ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Настройка регулятора по ограничению ошибки
Данный метод настройки основывается на оптимизации переходной характеристики h(t) системы, когда параметры регулятора подбираются такими, чтобы характеристика h(t) вошла в заранее заданные границы. Для системы «двигатель – генератор» вместо переходной характеристики применяются линейно нарастающие сигналы, поэтому оптимизацию h(t) заменим инимизациией динамической ошибки в системе.
Для реализации данного метода применим блок Signal Constraint из пакета Simulink. Схема для минимизации ошибки представлена на рисунке 33.

Рисунок 32 – Схема замкнутой системы для минимизации ошибки
ПИД-регулятор здесь имеет ту же структуру, что и на рисунке 21. В настройках блока Signal Constraint выберем в качестве оптимизируемых параметров настроечные параметры ПИД-регулятора и зададим их начальные значения:
kп = –30; kи = –30; kд = –30.
Пределы ошибки зададим от –0,01 Ωн до 0,01 Ωн или от –0,64 до 0,64 рад/сек.
На рисунке 34 представлен процесс оптимизации параметров ПИД-регулятора.

Рисунок 33 – Процесс оптимизации
В результате пяти итераций получен окончательный вид изменения ошибки во времени (рисунок 35) и оптимальные параметры ПИД-регулятора: kп -266.9359; kи = -131.4193; kд = -69.7561
Промоделируем работу системы, используя полученные параметры ПИД-регулятора. Для этого подставим их в регулятор (рисунок 21) модели, представленной на рисунке 20. Временная диаграмма управляющего напряжения u2 для данного случая приведена на рисунке 36, скорости вращения Ω – на рисунке 37, токов iд и iг – на рисунке 38. Управляющее воздействие u1 задано программно, поэтому его вид для всех рассмотренных регуляторов соответствует изображенному на рисунке 8.

Рисунок 34 – Временная зависимость управляющего напряжения u2

Рисунок 35 – Временная зависимость скорости вращения Ω
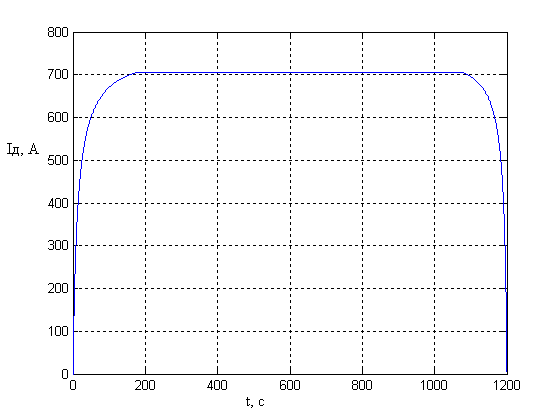
Рисунок 36 – Временные зависимости тока iд
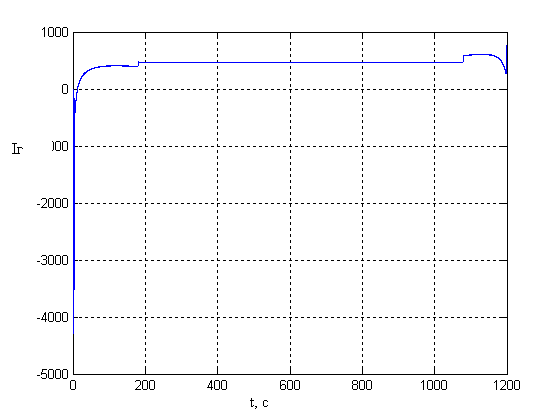
Рисунок 37 – Временные зависимости тока iг
Не нашли, что искали? Воспользуйтесь поиском: