ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
ТРЕБОВАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
ГОУ ВПО Рыбинская государственная авиационная технологическая
Академия им. П.А. Соловьева
КАФЕДРА ОБЩЕЙ И ТЕХНИЧЕСКОЙ ФИЗИКИ
УТВЕРЖДЕНО
на заседании методического
семинара кафедры ОиТФ
«» _________ 2007 г.
Зав.каф. Пиралишвили Ш.А.
Лаборатория «Волновая механика»
ЛАБОРАТОРНАЯ РАБОТА № ВМ – 1
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ
С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО МАЯТНИКА
| Нормоконтроль | Автор: к. т. н., доцент Суворова З. В. |
| ____________ | ___________________ |
| Рецензент: к. ф–м. н., доцент Шалагина Е.В. | |
| ___________________ |
Рыбинск 2007
ТРЕБОВАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
При выполнении работы соблюдать требования инструкции №170 по технике безопасности. При работе с электросекундомером соблюдайте правила безопасного обращения с прибором. При проведении эксперимента колебания маятников следует возбуждать не толчками, а малыми отклонениями (30 – 50) от положения равновесия.
1. КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Ускорение силы тяжести  является одной из важнейших характеристик гравитационного поля. Используемая в лабораторном эксперименте установка – универсальный маятник представляет собой систему из двух маятников. Методика работы с ними несколько отлична, хотя и содержит много общих черт. Определение основано на исследовании колебательного движения маятников.
является одной из важнейших характеристик гравитационного поля. Используемая в лабораторном эксперименте установка – универсальный маятник представляет собой систему из двух маятников. Методика работы с ними несколько отлична, хотя и содержит много общих черт. Определение основано на исследовании колебательного движения маятников.
Колебание – один из самых распространённых процессов в природе и технике. Колебания – это процессы, повторяющиеся во времени. Колебания бывают механические, электромагнитные, химические, термодинамические и др. Несмотря на такое многообразие, все колебания описываются одними и теми же дифференциальными уравнениями.
Первыми учёными, изучавшими колебания, были Галилео Галилей и Христиан Гюйгенс. Галилей установил независимость периода колебаний от амплитуды. Гюйгенс изобрёл часы с маятником.
Любая система, которая, будучи слегка выведена из положения равновесия, совершает устойчивые колебания, называется гармоническим осциллятором. В классической физике такими системами являются математический маятник в пределах малых углов отклонения, груз на пружине в пределах малых деформаций пружины, не выходящих за рамки закона Гука, электрический контур, состоящий из линейных элементов ёмкости и индуктивности.
 Рис. 1
Рис. 1
|
Гармонический осциллятор можно считать линейным, если смещение от положения равновесия прямо пропорционально возмущающей силе. Частота колебаний гармонического осциллятора не зависит от амплитуды. Для осциллятора выполняется принцип суперпозиции - если действуют несколько возмущающих сил, то эффект их суммарного действия может быть получен как результат сложения эффектов от действующих сил в отдельности.
Гармонические колебания описываются уравнением (рис.1)
 (1)
(1)
где х -смещение колеблющейся величины от положения равновесия, А – амплитуда колебаний, равная величине максимального смещения,  - фаза колебаний, определяющая смещение в момент времени
- фаза колебаний, определяющая смещение в момент времени  ,
,  - начальная фаза, определяющая величину смещения
- начальная фаза, определяющая величину смещения  в начальный момент времени,
в начальный момент времени,  - циклическая частота колебаний.
- циклическая частота колебаний.
Время одного полного колебания называется периодом,  , где
, где  - число колебаний, совершенных за время
- число колебаний, совершенных за время  .
.
Частота колебаний  определяет число колебаний, совершаемых в единицу времени, она связана с циклической частотой соотношением
определяет число колебаний, совершаемых в единицу времени, она связана с циклической частотой соотношением  , тогда период
, тогда период  .
.
Скорость колеблющейся материальной точки
 ,
,
Ускорение  . (2)
. (2)
 Рис. 2
Рис. 2
|
Таким образом, скорость и ускорение гармонического осциллятора также изменяются по гармоническому закону с амплитудами  и
и  соответственно. При этом скорость опережает по фазе смещение на
соответственно. При этом скорость опережает по фазе смещение на  , а ускорение – на
, а ускорение – на  (рис.2).
(рис.2).
Из сопоставления уравнений движения гармонического осциллятора (1) и (2) следует, что  , или
, или
 . (3)
. (3)
Это дифференциальное уравнение второго порядка называется уравнением гармонического осциллятора. Его решение содержит две постоянные а и  , которые определяются заданием начальных условий
, которые определяются заданием начальных условий
 .
.
Отсюда  .
.
Если периодически повторяющийся процесс описывается уравнениями, не совпадающими с (1), он называется ангармоническим. Система, совершающая ангармонические колебания, называется ангармоническим осциллятором.
В природе очень распространены малые колебания, которые система совершает вблизи своего положения равновесия. Если система, выведенная из положения равновесия, предоставлена себе, то есть на неё не действуют внешние силы, то такая система будет совершать свободные незатухающие колебания. Рассмотрим систему с одной степенью свободы.
Устойчивому равновесию соответствует такое положение системы, в котором её потенциальная энергия  имеет минимум (q – обобщённая координата системы). Отклонение системы от положения равновесия приводит к возникновению силы
имеет минимум (q – обобщённая координата системы). Отклонение системы от положения равновесия приводит к возникновению силы  , которая стремится вернуть систему обратно. Значение обобщённой координаты, соответствующей положению равновесия, обозначим
, которая стремится вернуть систему обратно. Значение обобщённой координаты, соответствующей положению равновесия, обозначим  , тогда отклонение от положения равновесия
, тогда отклонение от положения равновесия 
Будем отсчитывать потенциальную энергию от минимального значения  . Примем
. Примем  Полученную функцию разложим в ряд Маклорена и оставим первый член разложения, имеем:
Полученную функцию разложим в ряд Маклорена и оставим первый член разложения, имеем:
 ,
,
где  . Тогда с учётом введённых обозначений:
. Тогда с учётом введённых обозначений:
 , (4)
, (4)
С учётом выражения (4) для силы, действующей на систему, получаем:

Согласно второму закону Ньютона, уравнение движения системы имеет вид:  ,
,
тогда
 , (5)
, (5)
Выражений (5) совпадает с уравнением (3) свободных гармонических колебаний при условии, что
 , (6)
, (6)
и имеет два независимых решения:  и
и  , так что общее решение:
, так что общее решение:  , или
, или
 ,
,
где 
Из формулы (6) следует, что частота определяется только собственными свойствами механической системы и не зависит от амплитуды и начальных условий движения.
Зависимость координаты колеблющейся системы от времени можно определить в виде вещественной части комплексного выражения,  где
где  – комплексная амплитуда, её модуль совпадает с обычной амплитудой, а аргумент – с начальной фазой.
– комплексная амплитуда, её модуль совпадает с обычной амплитудой, а аргумент – с начальной фазой.
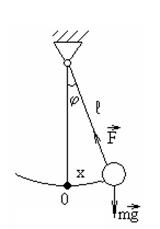 Рис. 3.
Рис. 3.
|
Под маятником понимают твёрдое тело, которое совершает под действием силы тяжести колебания вокруг неподвижной точки или оси. Различают физический и математический маятники.
Математический маятник – это идеализированная система, состоящая из невесомой нерастяжимой нити, на которой подвешена масса, сосредоточенная в одной материальной точке.
Математическим маятником, например, является шарик на длинной тонкой нити.
Отклонение маятника от положения равновесия характеризуется углом  , который образует нить с вертикалью (рис.3). При отклонении маятника от положения равновесия возникает момент внешних сил (силы тяжести)
, который образует нить с вертикалью (рис.3). При отклонении маятника от положения равновесия возникает момент внешних сил (силы тяжести)  :
:  , где m – масса,
, где m – масса,  – длина маятника
– длина маятника
Этот момент стремится вернуть маятник в положение равновесия (аналогично квазиупругой силе) и направлен противоположно смещению φ, поэтому в формуле стоит знак «минус».
Уравнение динамики вращательного движения для маятника имеет вид:  ,
,
или
 .
.
Будем рассматривать случай малых колебаний, поэтому  , обозначим
, обозначим  , имеем:
, имеем:  , или
, или  , и окончательно
, и окончательно
 .
.
Это уравнение гармонических колебаний, его решение:
 .
.
Частота колебаний математического маятника определяется только его длиной и ускорением силы тяжести, и не зависит от массы маятника. Период равен:
 . (6)
. (6)
Если колеблющееся тело нельзя представить, как материальную точку, то маятник называют физическим (рис.4). Уравнение его движения запишем в виде:
 Рис. 4.
Рис. 4.
|
 .
.
В случае малых колебаний  , или
, или  =0, где
=0, где
 . (7)
. (7)
Это уравнение движения тела, совершающего гармонические колебания. Частота колебаний физического маятника зависит от его массы, длины и момента инерции относительно оси, проходящей через точку подвеса.
Обозначим  . Величина
. Величина  называется приведённой длинной физического маятника. Это длина математического маятника, период колебаний которого совпадает с периодом данного физического маятника. Точка на прямой, соединяющей точку подвеса с центром масс, лежащая на расстоянии приведённой длины от оси вращения, называется центром качания физического маятника (О’). Если маятник подвесить в центре качания, то приведённая длина и период колебаний будут теми же, что и в точке О. Таким образом, точка подвеса и центр качания обладают свойствами взаимности: при переносе точки подвеса в центр качания прежняя точка подвеса становится новым центром качания.
называется приведённой длинной физического маятника. Это длина математического маятника, период колебаний которого совпадает с периодом данного физического маятника. Точка на прямой, соединяющей точку подвеса с центром масс, лежащая на расстоянии приведённой длины от оси вращения, называется центром качания физического маятника (О’). Если маятник подвесить в центре качания, то приведённая длина и период колебаний будут теми же, что и в точке О. Таким образом, точка подвеса и центр качания обладают свойствами взаимности: при переносе точки подвеса в центр качания прежняя точка подвеса становится новым центром качания.
Математический маятник, который качается с таким же периодом, как и рассматриваемый физический, называется изохронным данному физическому маятнику.
2. ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
Универсальный маятник представляет собой прибор, соединяющий маятник, являющийся имитацией математического, и оборотный физический маятник (рис.5).
Строго говоря, в установке скомбинированы два физических маятника, однако условие, что длина нити, на которой подвешен шарик, много больше его размеров, позволяет этот маятник принять за математический.
В случае проведения эксперимента с математическим маятником возникает проблема с определением  . Строго говоря, представляет собой расстояние от точки подвеса до центра масс шарика, но это расстояние точно зафиксировать нельзя.
. Строго говоря, представляет собой расстояние от точки подвеса до центра масс шарика, но это расстояние точно зафиксировать нельзя.
 Рис.5
Рис. 3
Рис.5
Рис. 3
|
Для исключения возникающей значительной погрешности следует определить период колебаний Т 1 при длине нити  , измеренной от центра колебаний до точки крепления нити на шарике, (т. е. задать некоторое неизвестное значение длины маятника
, измеренной от центра колебаний до точки крепления нити на шарике, (т. е. задать некоторое неизвестное значение длины маятника  ), затем измерить период колебаний Т 2 при длине нити
), затем измерить период колебаний Т 2 при длине нити  (длина маятника станет
(длина маятника станет  ).
).
Из формулы (6) имеем:  ;
;  . Из последних выражений легко получить:
. Из последних выражений легко получить:  ,
,
и  . (8)
. (8)
При этом точные значения  и
и  неизвестны, а известны и . Но, легко видеть, что
неизвестны, а известны и . Но, легко видеть, что  . Разность
. Разность  можно определить с высокой степенью точности, и формула (8) является расчетной для определения с помощью математического маятника. Конструкция прибора допускает изменения длины нити математического маятника.
можно определить с высокой степенью точности, и формула (8) является расчетной для определения с помощью математического маятника. Конструкция прибора допускает изменения длины нити математического маятника.
Физический маятник имеет две призмы для крепления на оси вращения. Положения этих призм подбираются так, чтобы периоды колебаний относительно той и другой призм были одинаковы (именно поэтому маятник и называют поворотным). Расстояние между точками крепления груза равно  В его конструкции реализована следующая идея. По теореме Штейнера момент инерции относительно оси вращения, около которой совершаются колебания
В его конструкции реализована следующая идея. По теореме Штейнера момент инерции относительно оси вращения, около которой совершаются колебания
 ,
,
где  – момент инерции маятника относительно центра масс,
– момент инерции маятника относительно центра масс,  расстояние от оси вращения (точки крепления маятника) до центра масс.
расстояние от оси вращения (точки крепления маятника) до центра масс.
Для каждой из опор в отдельности имеем:
 (9)
(9)
При Т 1 = Т 2 легко получаем
 . (10)
. (10)
После подстановки (9) в (10) получаем:  . Очевидно,
. Очевидно,  Тогда расчетная формула для принимает вид:
Тогда расчетная формула для принимает вид:
 , (11)
, (11)
где  – расстояние между точками подвеса оборотного маятника, которое может быть измерено достаточно точно.
– расстояние между точками подвеса оборотного маятника, которое может быть измерено достаточно точно.
В состав лабораторной установки входит также секундомер. Обычная комплектация лабораторной работы включает в себя электрический секундомер, который может быть заменен и механическим секундомером. На лицевой панели электросекундомера расположены кнопки управления: включения и выключения прибора, установки нуля и кнопка запуска. Точность прибора 0,01 с.
3. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
3.1 ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ С ПОМОЩЬЮ МАТЕМАТИЧЕСКОГО МАЯТНИКА
1. Задать длину нити подвеса , измеряя ее от точки подвеса до точки крепления. Нужно проследить, чтобы длина нити значительно превышала размеры шарика.
2. Отклонив маятник на 30–50 от положения равновесия, освободить его и определить время  10–15 полных колебаний. Опыт повторить не менее 5 раз. Результаты измерений занести в таблицу 1.
10–15 полных колебаний. Опыт повторить не менее 5 раз. Результаты измерений занести в таблицу 1.
3. Изменить длину укорачиванием нити, наматывая ее на опору маятника.
4. Выполнить опыты согласно п. 2 и результаты занести в таблицу 1.
Результаты опытов с математическим маятником Таблица 1
| № п/п |
| Число колебаний п | 
| 
|
| Число колебаний п | 
| 
|
| 
|
Произвести расчет по формуле:  .
.
5. Повторить п. 1-4 не менее 5 раз. Вычислить среднее значение и погрешность .
3.2 ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ
С ПОМОЩЬЮ ФИЗИЧЕСКОГО МАЯТНИКА
1. Маятник подвесить на одной из опорных призм. Наблюдать п =10¸15 полных малых колебаний и отмечать соответствующий им промежуток времени . Определить период колебания относительно этой опорной призмы:  .
.
2. Маятник подвесить на другой опорной призме, повторить все операции
п. 1 и определить период  .
.
3. Сопоставить результаты п. 1 и п. 2. Они должны быть одинаковыми. Если это не так, то дальнейший эксперимент проводить нельзя, так как маятник должен быть отрегулирован. Эта операция выполняется лаборантом.
4. После того как вы убедились, что Т 1 = Т 2 = Т можно выполнять эксперимент дальше. Пронаблюдать 10 – 15 полных малых (с амплитудой не более 30–50) колебаний, отметить их время  и определить период
и определить период  . Опыт повторить не менее пяти раз для каждой из опор. Результаты занести в таблицу 2.
. Опыт повторить не менее пяти раз для каждой из опор. Результаты занести в таблицу 2.
Результаты опытов с физическим маятником Таблица 2
| № п/п |
| п |
|
| п | 
| 
|
|
|
| . . . . |
Произвести расчет по формуле:  .
.
5. Повторить п. 1-4 не менее 5 раз. Набрать статистику эксперимента. Вычислить среднее значение и погрешность эксперимента .
4. ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ.
ОЦЕНКА ПОГРЕШНОСТИ ИЗМЕРЕНИЙ
Как известно, результат эксперимента представляет вероятное значение измеряемой величины. Погрешности, возникающие в эксперименте, возникают по разным причинам. Во-первых, это неправильная организация эксперимента, нарушение методики его проведения. Второй причиной является погрешность используемой модели. Рассмотрим опыт с так называемым «математическим» маятником. Маятник, представляемый как математический, на самом деле близок к физическому. Его момент инерции относительно точки подвеса  , где R - радиус шарика, - длина нити. Если маятник рассматривать как материальную точку, его момент инерции
, где R - радиус шарика, - длина нити. Если маятник рассматривать как материальную точку, его момент инерции  . Периоды колебаний этих маятников будут различны,
. Периоды колебаний этих маятников будут различны,  ,
,  , где
, где  - расстояние от точки подвеса до центра масс маятники. Очевидно, относительная погрешность модели
- расстояние от точки подвеса до центра масс маятники. Очевидно, относительная погрешность модели
 .
.
Нить, на которой подвешен шарик, нельзя считать нерастяжимой. Если нить претерпевает только упругие удлинения, подчиняющиеся закону Гука, возникает еще одна степень свободы – колебание длины маятника, и следует рассматривать колебания двумерного осциллятора. Если амплитуды колебаний значительные, упругую силу нельзя уже считать пропорциональной удлинению нити, зависимость силы от удлинения оказывается пропорциональной квадрату, кубу и т.д. от величины удлинения,  , и колебания будут ангармоническими. Если рассматривать колебания за большой промежуток времени (время 20-30 колебаний), начнет сказываться затухание. Таким образом, используемая в работе модель является применимой при малых колебаниях (амплитуды 3-5◦ и длина нити много больше радиуса шарика) и при малых интервалах времени исследования процесса. При обработке результатов экспериментов следует иметь в виду, что дополнительным источником погрешности является невоспроизводимость условий наблюдений. Поэтому рекомендуется определить значение для каждого отдельного опыта, набрать статистику результатов не менее 5– 6; затем найти среднее значение и среднюю ошибку результата.
, и колебания будут ангармоническими. Если рассматривать колебания за большой промежуток времени (время 20-30 колебаний), начнет сказываться затухание. Таким образом, используемая в работе модель является применимой при малых колебаниях (амплитуды 3-5◦ и длина нити много больше радиуса шарика) и при малых интервалах времени исследования процесса. При обработке результатов экспериментов следует иметь в виду, что дополнительным источником погрешности является невоспроизводимость условий наблюдений. Поэтому рекомендуется определить значение для каждого отдельного опыта, набрать статистику результатов не менее 5– 6; затем найти среднее значение и среднюю ошибку результата.
Аналогичное замечание можно сделать и для физического маятника. Легко видеть, что ошибки модели здесь проявляются в меньшей степени. Следует соблюсти условие малости амплитуд колебаний. Обработка результатов производится так же, как и для математического маятника.
5. ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ ОТЧЕТА
Отчет по лабораторной работе должен содержать название и номер работы, формулировку цели, перечень приборов и оборудования, рисунок экспериментальной установки (схематический), расчетные формулы, таблицы результатов и расчетов.
6. КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Какие процессы называют колебательными?
2. Какие колебания называют гармоническими? Перечислите их основные характеристики.
3. Дайте определение математического маятника. Выведите уравнение его движения.
4. Основные особенности малых колебаний математического маятника.
5. Дайте определение физического маятника. Выведите уравнение его движения.
6. Какая особенность конструкции физического маятника реализована в данном приборе?
7. Расскажите о природе измеряемой величины и ее значении для практики.
8. Какое из определений является на Ваш взгляд более точным и почему?
7. ЛИТЕРАТУРА
1. Савельев, И.В. Курс общей физики.В 3 – х т. [Текст]: Учебное пособие / И. В. Савельев. – Изд.5–е,стереотип. – СПб.: Изд–во “Лань”, 2006.- 512с. – Т.1. – § 49, 50, 53 – 54.
2. Иродов И.Е. Волновая механика. Основные законы [Текст]/ И.Е.Иродов.– М.: Лаборатория Базовых Знаний, 2001–256 с.
| <== предыдущая лекция | | | следующая лекция ==> |
| Содержит пшеницу, глютен, продукты яичные, молочные продукты, лецитин соевый. | | | Первый множитель в (6) обращается в нуль в точках, для которых |
Не нашли, что искали? Воспользуйтесь поиском: