ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Готовые кабели MOTION ‑ CONNECT Используются, если датчики положения двигателей без интерфейса DRIVE – CLiQ подключаются к сенсорным модулям. 2 страница
Исходя из настройки контура на модульный оптимум, регулятор  будет компенсировать часть объекта
будет компенсировать часть объекта
 . (2.74)
. (2.74)
Тогда передаточная функция регулятора потокосцепления может быть определена следующим образом
 . (2.75)
. (2.75)
Таким образом, исходя из формулы (2.75), регулятор потокосцепления также будет пропорционально-интегральным.
Настроим контур регулирования электромагнитного момента двигателя. Считая, что в системе установлено номинальное потокосцепления, упростим структурную схему, заменив нелинейные блоки в канале регулирования скорости коэффициентами с множителями, равными установленном потокосцепления. Упрощенная структурная схема приведена на рисунке 2.32. Исходя из нее, контур момента можно представить в виде, показанном на рисунке 2.33. По аналогии с формулой (2.73) замкнутый контур тока по оси q можно представить в виде
 . (2.76)
. (2.76)
Объект контура момента (рисунок 2.33) не имеет больших постоянных времени. Его передаточная функция будет иметь вид
 . (2.77)
. (2.77)
Так как в контуре потокосцепления, некомпенсированная постоянная времени контура момента состави  . Для настройки контура, не имеющего больших постоянных времени, следует применить интегральный регулятор с передаточной функцией
. Для настройки контура, не имеющего больших постоянных времени, следует применить интегральный регулятор с передаточной функцией
 , (2.78)
, (2.78)
где  – динамический коэффициент регулятора момента, может быть рассчитан следующим образом
– динамический коэффициент регулятора момента, может быть рассчитан следующим образом
 . (2.79)
. (2.79)

Рисунок 2.33 – Структурная схема контура момента
Тогда передаточная функция регулятора момента будет такой
 .(2.80)
.(2.80)
Выполним настройку контура скорости. Объект регулирования для этого контура будет иметь интегрирующие свойства, поэтому для настройки применим ПИ-регулятор с такой передаточной функцией
 , (2.81)
, (2.81)
где  – постоянная времени регулятора скорости;
– постоянная времени регулятора скорости;
 – динамический коэффициет регулирования скорости, может быть рассчитанный следующим образом
– динамический коэффициет регулирования скорости, может быть рассчитанный следующим образом
 . (2.82)
. (2.82)


Откуда
 , (2.83)
, (2.83)
2.9.4 Расчет коэффициентов регуляторов тока, потокосцепления ротора, момента и скорости
Используя формулу (2.72) и данные из таблицы 2.8, определим коэффициенты регуляторов тока по оси d и по оси q
 .
.
По формуле (2.75) находим коэффициенты регулятора потокосцепления
 .
.
Рассчитаем динамический коэффициент регулятора момента по формуле (2.79)
 .
.
Тогда регулятор момента будет иметь передаточную функцию
 .
.
Динамический коэффициент регулятора скорости
 .
.
Исходные данные, необходимые для расчета коэффициентов регуляторов для наглядности занесены в таблицу 2.8 (большинство из них определена в пункте 2.3).
Таблица 2.8 – Исходные данные для расчета коэффициентов регуляторов
| № п/п | Наименование параметра | Условное обозначение ичисленное значение параметра |
| Постоянная времени ротора |  с с
| |
| Приведенная постоянная времени ротора |  с с
| |
| Активное сопротивление статора |  Ом Ом
| |
| Приведеное активное сопротивление ротора |  Ом Ом
| |
| Номинальный ток фазы статора | Iн = 438,9 А | |
| Номинальная фазное напряжение |  В В
| |
| Напряжение задания на преобразователь |  В В
| |
| Коэффициент передачи преобразователя | 
| |
| Коэффициент передачи датчика тока |  
| |
| Наименьшая некомпенсированная постоянная времени в контуре тока при частоте ШИМ – превращение 4 кГц |  с с
| |
| Индуктивность главного магнитного контура |  Гн Гн
| |
| Номинальное потокосцепление |  Вб Вб
| |
| Коэффициент передачи датчика потокосцепления |  
| |
| Наименьшая некомпенсированная постоянная времени в контуре потокосцепления |  с с
| |
| Коэффициент передачи датчика момента | 
| |
| Наименьшая некомпенсированная постоянная времени в контуре момента |  с с
| |
| Коэффициент передачи датчика скорости |  
| |
| Наименьшая некомпенсированная постоянная времени в контуре скорости |  с с
|
Постоянная времени регулятора скорости
 с.
с.
Передаточная функция регулятора скорости
 .
.
2.9.5 Моделирование базовой электромеханической системы с векторным управлением при постоянном значении потокосцепления ротора
Используя модель асинхронного двигателя в двухфазной системе координат (d – q) с учетом жесткости эксцентрикового вала в виде маскированной подсистемы в MATLAB Simulink (рисунок 2.25), а также структурная схема электромеханической системы с векторным управлением (рисунок 2.38), составим модель базовой электромеханической системы с векторным управлением при постоянном значении потокосцепления ротора (рисунок 2.43). Настройка регуляторов возьмем из пункта 2.9.4.
Модель двигателя, используемого в модели, приведенной на рисунке 2.43, отличается от показанной на рисунке 2.25 наличием входного порта для подключения момента статической нагрузки, а также наличием выходного порта psi для контроля потокосцепления ротора (рисунок 2.44).
Номинальное напряжение задания преобразователя при моделировании будем считать равным В. Учитывая тахограму, которую должен отрабатывать привод, возьмем продолжительность нарастания сигнала в задатчик интенсивности меньше наименьшее время разгона и торможения (менее 0,35 с) – 0,05 с. Маскированная подсистема задатчик интенсивности приведена на рисунке 2.45.





Рисунок 2.37 – Модель задатчика интенсивности в MATLAB Simulink
Напряжение на выходе задатчик интенсивности нарастает за 0,05 с до заданного значения 5 В (рисунок 2.46) – снимается с блока Out_zadav (рисунок 2.43). При этом блок Uzpsi формирует ступенчатый сигнал без задержки, а блок Uzsh – с задержкой на время достижения задачей за потокосцепления номинального значения, то есть на 0,05 с. На рисунках 2.47 – 2.50 приведены переходные процессы по основным координатами электропривода при пуске без нагрузки. Ток статора, как и в предыдущих моделях, рассчитывается как корень квадратный из суммы квадратов проекций на оси (d – q).

Рисунок 2.38 – Напряжение на выходе подсистемы задатчик интенсивности

Рисунок 2.39 – Изменение момента в электромеханической системе с векторнымуправлением при пуске в холостом режиме

Рисунок 2.40 – Изменение действующего значения тока статора вэлектромеханической системе с векторным управлением
при пуске в холостом режиме
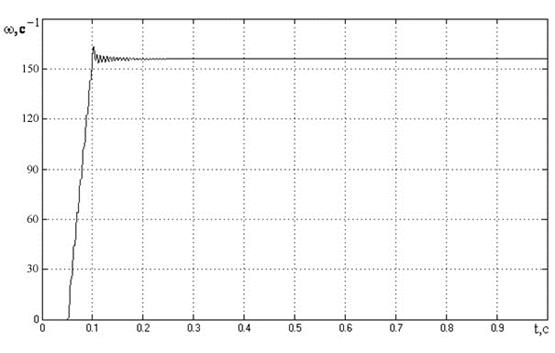
Рисунок 2.41 – Переходная функция по скорости в электромеханической системе с векторным управлением при пуске в холостом режиме

Рисунок 2.42 – Переходная функция по потокосцепления ротора в
электромеханической системе с векторным управлением при пуске
в холостом режиме
Анализируя полученные динамические характеристики можно сделать вывод, что быстродействие системы с векторным управлением при пуске оказалась значительно выше быстродействие асинхронного двигателя, включается в трехфазную сеть. Так, продолжительность переходного процесса по скорости в электромеханической системе с векторным управлением составляет около 0,12 с, тогда как в электромеханической системе без векторного управления она равнялась 17 с, т.е. быстродействие увеличивается в 141 раз. Это говорит о компенсации больших постоянных времени электропривода с помощью регуляторов. При этом перерегулирования по скорости составляет 4,6%, что является допустимым для технологического процесса (рисунок 2.49).
Из зависимостей, приведенных на рисунках 2.47 и 2.48, можно сделать вывод, что максимальное значение пускового момента не превышает допустимое в  . Максимальное значение тока при пуске составляет 3080 А. Оно также не превышает допустимого значения токовой перегрузки в
. Максимальное значение тока при пуске составляет 3080 А. Оно также не превышает допустимого значения токовой перегрузки в  А. Поэтому условия пуска можно считать приемлемыми.
А. Поэтому условия пуска можно считать приемлемыми.
С переходной функции по потокосцепления ротора можно заключить, что оно поддерживается на номинальном уровне  Вб. Это значение в базовой электромеханической системе не является функционально связанным с моментом нагрузки, прилагаемое к валу двигателя. Исследование энергопотребления базовой электромеханической системы при работе в условиях переменной нагрузки (рисунок 1.12) за необходимой тахограмою (рисунки 2.1, 2.2) проводится в следующем разделе дипломного проекта.
Вб. Это значение в базовой электромеханической системе не является функционально связанным с моментом нагрузки, прилагаемое к валу двигателя. Исследование энергопотребления базовой электромеханической системы при работе в условиях переменной нагрузки (рисунок 1.12) за необходимой тахограмою (рисунки 2.1, 2.2) проводится в следующем разделе дипломного проекта.
2.9.6 Статические характеристики базовой электромеханической системы с векторным управлением при постоянном значении потокосцепления ротора
Передаточная функция контура скорости с учетом упрощений, описанных в пунктах 2.9.2 – 2.9.4 может быть представлена в таком виде

Откуда получим
 (2.84)
(2.84)
В статических режимах работы частоты изменения входных сигналов и сигналов возмущения равняется нулю, поэтому  . В статическом режиме работы передаточная функция системы приближенная к величине, обратной к коеффициенту обратной связи по скорости. По формуле (2.84) получим
. В статическом режиме работы передаточная функция системы приближенная к величине, обратной к коеффициенту обратной связи по скорости. По формуле (2.84) получим
 (2.85)
(2.85)
Номинальному напряжению задания В соответствует скорость  с-1, а при снижении напряжения задания в замкнутой системе скорость также пропорционально снижается. Так, напряжению задания
с-1, а при снижении напряжения задания в замкнутой системе скорость также пропорционально снижается. Так, напряжению задания  В соответствует
В соответствует  с-1. В замкнутой системе с векторным управлением механические характеристики будут абсолютно жесткими (будут проходить параллельно к оси момента), потому что в контуре скорости используется ПИ-регулятор (рисунок 2.51).
с-1. В замкнутой системе с векторным управлением механические характеристики будут абсолютно жесткими (будут проходить параллельно к оси момента), потому что в контуре скорости используется ПИ-регулятор (рисунок 2.51).

Рисунок 2.43 – Статические характеристики замкнутойэлектромеханической системы с векторным управлением
Статические характеристики на рисунке 2.51 построены для пяти разных значений напряжения задания, начиная от 1 В до 5 В. Все они проходят параллельно с осью момента.
3 СПЕЦИАЛЬНАЯ ЧАСТЬ
3.1 Модернизация системы управления главного привода листоправильной машины
3.1.1 Выбор частотного преобразователя фирмы Omron Yaskawa Motion Control
Общепромышленные преобразователи частоты Omron, с рядом мощностей до 600 кВт, отличаются надежностью и способностью обеспечить высокий пусковой момент и точное регулирование скорости для применения в любой машине или технологической линии. Широкий выбор сетевых интерфейсов, специализированных прошивок и дополнительных плат входов-выходов позволяет использовать общепромышленные преобразователи частоты Omron во всей Европе.
Наиболее подходящим преобразователем к двигателю K21F315L41 является преобразователь частоты Omron CIMR – G7C (инвертор) – выполненный по трехуровневой схеме, на напряжение 400 В. Это схемное решение Omron G7 сводит к минимуму проблемы, связанные с коммутацией IGBT-транзисторов (кабели очень большой длины, подшипниковые токи и синфазные токи) и защищает систему “двигатель-привод” в целом.
Omron CIMR – G7C первый в мире инвертор выполненный по трёхуровневой схеме. Преимуществами преобразователей Omron CIMR – G7C являются:
– трёхуровневое управление (класс 400В);
– векторное регулирование тока и вольт-частотное регулирование (V/F) с датчиком или без датчика;
– бесшумная работа;
– автоподстройка с вращением или без вращения;
– торможение с повышенным скольжением;
– функция энергосбережения;
– панель управления с жидкокристаллическим дисплеем;
– дополнительная карта с функциями ПЛК;
– стандартный пртокол связи Modbus(RS-485);
– дополнительныеинтерфейсысвязи: DeviceNet, Profibus, CANOpen, LONworks, Ethernet;
– программные средства для конфигурирования на ПК: CX-Drive и DriveWorksEZ;
– специализированное прикладное программное обеспечение.
Ниже приведены некоторые технические данные преобразователя Omron CIMR – G7C4300:
Таблица 3.1 – Технические параметры преобразователя Omron CIMR – G7C4300:
| Omron CIMR – G7C4300 | Характеристики |
| Метод регулирования | ШИМ с синусоидаоьной ШИМ с синусоидальной огибающей. Векторное регулирование с замкнутым контуром, векторное регулирование 1/2 с разомкнутым контуром, вольт-частотное регулирование (V/f), вольт-частотное регулирование (V/f) с датчиком (PG) |
| Характеристики вращающего момента | 150 % при 0,3 Гц (векторное регулирование 2 с разомкнутым контуром) 150 % при 0 об/мин (векторное регулирование с замкнутым контуром) |
| Диапазон регулирования скорости | 1:200 (векторное регулирование 2 с разомкнутым контуром) 1:1000 (векторное регулирование с замкнутым контуром) |
Продолжение таблицы 3.1
| Omron CIMR – G7C4300 | Характеристики |
| Погрешность регулирования скорости | ± 0,2 % (векторное регулирование с разомкнутым контуром) ± 0,02 % (векторное регулирование с замкнутым контуром)(25°C ± 10°C) |
| Реакция на управляющее воздействие по скорости | 10 Гц (векторное регулирование 2 с разомкнутым контуром) 30 Гц (регулирование с датчиком (PG)) |
| Ограничение вращающего момента | Предусмотрено (отдельно для каждого из 4 секторов путем настройки констант) (Векторное регулирование |
| Погрешность регулирования вращающего момента | ± 5 % |
| Диапазон частот | от 0,01 до 400 Гц |
| Погрешность частоты (температурная характеристика) | Цифровое задание частоты: ± 0,01 % (–10°C...+40°C) Аналоговое задание частоты: ± 0,1 % (25°C ± 10°C) |
| Минимальный шаг (разрешение) установки частоты | Цифровое задание частоты: 0,01 Гц Аналоговое задание частоты: 0,025 Гц/50 Гц (11 разрядов + знак) |
| Разрешение по выходной частоте | 0,001 Гц |
| Перегрузочная способность и максимальный ток | 150 % от номинального выходного тока в течение 1 минуты 200 от номинального выходного тока в течение 0,5 с |
| Сигнал задания частоты | 0... +10 В; –10... +10 В; 4... 20 мA; импульсная последовательность |
| Время разгона/торможения | 0,01...6000,0 с (выбор одной из 4-х комбинаций независимых значений времени разгона и времени торможения) |
| Тормозной момент | Около 20 % (приблиз. 125 % при использовании тормозного резистора, тормозного транзистора, встроенного в инверторы мощностью 15 кВт. |
| Защита двигателя | Защита от перегрева при помощи электронного теплового реле. |
| Защитное заземление | Защита обеспечивается электронными схемами. |
3.1.2 Выбор сетевых силовых компонентов:
Сетевые силовые компоненты используются для защиты подключенных компонентов от динамического или длительного перенапряжения и для того, чтобы соблюдались предписанные предельные значения.
Вместе с сетевыми дросселями и согласованной структурой системы сетевые фильтры ограничивают кондуктивные помехи, создаваемые силовыми модулями до значений, допустимых для промышленных блоков питания на месте монтажа. Сетевые фильтры подходят только для прямого подключения к сетям TN (заземление). Выбираем сетевой фильтр марки 3G3RV – PF13060 – SE с таким параметрами:
– номинальная мощность базового модуля питания – 710 кВт;
– номинальный ток – 1600 А;
– потери мощности – 0,182 кВт;
– напряжение – от 380 до 480 В.
В случае подключения инвертора к силовому трансформатору высокой мощности (600 кВт или более), либо в случае включения в цепь фазокомпенсирующего конденсатора, через входную силовую цепь может протекать ток чрезвычайно высокой амплитуды, который может привести к выходу инвертора из строя. Для защиты инвертора на его входе можно дополнительно подключить дроссель переменного тока, либо подключить к соответствующим клеммам дроссель постоянного тока. Дроссель также позволяет снизить коэффициент мощности входного напряжения.Выберу сетевой дроссель 3G3RV – PFI3800 – SE с таким параметрами: номинальная мощность подачи сетевого модуля – 400 кВт; максимальный ток по нагреву – 773 А; потери мощности – 0,31 кВт, напряжение – 400 В.
3.1.3 Дополнительные компоненты
К дополнительным компонентам частотного преобразователя относят: карты контроля, карты обратной связи для регулирования скорости,дополнительные карты связи, карты для ввода задания, карты с функциями ПЛК,дополнительные принадлежности.
Вибираем карту аналоговых выходов контроля AO-08/3G3IV-PAO08. Она выдает аналоговый сигнал для контроля выходных параметров инвертора (выходной частоты, выходного тока и т.д.) после преобразования абсолютных значений. Имеет следующие параметры:
– разрешение выхода: 8 бит (1/256);
– выходное напряжение: 0... 10 В (без гальванической развязки);
– число выходных каналов: 2 канала.
В качестве карты дискретных выходов выберем карту марки DO–08/3G3IV– PDO08. Её дискретный выход с гальванической развязкой служит для сигнализации рабочего состояния инвертора (сигнал предупреждения, обнаружение нулевой скорости и т.д.) и имеет следующие характеристики:
– выходы:6 выходов с оптронной развязкой (48 В, до 50 мA);
– 2 релейных выхода;
– токи (250 В~, до 1 A, 30 В=, до 1 A).
Карта релейных двухконтактных выходов марки DO-02C/3G3IV-PDO02C. Помимо собственных выходных контактов инвертора могут использоваться два многофункциональных выходных контакта (контакты двухконтактного реле).
Карта обратной связи марки PG–A2/3G3FV–PPGA2 для регулирования скорости используется для V/f–регулирования с использованием датчика (PG)или для векторного регулирования магнитного потока.Имеет следующие функции:
– Входы для импульсных каналов А (для датчиков с одним импульсным выходом);
– диапазон частот импульсного датчика (PG): Макс. 30 кГц (приблиз.);
– выход источника питания датчика: +12 В, макс. ток 200 мA;
– выход контроля импульсов: +12 В, 20 мА.
Дополнительная карта интерфейса Profibus–DP SI – P1 служит для запуска или остановки инвертора, для настройки параметров и ввода заданий, а также для контроля выходной частоты, выходного тока и тому подобных параметров на стороне центрального контроллера по сети Profibus-DP.
Дополнительная карта интерфейса DeviceNet SI – N1 служит для запуска или остановки инвертора, для настройки параметров и ввода заданий, а также для контроля выходной частоты, выходного тока и тому подобных параметров на стороне центрального контроллера по сети DeviceNet.
Дополнительная карта интерфейса Ethernet CM090 – это устройство, поддерживающее связь по протоколу Modbus через TCP/IP Ethernet
Дополнительные карты для ввода задания:
1) Карта с двумя аналоговыми входами с высоким разрешением
– канал 1: 0... 10 В (20 кОм);
– канал 2: 4... 20 мA (250 Ом);
– разрешение 14 бит.
2) Карта цифрового задания скорости DI–16H2/3G3IV–PDI16H2 бывает 8–разрядной и 16–ти разрядной.
Карта с функциями ПЛК и поддержкой DeviceNet 3G3RV–P10ST8–DRT-E имеет следующие функции:
– встроенная шина Compubus/S;
– для программирования можно использовать стандартные средства Omron;
3.1.4 Выбор тормозного блока
Тормозной модуль (и внешний тормозной резистор) необходим для приведения приводов в состояние управляемого останова в случае короткого замыкания сети (например, аварийный отвод) или для ограничения напряжения сети DC во время кратковременной рекуперации, если, например, способность сетевых модулей к рекуперации была отключена или установлена в пол полной мере. Устанавливаем тормозной модуль CDBR 4220B. К нему подбираем тормозной резистор LKEB 4045 9600 Вт 13,6 Ом.
На рисунке 3.1 представлена схема подключения Omron CIMR – G7C4300

Рисунок 3.1 – Схема подключения инвертора Omron CIMR – G7C4300
3.2 Моделирование динамических режимов работы электромеханической системы листоправильной машины при отработке тахограмм технологического процесса правки металла с учетом изменения статического момента нагрузки и момента инерции
3.2.1 Обработка экспериментальных данных, что касается изменения статического момента нагрузки и момента инерции во время правки
В предыдущем разделе было выполнено моделирование электромеханической системы листоправильной машины с векторным управлением для стана холодной прокатки 2700 При этом не учитывались технологические особенности работы установки, которые представляються тахограммами изменения скорости, показаннями на рисунках 2.1 и 2.2
Для моделирования тахограмм можно использовать блок Signal Builder со среды MATLAB Simulink. Этот блок позволяет сформировать сигнал задания по набору точек, промежутки между которыми заполняются прямолинейными орезками (рисунки 3.1, 3.2).
Тахограмма на рисунке 3.1 отвечает прокатке полосы шириной 1600 мм, которая двигается со скоростью  м/с, на листы длиной 2 м. При этом привод полностью не останавливается, а только снижает скорость вращения после очередной правки. В блоке Signal Builder заданы два цикла правки.
м/с, на листы длиной 2 м. При этом привод полностью не останавливается, а только снижает скорость вращения после очередной правки. В блоке Signal Builder заданы два цикла правки.
На рисунке 3.2 изображен процесс правки полосы, который изменяется в зависимости от количества рабочих роликов. Посля завершения правки привод останавливается.

Рисунок 3.2 – Тахограмма работы электропривода листоправильной машины для полосы шириной 1600 мм, которая движется со скоростью 1 м/с при длине листа 2 м, задана в блоке Signal Builder

Рисунок 3.2 – Тахограмма работы электропривода листоправильной машины для полосы шириной 1600 мм, которая движется со скоростью 1 м/с с остановкой после каждого цикла правки, задана в блоке Signal Builder
Для учета изменения статического момента сформируем функцию, которая соответствует рисунку 1.12. Приведение этого момента к валу двигателя и перевод его в систему СИ можно воспользоваться формулой
Не нашли, что искали? Воспользуйтесь поиском: