ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Миноp 4 - поpядка 7.5153466183034D-06
Условие нахождения системы на границе устойчивости можно получить, приравняв к нулю последний определитель Гурвица, так как:
Δn = Δn-1 · Кn.
Воспользовавшись тем, что статический коэффициент усиления системы входит в коэффициент а4 характеристического уравнения (5.1) в виде соотношения
аn = 1 + КГР, откуда КГР= аn- 1,
то граничные условия устойчивости для САУ 4-го порядка выглядят следующим образом: 
откуда определим:

Так как КР < КГР , это еще одно доккзательство того, что САУ обладает определенным запасом устойчивости.
5.2 Исследование САУ по критерию Михайлова
Если характеристическое уравнение заданной САУ записать в виде:
a0 · (jω)n + a1· (jω)n-1 +…+ an-1· jω + an= 0,
то его можно заменить эквивалентной суммой вещественной и мнимой частей, обозначив действительную часть через U (ω), а мнимую - через V (ω):
U (ω) +jV(ω) =D(jω),
где U (ω) = Rе D(jω) = an - an-2 · (ω)2 + ….+an-4· (ω) 4+ a0 · (ω)n,
V (ω) = Im D(jω) = an-1 - an-3 · ω + ….+an-5 · ω3+ a1 · ωn-1.
Для характеристического уравнения вида (5.1) аналитические выражения вещественной и мнимой частей имеют вид:
U (ω) = 5.49 – 0.2314 · ω2 + 0.000546 · ω4, (5.2)
0.825 · ω – 0.02023 · ω3. (5.3)
Изменяя ω в пределах от 0 до ∞, получим кривую - годограф Михайлова. Критерий Михайлова формулируется следующим образом: Если годограф D(jω) при изменении ω от 0 до бесконечности повернется против часовой стрелки на угол n ·(π /2), нигде не петляя и не обращаясь в ноль, то система устойчива.
Следуя выше приведенному алгоритму, используя прикладную программу TAU.EXE, получим годограф Михайлова, представленный на рисунке 5.1.
Воспользуемся следствием из критерия Михайлова для нахождения граничного коэффициента усиления, при котором система будет находиться на границе устойчивости. Приравняем вещественную и мнимую части (соответственно выражения (5.2) и (5.3)) к нулю для нахождения значения свободного члена аn :
V (ω) = 0; 0.287 · ω – 0.008854 · ω3 = 0; ω· (0.825 - 0.02023 · ω2) = 0;

 Подставим полученное значение частоты в выражение для U(ω) и найдем из него аn :
Подставим полученное значение частоты в выражение для U(ω) и найдем из него аn :
аn= 0.2314·6.3862 –0.000546 · 6.3864 = 9.4367 - 0.9081= 8.529;
КГР = 8.529 – 1 = 7.529, что совпадает с ранее найденным его значением из критерия Гурвица.
5.3 Исследование устойчивости с помощью критерия D-разбиения
Этот критерий рассматривается для оценки устойчивости замкнутой системы, поэтому используется характеристическое уравнение вида:
a0 · pn+a1 · pn-1 +…+ an-1 · p + an = 0.
Для простоты кривую D-разбиения строят в плоскости одного параметра – коэффициента усиления. Заменим в выражении (5.4) an = 1 + К (для статической системы регулирования) и разрешим характеристическое уравнение относительно К:
0.000546р4 + 0.020236р3 + 0.2314р2 + 0.825р + 1 + К = 0.
Полагая в выражении коэффициент усиления К переменным, заменой оператора Лапласа на оператор Фурье получим сумму вещественной и мнимой частей:
0.000546 · (jω)4 + 0.02023 · (jω)3 + 0.2314· (jω)2 + 0.825· (jω) + 1 + К = 0;
К = – (0.000546 · (jω)4 + 0.02023 · (jω)3 + 0.2314 · (jω)2 + 0.825 · (jω) + 1),
К = –0.000546 · ω4 + j · 0.02023 ·ω 3 + 0.2314 · ω2 –- j · 0.825 · ω – 1.
Задаваясь ω от 0 до +  , строят одну половину годографа, а затем зеркально отображают на графике ее вторую половину (при изменении ω от - до 0). Кривая, построенная с помощью прикладной программы TAU.EXE, изображена на рисунке 5.2. Годограф является отображением мнимой оси плоскости корней на комплексную плоскость параметра К (коэффициента усиления). При нанесении штриховки справа налево при изменении значений ω от –
, строят одну половину годографа, а затем зеркально отображают на графике ее вторую половину (при изменении ω от - до 0). Кривая, построенная с помощью прикладной программы TAU.EXE, изображена на рисунке 5.2. Годограф является отображением мнимой оси плоскости корней на комплексную плоскость параметра К (коэффициента усиления). При нанесении штриховки справа налево при изменении значений ω от –  до + , устойчивость будет сохраняться при значениях корней, лежащих в заштрихованной области. Переход корня из левой полуплоскости в правую через мнимую ось означает потерю устойчивости системы. Из рассмотрения кривой D-разбиения видно, что система остается устойчивой при –1 < К < 1.67, что соответствует ранее найденным значениям КГР.
до + , устойчивость будет сохраняться при значениях корней, лежащих в заштрихованной области. Переход корня из левой полуплоскости в правую через мнимую ось означает потерю устойчивости системы. Из рассмотрения кривой D-разбиения видно, что система остается устойчивой при –1 < К < 1.67, что соответствует ранее найденным значениям КГР.
5.4 Определение статической номинальной и минимальной ошибок
системы
Номинальная ошибка может быть определена по формуле относительной статической погрешности:
Δн = ε / U3 = (U3 – U) /U3 = 1-U/U3 = 1- Kp /(1+Kp);


Рисунок 5.2 – Кривая D-разбиения в плоскости одного параметра
Минимально возможная погрешность определяется по формуле:

6 ПОСТРОЕНИЕ ПЕРЕХОДНОГО ПРОЦЕССА САУ
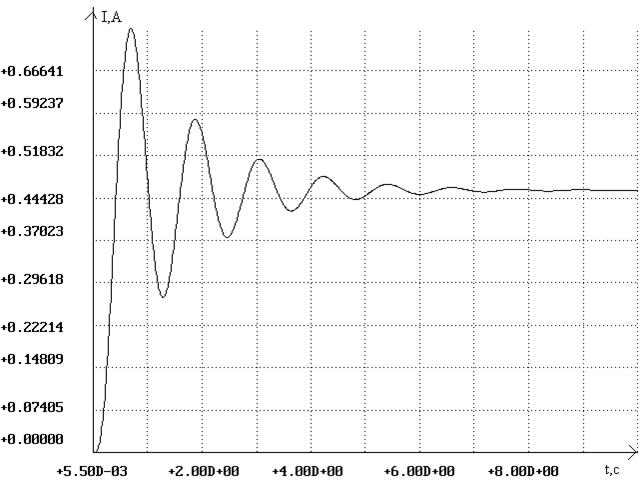
Построение переходного процесса можно выполнить по вещественной частотной характеристике системы в замкнутом состоянии, воспользовавшись методикой В.В.Солодовникова. Но современные технические средства, в частности ЭВМ, позволяют получить переходный процесс САУ гораздо быстрее и точнее. Переходный процесс САУ очистного комбайна, полученный с помощью прикладной программы ТАU.EXE, представлен на рисунке 6.1. По полученному графику определим прямые показатели качества:
 |
Рисунок 6.1 – Кривая переходного процесса исследуемой САУ
-время регулирования tp – время, в течение которого отклонение регулируемой величины от установившегося значения становится меньше наперед заданной величины Δ= ± 5%
-величину перерегулирования - максимальное отклонение σ регулируемой величины от нового установившегося значения в сторону, противоположную от начального значения.
Установившееся значение выходной величины Yуст = 0.4545, тогда величина перерегулирования в статической САУ составит:

что для данного класса систем автоматического управления не приемлемо. Время регулирования определим из графика (рис. 6.1): tp = 5.6 c, что так же не соответствует требованиям качества регулирования.
7 синтез последовательного корректирующего устройства
Корректирующими называются устройства с легко изменяемыми параметрами и характеристиками, вводимые в состав САУ для придания им требуемых динамических свойств –обеспечения устойчивости САУ или улучшения показателей качества переходного процесса. Как было установлено в предыдущем пункте, переходный процесс не соответствует требованиям к качеству процесса регулирования, поэтому для этих целей введем в систему последовательное корректирующее устройство методом логарифмических частотных характеристик.
Для этого следует рассмотреть комплексную функцию системы в разомкнутом состоянии по уравнению (4.1): Kp(p)=Kму(p) ·Kсу(р) ·Кд(р) ·КF(p) · Koc(p).
 (7.1)
(7.1)
Как видно из выражения (7.1), в состав передаточной функции входят два апериодических звена 1-ого порядка и звено 2-ого порядка. Исходя из этого, определим сопрягающие частоты апериодических звеньев, на которых происходит изменение наклона располагаемой ЛАЧХ:

Для нахождения сопрягающей частоты звена 2-ого порядка определим его тип – является ли оно апериодическим звеном 2-ого порядка или колебательным. Для этого найдем коэффициент затухания собственных колебаний звена:

Следовательно, данное звено является колебательным и его передаточная функция имеет вид:
 где Т22= 0.14, Т1 = 0.7.
где Т22= 0.14, Т1 = 0.7.
Вычислим сопрягающую частоту для данного звена:

Низкочастотный участок располагаемой ЛАЧХ статических систем автоматического регулирования имеет наклон 0 дБ/дек на уровне 20lgКР = 20lg4.489 = =13.43 относительно оси частот. Этот участок продолжается до первой (наименьшей) сопрягающей частоты ωс3 .Затем наклон характеристики изменяется на –40 дБ/дек и длится до следующей (по возрастанию) сопрягающей частоты ωс2. Суммарный наклон ЛАЧХ на отрезке (ωс3 ÷ ωс2) составляет –60 дБ/дек и он будет сохраняться до оставшейся сопрягающей частоты ωс1, после которой он изменится еще на –20 дБ/дек и окончательно составит –80 дБ/дек.
Построение желаемой ЛАЧХ производится в трех областях (низко-, средне- и высокочастотной) по заданным показателям качества переходного процесса:
перерегулирование σ = 20 %, время регулирования tР = 1.5 с.
За низкочастотный участок желаемой характеристики можно принять низкочастотную часть характеристики нескорректированной системы. Этот участок определяет точность воспроизведения системой медленно меняющихся воздействий.
Участок средних частот, который определяет запас устойчивости системы и качество ее переходного процесса при ступенчатом воздействии, имеет точку пересечения рассматриваемой характеристики системы с осью абсцисс при частоте ωср, которая определяется по номограмме В.В.Солодовникова [1, стр.187, рис.8.2]:

Для обеспечения достаточного запаса устойчивости системы ее желаемая ЛАЧХ при частоте ωср должна иметь наклон -20 дБ/дек.
Для формирования желаемой ЛАЧХ необходимо воспользоваться номограммой перевода логарифмической АФХ разомкнутой системы в замкнутую («диаграмма замыкания»): 1.07 ≥ Р(ω) ≥ -0.07 и определим величины L1 и L2 [1, стр.188, рис.8.3] L1,2 = ± 27 дБ. Участок желаемой ЛАЧХ под наклоном -20 дБ/дек проводим до модуля ординаты, равной L2 = - 27 дБ, а низкочастотную сторону – до точки пересечения с ординатой располагаемой ЛАЧХ.
Участок высоких частот, слабо влияющий на качество переходного процесса, может не корректироваться. Особое внимание следует обращать на то, чтобы желаемая характеристика имела наклон, как можно меньше отличающийся от наклона нескорректированной системы. Это важно потому, что передаточная функция корректирующего устройства должна быть по возможности простой.
В случае последовательного корректирующего устройства желаемая ЛАЧХ может рассматриваться как сумма двух характеристик: характеристики нескорректированной системы LНК(ω) и характеристики корректирующего устройства LКУ (ω), т.е.:
LЖ(ω) = LНК (ω) + LКУ (ω), откуда: LКУ (ω) = LЖ(ω) - LНК (ω).
Таким образом, для построения ЛАЧХ последовательного корректирующего устройства из желаемой логарифмической амплитудно-частотной характеристики системы нужно вычесть располагаемую характеристику системы (рисунок А.1 Приложения А).
По полученной ЛАЧХ корректирующего звена LКУ (ω) найдем его передаточную функцию, представляющую собой дифференцирующее звено:

Окончательное выражение передаточной функции корректирующего устройства примет вид:
 (7.2)
(7.2)
Техническая реализация корректирующего устройства на элементах пассивного четырехполюсника представлена на рисунке 7.1.
 |
Рисунок 7.1 – Принципиальная электрическая схема корректирующего устройства
Как уже было отмечено выше, корректирующее устройство можно представить в виде стандартного дифференцирующего звена [1, стр.175, табл.7.1]. Задавшись из соображений помехоустойчивости значением С = 20 мкФ, сделаем расчет остальных элементов электрической схемы, изображенной на рисунке 7.1.
С=20 мкФ, тогда ранее рассчитанные постоянные времени будут равны:
Тк1 = R1 · С и к = Тк2 / Тk1 = 0.01 / 0.833 = 0.012.

Определив передаточную функцию корректирующего устройства (см. формулу (7.2)), построим с помощью прикладной программы tau.exe переходный процесс скорректированной САУ. Для этого вначале запишем передаточную функцию замкнутой САУ с введенным последовательным корректирующим устройством. Структурная схема такой системы представлена на рисунке 7.2, а переходный процесс – на рисунке 7.3.
 |
Рисунок 7.2 – Структурная схема скорректированной САУ


Как видно из рисунка 7.3, установившееся значение выходной величины Yуст = 0.4545, тогда величина перерегулирования в скорректированной САУ составит:

что для данного класса систем автоматического управления не приемлемо. Время регулирования определим также из графика (рис. 6.1): tp = 2.75 c, что существенно меньше, чем до введения корректирующего устройства.
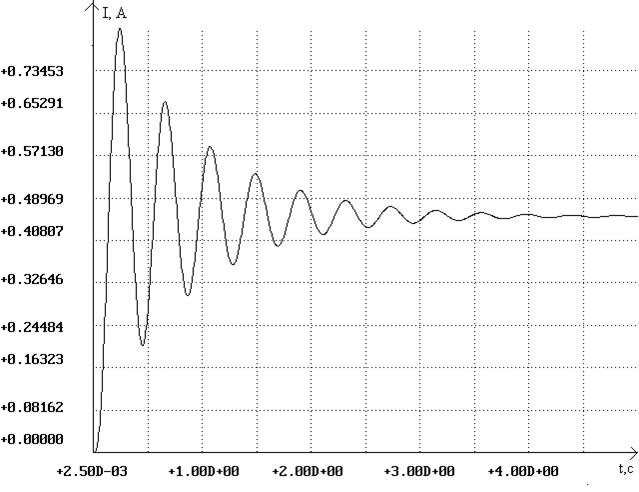

Рисунок 7.3 – Переходный процесс скорректированной САУ
Заключение
В данной курсовой работе мы выполнили исследование САУ угледобывающего комбайна с асинхронным короткозамкнутым двигателем с регулируемой угловой скоростью за счет изменения величины подводимого напряжения и частоты.
В соответствии с принципиальной электрической схемой составили функциональную и структурную схемы САУ. Составили выражения передаточных и комплексно-частотных функций отдельных звеньев и системы в целом для разомкнутого и замкнутого состояний. Нашли граничный коэффициент усиления системы, пользуясь критерием устойчивости Михайлова, Гурвица и проверили систему на устойчивость. Построили переходный процесс при единичном ступенчатом воздействии на входе системы.
Определили показатели качества процесса регулирования: статическое отклонение, перерегулирование, время переходного процесса. По новым показателям качества рассчитали последовательное корректирующее устройство методом логарифмических частотных характеристик. Для типового корректирующего звена произвели расчет элементов пассивной электрической схемы. Определив передаточную функцию замкнутой скорректированной САУ, построили переходный процесс.
Все графические работы выполнены на ЭВМ.
Перечень ссылок
1 Иванов А.А. Теория автоматического управления и регулирования. – М.: Недра, 1970. – 352 с.
2 Ирклиевский В.Д. Автоматическое управление: Учеб. пособ. – К.: Лыбидь, 1992. – 199 с.
3 Егоров К.В. Основы автоматического регулирования. – М.: Энергия, 1987. – 648 с.
4 Попов Е.П. Теория линейных систем автоматического регулирования и управления. – М.: Наука, 1978. – 256 с.
Не нашли, что искали? Воспользуйтесь поиском: