ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Миноp 0 - поpядка .000099454
Перечень ссылок
Приложение А
ВВЕДЕНИЕ
Увеличение объема промышленного производства, повышение производительности и улучшение условий труда при постоянном росте уровня техники безопасности являются одними из важнейших задач, решение которых без широкой автоматизации производства невозможно. В основе расчета и функционирования автоматических систем лежит теория автоматического управления.
Управление охватывает большой круг задач. Под автоматическим управлением понимается автоматическое осуществление совокупности воздействий, выбранных из ряда возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с заданным алгоритмом без непосредственного участия человека.
Объектами управления могут быть машины, механизмы, комплексы, добычные и подготовительные участки, передвижные и стационарные установки, конвейерные линии, коллективы людей, производственные предприятия.
В зависимости от объектов и задач управления системы управления могут быть различными от самых простых систем автоматического регулирования (САР), поддерживающие неизменной какую-либо величину, до сложных, содержащих десятки вычислительных машин и решающих задачи оптимального управления множеством объектов.
Одним из направлений технического процесса в угольной промышленности является широкое внедрение систем и средств автоматизации очистного оборудования и в первую очередь, очистных комбайнов.
Автоматизация режимов работы очистных комбайнов обеспечивает повышение их производительности благодаря более полному использованию энергетических возможностей электропривода и уменьшенную вероятности «опрокидывания» электродвигателей, повышение долговечности из-за снижения перегрузок электродвигателя и механической части и их аварийности; улучшает условия и повышает безопасность труда, так как позволяет обслуживающему персоналу выполнять основные операции, находясь в закрепленном пространстве на свежей струе, что входит в задачи и цель данной курсовой работы.
1 ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА И ОПИСАНИЕ ЕЁ РАБОТЫ
Принципиальная электрическая схема представлена на рисунке 1.1 и является системой регулирования угловой скорости асинхронного двигателя с короткозамкнутым ротором со статическим тиристорным преобразователем частоты в цепи статора.
Схема регулирования включает: магнитный усилитель с глубокой отрицательной обратной связью и обмоткой смещения системы управления инвертором, блока питания, АД с короткозамкнутым ротором, подающей части с редуктором, цепями обратной связью с трансформаторами тока и тахогенератора с выпрямительными мостами, задающим потенциометром.
1. 1 Основные блоки схемы
Магнитный усилитель (МУ) предназначен для поддержания постоянства соотношения между нагрузкой двигателя и скоростью подачи комбайна и усиления сигнала на входе станции управления инвертора (СУИ).
Станция управления инверторами предназначена для преобразования постоянного тока в трехфазное напряжение регулируемой частоты.
Блок питания предназначен для преобразования переменного тока с частотой 50 Гц в постоянный ток и регулирования выпрямленного напряжения. Он состоит из управляемого вентиля и станции управления вентилями (СУВ).
 |
Рисунок 1.1- Схема электрическая принципиальная
Двигатель (Д) предназначен для воздействия на исполнительный орган и механизм подачи. В свою очередь, механизм подачи (МП) с редуктором (Р) предназначены для передачи угловой скорости ротора асинхронного двигателя к приводной звездочке комбайна. Исполнительный орган (ИО) предназначен для разрушения угольного массива. Режущая часть (РЧ) предназначена для передачи электродвижущего момента от двигателя к исполнительному органу для преодоления сил резания.
Датчик нагрузки (ДН) предназначен для преобразования тока нагрузки двигателя в пропорциональное напряжение постоянного тока. Датчик скорости (ДС) предназначен для преобразования скорости перемещения комбайна в напряжение постоянного тока. Взаимодействие блоков схемы и принцип действия системы состоит в следующем: регулирование угловой скорости асинхронного двигателя с короткозамкнутым ротором осуществлено на базе схемы со статическим преобразователем частоты в цепи статора, выполненном на базе полупроводниковых элементов (тиристорных). Применение такой схемы позволяет повысить КПД установки, уменьшить ее габариты, а также увеличить быстродействие. При изменении частоты изменяется не только синхронная угловая скорость двигателя, но и его критический момент и критическое скольжение. Если пренебречь активным сопротивлением статора двигателя, формулы:
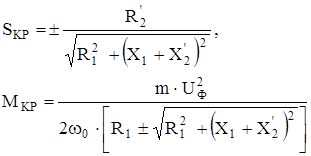
примут вид: 
где f1 – частота тока питающей сети;
m – число фаз;
ω0 – угловая скорость магнитного поля статора:
ω 0=2πf1/P;
где Р – число пар полюсов двигателя;
Uф – вектор фазного напряжения сети;
R1, R2,  , Х1,
, Х1,  – активные и индуктивные сопротивления однофазной схемы замещения асинхронного двигателя.
– активные и индуктивные сопротивления однофазной схемы замещения асинхронного двигателя.
Таким образом, с изменением частоты тока сети f1 можно изменить перегрузочную способность двигателя. Cохранение постоянной перегрузочной способности двигателя осуществлено одновременным изменением величины подводимого напряжения и частоты тока по закону:
U/f1=const. (1.1)
Вспомогательным звеном в поддержании постоянства соотношения (1.1) является магнитный усилитель, выход которого подан на вход станции управления инвертором. Величина тока нагрузки МУ определяется соотношением мощности, потребляемой асинхронным двигателем Р, и скорости подачи комбайна Vп. Изменение мощности отрабатывается цепью обратной связью МУ, а скорость подачи – цепью сравнения с управляющей обмотки wу магнитного усилителя. Это соотношение предписывается по закону Р/Vп = min – минимальных затрат электроэнергии путем регулирования потенциометра П и резисторов Rз, R4 в цепи обмотки управления и обратной связи МУ.
Измерителями нагрузки и скорости подачи являются соответственно трансформаторы тока ТТ1 и ТТ2 и тахогенераторный датчик ТГ.
Работа схемы (рис.1.1) состоит в следующем. При изменении нагрузки на исполнительном органе меняется момент статический на валу режущей части и асинхронного двигателя, а следовательно, напряжение на резисторах Rз и R4; пропорциональное току нагрузки двигателя, измеряемое ТТ1 и ТТ2. Это значение напряжения, прикладываемое к обмотке обратной связи МУ, подмагничивая сердечники и индуктивное сопротивление рабочих обмоток Wр1 уменьшается. Сигнал на входе СУИ изменяется, что приводит к изменению частоты тока, питающей двигатель сети. Преобразование питающего двигатель напряжения обеспечивает управляемый выпрямитель УВ.
Система СУИ производит преобразование постоянного тока в трехфазное напряжение регулируемой частоты, осуществляется переключением тиристоров в плечах моста с заданной частотой и в определенной последовательности. Неотъемлемой частью тиристорных инверторов являются устройства принудительной коммутации, предназначенные для запирания тиристоров. Роль последних выполняют коммутирующие конденсаторы С1 - С6. Диоды Д1 - Д6 защищают коммутирующие конденсаторы от нагрева, что позволяет уменьшить их емкость и устранить их влияние на напряжение нагрузки. Диоды Д7 – Д12 пропускают реактивно отстающий ток нагрузки в те моменты времени, когда знаки тока и момента не совпадают. При этом за счет самоиндукции или ЭДС обмотки статора соответствующий диод этого моста открывается и спадающим током нагрузки производит перезаряд конденсатора С0. Дроссели L1 и L2 ограничивают ток разряда конденсаторов С1 - С 6. С изменением частоты f1 и напряжения Uф изменяется угловая скорость ротора двигателя ωд. Напряжение на выходе тахогенератора, преобразованное в напряжение постоянного тока (мост В1 и емкость С2), пропорционально ωд, включено встречно с задаваемым UЗ. Разность рассогласования:
Е = UТГ - UЗ
воздействует на обмотку управления Wy магнитного усилителя. В результате изменяется индуктивное сопротивление рабочих обмоток и происходит корректировка по скорости подачи. Последняя устанавливается в соответствии с моментом сопротивления Мс и соблюдением соотношения
Р / Vп = min
и заданных значений на потенциометре П и резисторах R3, R4.
Таким образом, частотное регулирование электропривода комбайна позволяет повысить его эксплуатационную производительность, обеспечить плавность и оптимальные зоны управления.
2 ФУНКЦИОНАЛЬНАЯ СХЕМА САУ И ЕЕ ОСОБЕННОСТИ

Построение функциональной схемы следует вести, базируясь на принципиальной схеме и группировании ее исполнительных элементов в функциональные блоки, разделенные входными и выходными сигналами, несущими смысловую информацию.
где УО – управляемый объект (горная машина):
АД – асинхронный двигатель;
РЧ – режущая часть;
ИО – исполнительный орган;
МП – механизм подачи с редуктором;
МУ – магнитный усилитель;
СУИ – станция управления инверторами;
ДС – датчик скорости перемещения;
ДН – датчик тока нагрузки.
Рисунок 2.1 – Функциональная схема САУ
В отличие от известных способов в регулировании нагрузки двигателя комбайна через управление скоростью перемещения, в приведенной функциональной схеме отсутствует гидравлическая подающая часть.
Эту функцию, наряду с процессом резания выполняет асинхронный двигатель с короткозамкнутым ротором, управление которым осуществляется с учетом изменения, как нагрузки, так и скорости подачи комбайна.
3 СТРУКТУРНАЯ СХЕМА САУ
Структурная схема САУ представляет собой совокупность звеньев, описываемых элементарными алгоритмами. Взаимодействие между звеньями определено в соответствии с направлением прохождения управляющего и возмущающего воздействия.
На рисунке 3.1 приведены следующие условные обозначения:
Кму (р), Ксу (р), Кд (р), Кмп (р), Кио (р), Крч (р), Кдс (р), Ктт (р)-
передаточные функции магнитного усилителя, станции управления, двигателя комбайна, механизма подачи, исполнительного органа, режущей части, датчика тока нагрузки двигателя комбайна соответственно;
UЗ – задающее значение угловой скорости ротора двигателя комбайна;
ε – ошибка рассогласования заданного и измеренного значения контролируемых величин;

Рисунок 3.1 – Структурная схема САУ
IН – ток в цепи нагрузки магнитного усилителя.
S – скольжение ротора относительно статора;
М – момент сопротивления на валу двигателя;
F – частота напряжения в цепи статора двигателя комбайна;
МС – момент сопротивления на валу исполнительного органа;
VП– скорость подачи (перемещения) двигателя;
ωД – угловая скорость вращения вала двигателя комбайна;
I – ток нагрузки двигателя комбайна;
UV – напряжение пропорциональное скорости подачи комбайна;
UI – напряжение пропорциональное току нагрузки комбайна;
U3 – задающее значение угловой скорости ротора двигателя комбайна.
С целью получения передаточной функции САУ необходимо после замены коэффициентов передаточных функций звеньев их конкретными значениями преобразовать структуру, воспользовавшись правилами переноса точек съема сигналов и суммирования вокруг соответствующих звеньев.
4 ПЕРЕДАТОЧНАЯ И КОМПЛЕКСНО-ЧАСТОТНАЯ ФУНКЦИЯ САУ
4.1 Магнитный усилитель и его передаточная и частотная
характеристики
Магнитный усилитель можно представить инерционным звеном первого порядка с передаточной функцией вида:
 ,
,
где Кму – статический коэффициент усиления магнитного усилителя;
Тму – постоянная времени магнитного усилителя.
Комплексно – частотная функция магнитного усилителя:

4.2 Станция управления инверторами и его передаточная и
комплексно – частотная функция
Станцию управления инверторами можно представить инерционным звеном первого порядка с передаточной функцией вида:
 ,
,
где Ксу – статический коэффициент усиления СУИ;
Тсу – постоянная времени СУИ.
Комплексно – частотная функция СУИ выглядит так:

4.3 Задающий блок
Узел сравнения реализует алгоритм:
ε = Uз – (Uv + Ui) = Uз – (Кдс · Vп + Кдн · Iд).
В правильно спроектированной системе величина ε должна сводиться к нулю, т.е.:
Uз ≈ (Кдс · Vп + Кдн · Iд).
4.4 Тахогенератор и его передаточная и комплексно – частотная
функции
Передаточная функция тахогенератора имеет вид безынерционного звена:

Комплексно – частотная функция тахогенератора имеет вид:

4.5 Асинхронный двигатель и его передаточная и комплексно –
частотная функции
По управляющему действию передаточная и комплексно – передаточная функции асинхронного двигателя имеют вид:

т.е. отношение скольжения от статического момента:
 (4.1)
(4.1)
где ωс = 2π · f – угловая частота сети;
N - число пар полюсов электродвигателя (вариант задания);
J- момент инерции привода, приведенный к валу двигателя:
J = JР + JРЧ,
где JР - момент инерции ротора электродвигателя, кГм2 (вариант задания);
JРЧ - суммарный момент инерции режущей части, кГм2 .
Диапазон (1.2 ÷ 1.7) кГм2, при этом должно быть соблюдено соотношение:
JРЧ = (1.1 ÷ 1.25) JР;
Тм – механическая постоянная времени:

где SК – критическое скольжение (вариант задания);
МК – максимальный критический вращающий момент электродвигателя, или момент, соответствующий критическому скольжению, Н·м (вариант задания);
Кд - статический коэффициент усиления асинхронного двигателя;
Тэ – электрическая постоянная времени:
 (вариант задания).
(вариант задания).
Передаточная и комплексно-частотная функции по возмущающему воздействию формируется контуром обратной связи по статическому моменту и усилиям резания, возникающим на исполнительном органе. Для этого контура входным возмущающим воздействием можно считать МС или пропорциональное ему значение тока нагрузки, т.е.:
 (4.2)
(4.2)
Соотношение (4.2) можно получить из уравнения механической цепи двигателя с учетом его скольжения:
М(р) = -J · (ω/N) · p · S(p) + МС(р),
или
М(jω) = -J · (ω/N) · jω· S(jω) + МС(jω). (4.3)
В выражение (4.3) вместо S(jω) можно подставить (4.1) тогда:
 . (4.4)
. (4.4)
После замены оператора Лапласа на оператор Фурье выражение (4.4) примет вид:  .
.
Полагая, что ток статора меняется пропорционально моменту, можно записать:

или, в комплексной форме:
 ,
,
где КД – коэффициент пропорциональности, можно найти из рабочих характеристик электродвигателя (вариант задания);
I – ток нагрузки электродвигателя, контроль которого производится с помощью трансформатора тока. Напряжение, пропорциональное току нагрузки:
UI = КТТ ·I,
где КТТ – коэффициент усиления блока измерения тока нагрузки (вариант задания).
Полагая, что ток статора меняется пропорционально моменту, запишем:

4. 6 Режущая и подающая части угледобывающего комбайна
Передаточная и комплексно – частотная функции одинаковы:
КРЧ (р) = КРЧ (jω) = КРЧ = 0.95,
где Крч = 1/i,
i – передаточное число редуктора режущей части:
i = ωД / ωИО,
где ωД – угловая скорость вращения вала ротора электродвигателя:
ωД = ω0 · (1– SН),
где ω0 – синхронная угловая частота вращения вала ротора, для комбайнов ω0 = 157 с-1;
SН – номинальное скольжение ротора электродвигателя (вариант задания);
ωИО - угловая скорость вращения исполнительного органа:
ωИО =  ,
,
где VР – скорость резания (вариант задания);
DИО – диаметр исполнительного органа комбайна (вариант задания).
4.7 Передаточная и комплексно – частотная функции исполнительного
органа
Скорость резания и усилия, возникающие на резцах исполнительного органа зависят, в основном, от сопротивляемости угла резанию А и скорости подачи на забой. Поэтому входом исполнительного органа, как звена САУ, можно считать скорость подачи (управляющее воздействие). Выход -скорость резания:

где Киo = 5.0 – коэффициент передачи исполнительного органа (статический коэффициент усиления);
τ – параметр стружкообразования, т.е. время пробега резцом расстояния между двумя соседними положениями резцов в одной линии резания.
КИО = РЧ / VП,
где РЧ – часовая мощность электродвигателя комбайна (вариант задания);
VП – скорость подачи, соответствующая заданному значению сопротивляемости угля резанию А (вариант задания);

где m – число резцов в одной линии резания (вариант задания);
VР – скорость резания (вариант задания).
В целях упрощения расчета принимаем передаточную функцию исполнительного органа равной:
КИО(р) = КИО = 5.0.
4.8 Передаточная и комплексно – частотная функция механизма
перемещения с редуктором
Передаточную функцию можно описать сложным алгоритмом, описывающим движение комбайна.
Условно можно считать, что при цевочном зацеплении и цепном тяговом органе уравнение имеет вид:

где Тмп – постоянная времени механизма перемещения:
Тмп =  ;
;
m – масса комбайна;
Сi – жесткость тягового органа;
β! – коэффициент пропорциональности между толщиной среза угля и составляющей усилия подачи:

где Кf – коэффициент, учитывающий дополнительное сопротивление перемещению комбайна;
β1 – коэффициент, определяемый параметрами резания одиночного резца.
С целью упрощения расчета всей системы следует принять:
Кмп(р) =  Кмп =0.80, или в комплексной форме:
Кмп =0.80, или в комплексной форме:
Кмп(jω) =  Кмп =0.80,
Кмп =0.80,
где Кмп – статический коэффициент усиления механизма подачи с редуктором согласно задания.
4.9 Передаточная и комплексно – частотная функция системы
По структурной схеме (рис. 3.1) из-за наличия перекрестных связей не возможно получить непосредственно по ней передаточную функцию замкнутой системы. Поэтому необходимо по соответствующим правилам перенести точку съема сигнала с выхода на вход блока КМП (р).
Затем заменим структуры с обратной связью и получим передаточные и комплексно – частотные функции системы в разомкнутом и замкнутом состояниях. Предварительно составим алгоритмы, полученные после структурных преобразований Кf (р), КОС (р).
 |
 |
Рисунок 4.1 – Структурная эквивалентная схема САУ
 ≈0.79.
≈0.79.
Передаточная функция эквивалентной обратной связи равна:
Кос(р) = Ктт(р) + Ктг(р) · Кмп(р) = 1+ 1 · 0.80 = 1.80.
Передаточная функция системы в разомкнутом состоянии равна:
 Кму(р) · Ксу(р) · Кд(р) · Кf(р) · Кос(р)=
Кму(р) · Ксу(р) · Кд(р) · Кf(р) · Кос(р)=

 Комплексно-частотная функция системы в разомкнутом состоянии:
Комплексно-частотная функция системы в разомкнутом состоянии:
 Кму(jω) · Ксу(jω) · Кд(jω) · Кf(jω) · Кос(jω). (4.5)
Кму(jω) · Ксу(jω) · Кд(jω) · Кf(jω) · Кос(jω). (4.5)

Передаточная функция системы в замкнутом состоянии:

 (4.6)
(4.6)
Комплексно-частотная функция системы в замкнутом состоянии:
 (4.7)
(4.7)

5АНАЛИЗ устойчивости и определение граничного
коэффициента усиления
5.1 Критерий Гурвица
Для предварительной оценки устойчивости САУ очистного комбайна применим наиболее распространенный из алгебраических критериев – метод Гурвица. Для этого необходимо найти характеристическое уравнение системы в замкнутом состоянии. Полином знаменателя в выражении (4.6), приравненный к нулю, и есть характеристическое уравнение системы:

D(p) = a0 ·p4 + a1 ·p3 + a2 ·p2 + a3 ·p + a4 = 0.
D(p) = 0.000099454p4 + 0.003685p3 + 0.04215p2 + 0.15027p +1 = 0. (5.1)
Согласно критерию Гурвица, для того, чтобы система была устойчивой, необходимо, чтобы при а0 > 0 были положительны все определители Гурвица: Δ1 > 0, Δ2 > 0, …, Δn > 0, где n – степень характеристического уравнения системы. В нашем случае n = 4, следовательно, должны быть положительны все определители Гурвица:
Δ1 > а1; 
Вычисление всех диагональных миноров выполним с помощью прикладной программы TAU.EXE, а результаты ее работы представлены ниже:
Система устойчива
Миноp 0 - поpядка.000099454
Не нашли, что искали? Воспользуйтесь поиском: