Кути повороту по куту місця: від +20 до -1200. Маса: від 37 до 56 кг залежно від комплектації |

| Країна-виробник: Ізраїль. Призначення, тип: оптична система (телевізійна та інфрачервона камера) для розвідки і спостереження на малих і середніх висотах польоту. Лазерний дальномір – є. Маса: від 26 до 39 кг залежно від комплектації |
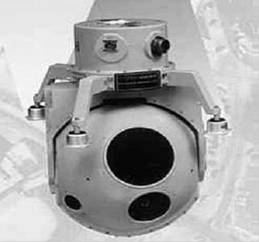
| Країна-виробник: Ізраїль, DSP-1. Призначення, тип: оптична система (телевізійна та інфрачервона камера) для розвідки і спостереження на малих і середніх висотах польоту. Діаметр пристрою: 0,32 м. Висота пристрою: 0,50 м. Маса: від 26 кг |
Оптичні системи на гіростабілізованих платформах поступово починають займати важливе місце в цільових навантаженнях БПЛА. Їх складність і насиченість різноманітними функціями (супровід літального апарату в просторі, обчислення відносних координат точки в просторі) постійно збільшуються, росте і вартість подібних пристроїв. Тим більше, що складність завдань, що покладаються на безпілотну техніку, постійно росте.
2.5.Розробка технологічної схеми особливостей застосування БПЛА для військових цілей (аерознімання)
Технологічна схема особливостей застосування БПЛА для військових цілей




 | |||||
 | |||||
 | |||||


Не нашли, что искали? Воспользуйтесь поиском: