ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Правила техники безопасности при проведении лабораторных 4 страница
Согласно ГОСТ 25686-83 "промышленный робот – это автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого устройства управления и предназначенная для выполнения в производственном процессе двигательных и управляющих функций, заменяющих аналогичные функции человека при перемещении предметов производства и (или) технологической оснастки".
В настоящей лабораторной работе рассматривается промышленный робот ТУР-10, технологический универсальный, предназначенный для автоматизации основных технологических и вспомогательных операций при обслуживании технологического оборудования.
Обычные автоматические участки предназначены для многократного выполнения одной и той же операции. В отличие от них ПР представляет собой универсальные многоцелевые устройства, которые могут взаимодействовать с широкой группой технологического оборудования и быстро перестраивать программы на новый технологический цикл. ПР способны в корне изменить технологические процессы, позволяют совмещать в едином цикле вспомогательные и основные операции. ПР являются основным элементом гибких автоматизированных производств.
Промышленный робот "ТУР-10" – это универсальный робот с позиционной системой управления, электромеханическими приводами, расположенными на основании, работающий в угловой системе координат.
Робот состоит из манипулятора, устройства числового программного управления УПМ-772, блока управления приводами и пневмопанели, соединенных между собой кабелями связи и пневмоприводом.
Манипулятор является исполнительным механизмом робота ТУР-10. Общий вид манипулятора представлен на рис. 1. Основными узлами манипулятора являются: механизм поворота 2, механическая рука 1, приводы электромеханические 4, механизм уравновешивания 3.
Манипулятор имеет 5 степеней подвижности, т.е. может выполнять пять независимых движений. Механическая рука робота перемещается в угловой системе координат. За счет вращения вертикального и горизонтального плеча вокруг двух горизонтальных осей рука может перемещаться в горизонтальной и вертикальной плоскостях.
Кисть механической руки может осуществлять вращения вокруг горизонтальной оси (сгиб кисти) и вокруг своей продольной оси (ротация). Основание робота может вращаться вокруг вертикальной оси.
Геометрические размеры рабочей зоны и диапазоны перемещений звеньев робота ТУР-10 приведены на рис. 2.
ПР ТУР-10 имеет следующие технические характеристики:
| Способ управления | позиционный |
| Способ программирования | обучение |
| Объем памяти, кадров | |
| Номинальная грузоподъемность (включая захватное устройство), кг, не более | |
| Погрешность позиционирования, мм | ± 0,2 |
| Число одновременно управляемых движений по степеням подвижности | |
| Число каналов связи с внешним оборудованием: | |
| выдача команд | |
| прием сигналов условий выполнения программы | |
| прием запросов программы от объектов управления | |
| Электрическое питание – трехфазная сеть переменного тока ' | |
| напряжение, В | |
| частота, Гц | 50± |
| потребляемая мощность, кВт | |
| Давление питания сжатого воздуха, МПа | 0,4 - 0,6 |
| Расход воздуха, | |
| Максимальные скорости перемещения звеньев манипулятора, град/с: | |
| перемещение звена I (поворот вокруг вертикальной оси) | |
| Перемещение звена II(качание вертикального плеча) | |
| перемещение звена III (качание горизонтального плеча) | |
| перемещение звена IV (сгиб кисти) | |
| перемещений звена V (вращение кисти) | |
| Масса, кг не более: | |
| манипулятора | |
| блока управления электроприводами | |
| устройства числового программного управления |
2.2. Механизм поворота механической руки ПР ТУР-10
Механизм поворота предназначен для поворота механической руки вокруг вертикальной оси на 340о. Механизм поворота (рис.3) содержит неподвижное основание 4 и поворотную платформу (стакан 5 и плита 10).
Основание 4 и стакан 5 выполнены литыми из алюминиевого сплава.
На основании установлены мотор-редуктор (электродвигатель 16 типа ПЯ 250 Ф, N = 250 Вт, n = 3000 об/мин и волновой редуктор 2 с передаточным отношением i = 102,5, моментом на выходном валу M = 100 Н×м), датчик положения 12 типа ППК-15. Выходной вал редуктора при помощи компенсирующей муфты 13 и вала II соединен с плитой 10 поворотной платформы.
Вращение на датчик передается от вала редуктора через зубчатую передачу (зубчатые колеса 6 и 7). Передаточное отношение передачи i = 15,6.
Зубчатое колесо 6 выполнено разрезным, между половинками колеса размещена пружина кручения. При установке датчика необходимо верхнюю половину повернуть на 0,25 оборота для выборки бокового зазора в зацеплении.
Датчик 12 устанавливается через окно в стакане 5, закрываемое крышкой. На основании закрепляется неподвижный упор 17, ограничивающий поворот платформы. Для этой цели на стакане выполнен флажок 3.
На основании установлена панель 19 с разъемами для подключения кабелей. На передней стенке стакана закреплена колодка 8, к которой присоедине-
 |
Рис.1. Манипулятор робота ТУР-10
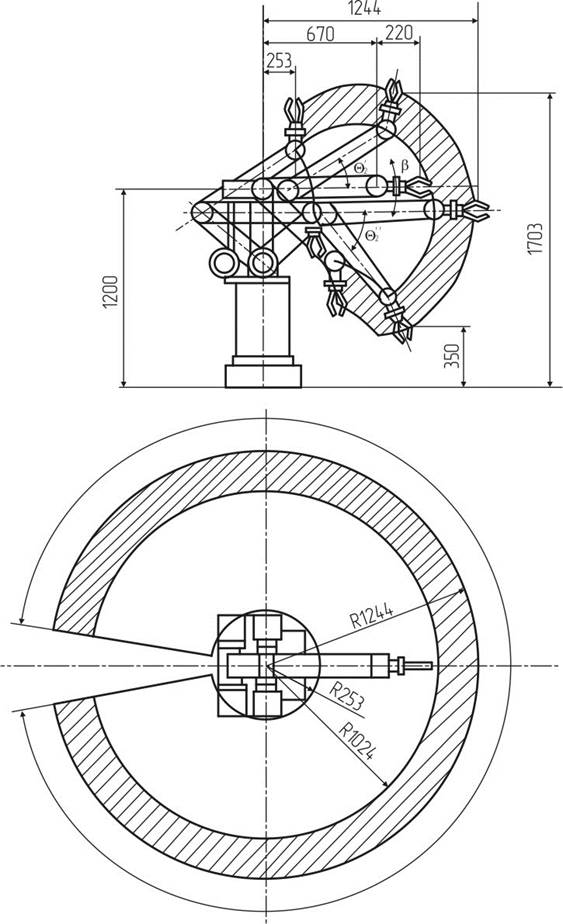
Рис. 2. Геометрические размеры рабочей зоны

Рис. 3. Механизм поворота
ны жгуты связи с датчиками и двигателями приводов звеньев механической руки. Жгуты, соединяющие разъемы панели 19 с колодкой, проложены внутри вращающегося стакана, длина витка позволяет осуществлять поворот платформы на угол 340о. На основании закреплен штуцер 18 для подключения сжатого воздуха давлением 0,4-0,6 МПа от пневопанели.
Па передней стенке стакана поворотной платформы установлены электропневмораспределители 9 (2 шт.), которые предназначены для управления работой пневматических захватных устройств. Пневмораспределители подсоединены к штуцеру 18 поливинилхлоридной трубкой диаметром 4 мм.
На задней стенке стакана установлены пружинные механизмы 14 и 15 уравновешивания звеньев механической руки.
При работе механизма поворота обратная связь по скорости осуществляется посредством тахогенератора типа ТГП3, установленного соосно валу двигателя и соединенного с ним муфтой.
Обратная связь по положению с УКМ-772 осуществляется при помощи датчика ППК-15.
На поворотной платформе устанавливаются механическая рука и индивидуальные электромеханические приводы звеньев руки.
2.3. Кинематическая схема механической руки ПР ТУР-10
Механическая рука манипулятора предназначена для перемещения захватного устройства в вертикальной плоскости по четырем степеням подвижности.
Кинематическая схема руки представлена на рис. 4.
Рука установлена шарнирно на поворотной платформе механизма поворота при помощи корпуса 1. Рука содержит вертикальное звено 8 и шарнирно соединенное горизонтальное звено 11. К горизонтальному звену крепится механизм ориентации захвата (кисть), состоящий из механизма сгиба (звено 17) и механизма вращения (звено 19). Фланец зв6на 20 служит для крепления захватного устройства или инструмента.
Каждое звено руки приводится в движение индивидуальным приводом с помощью передаточных механизмов.
Передача движения к вертикальному звену 8 от привода 12 осуществляется кривошипно-шатунным механизмом, состоящим из кривошипа 6, закрепленного на выходном валу привода, шгтуна13, рычага 18.
Передача движения к горизонтам звену 11 от привода 5осуществляется кривошипно-шатунным механизмом, состоящим из кривошипа 7., закрепленного на выходном валу привода, шатуна 3, Г-образного рычага 2. Г-образный рычаг 2 шарнирно установлен на оси, совпадающей с осью вращения вертикального звена, и закреплен на ней. Одним плечом рычаг 2 соединен с шатуном 3, а другим с тягой 7, шарнирно связанной с горизонтальным звеном 11. Оба кривошипно-шатунных механизма выполнены в виде шарнирных параллелограммов. Передача движения к механизму ориентации (сгиб и вращение) осуществляется с помощью цепных передач. Обе цепные передачи выполнены идентично и содержат по две ветви:
– от выходных валов редукторов 21 и 22 к валам-звездочкам 9 и 10, установленным в шарнире соединения вертикального и горизонтального звеньев;
– от звездочек 9 и 10 к звездочкам 15 и 16, приводящим в движение механизмы кисти.
Натяжение цепей производится талрепами. Вращение кисти производится через коническую передачу 14 с передаточным отношением i = -2.
На выходном валу кисти закреплен фланец 20. Фланец служит для

Рис. 4. Кинематическая схема механической руки
присоединения захватного устройства. Штуцера на фланце служат для подвода воздуха к пневматическим захватам от пневматических клапанов при помощи поливинилхлоридных трубок диаметром 3 мм. Трубки крепятся к наружной части звеньев руки скобами.
2.4. Электромеханические приводы ПР ТУР-10
Все электромеханические приводы звеньев механической руки аналогичны. Приводы предназначены для перемещения звеньев манипулятора.
Каждый привод (рис. 5) содержит электрический двигатель 4 типа ПЯ-250Ф (N = 250 Вт, n = 3000 об/мин, номинальный момент М = 0,8 Н×м), волновой редуктор 10, датчик положения 8 типа ППК-15, тахогенератор 3 типа ТГП-3.
Вращение к валу датчика передается от вала двигателя с помощью ременной зубчатой передачи: передаточное отношение к датчикам приводов движения звеньев (19 и 7) механической руки i = 1:1,6 передаточное отношение к датчикам приводов механизма ориентации захвата i = 1:3,2.
Зубчатая ременная передача содержат шкив 19 (z1 = 26), установленный на входном валу 1 редуктора, шкив 7 (z2 = 45, z’2 = 90), установленный на валу датчика и зубчатый ремень 6 (m = 1).
Тахогенератор устанавливается на крышке двигателя и соединяется с ротором при помощи муфты.
Волновой редуктор (передаточное отношение i = 102,5, номинальный момент М = 10 кг×м) выполнен следующим образом. Ведущий вал-втулка 1 соединяется с валом двигателя при помощи шпонки 2 и другим концом опирается на подшипник 14, установленный в выходном валу 12. На входном валу с радиальным зазором закреплен кулачок 18 генератора волн, соединенный с валом компенсирующей муфтой 16, с помощью которой обеспечивается самоустановка генератора волн в процессе работы, на кулачке установлен гибкий подшипник 17, взаимодействующий с гибким колесом 15 (d = 80 мм, z = 205, m = 0.4), находящимся в зацеплении в двух зонах с жестким колесом 9 (z = 207), закрепленном в корпусе 10.
Ведомым является гибкое колесо 15. Оно соединено с выходным валом 12, который установлен в подшипниках 13 в корпусе 10. Зазор при установке подшипников выбирается с помощью распорных винтов 11. Корпус редуктора имеет фланцы для крепления к двигателю и корпусу шарнира механической руки. На выходном валу редуктора выполнены шлицы для соединения с передаточным механизмом.
2.5. Механизм уравновешивания статических моментов ПР ТУР-10
Механизм уравновешивания предназначен для уравновешивания статических моментов от массы звеньев механической руки. На рис. 6 представлена условно развернутая в плоскость кинематическая схема уравновешивания вертикального и горизонтального (совместно с кистью) звеньев руки (рис. 6).
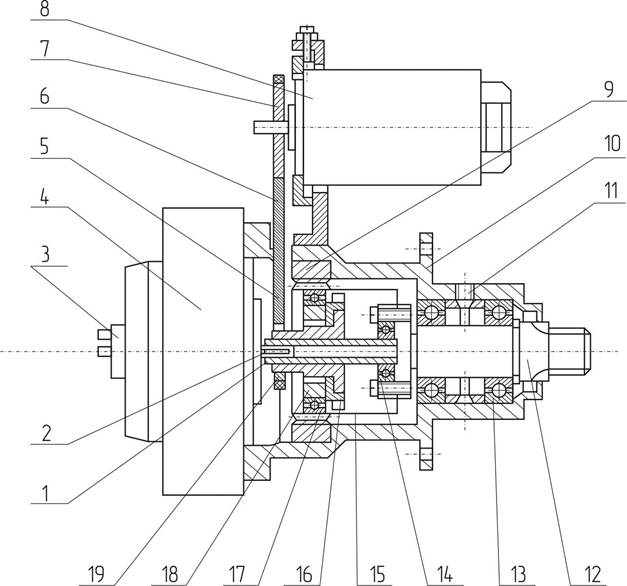
Рис. 5. Привод электромеханический
Уравновешивание горизонтального звена 10 производится с помощью пружины 2, установленной на поворотной платформе. Пружина 2 через передаточный механизм 3цепями 4 и 5 соединена с одним плечом Г-образного кривошипа 6, установленного на валу привода 7качания горизонтального звена. Второе плечо кривошипа 6 соединено с шатуном 8. Уравновешивание статического момента, создаваемого горизонтальным звеном (совместно с механизмом ориентации, захватом и переносимым грузом), обеспечивается практически постоянной силой, создаваемой пружинным механизмом на всем диапазоне перемещения звена. Усилие устанавливается поджатием пружины 2 с помощью гайки 1.
Уравновешивание вертикального звена 9 производится с помощью пружины сжатия 16.

Рис. 6. Схема уравновешивания механической руки
Шток пружины 15 с помощью цепи 14 через преобразователь соединен с пальцем кривошипа 13, установленного на валу привода качания вертикального звена 12. Кривошип 13 шарнирно соединен с шатуном 11.
Пружина 16 устанавливается в корпус с незначительным предварительным поджатием. Рабочее усилие ее выбрано из расчета уравновешивания статического момента, создаваемого звеньями при максимальном отклонении вертикального звена от вертикали. На штоке имеется резьба, позволяющая при помощи гаек 17 менять величину предварительного поджатия.
Уравновешивание должно быть настроено таким образом (установлено давление воздуха и усилие пружины), чтобы в любом положении звеньев манипулятора не наблюдалось самопроизвольное их перемещение.
3. ЗАДАНИЕ НА РАБОТУ
1. Ознакомиться и изучить назначение, технические характеристики, состав, устройство и принцип действия промышленного робота ТУР-10.
2. Ознакомиться и изучить конструкцию и кинематические схемы:
- механизма поворота механической руки;
- механической руки робота;
- электромеханических приводов звеньев;
- механизма уравновешивания статических моментов.
3. Зарисовать конструктивно-компоновочные схемы изучаемых механизмов (по указанию преподавателя).
4. Ответить на контрольные вопросы и оформить отчет.
4. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Прочитать методические указания к лабораторной работе.
2. По методическим указаниям и рисункам изучить конструкции механизма поворота, механической руки, электромеханических приводов и механизма уравновешивания.
3. После изучения перечисленных механизмов провести визуальный осмотр конструкции ПР ТУР-10 и ознакомиться с компоновкой основных агрегатов робота.
4. Ответить на вопросы для самопроверки и дополнительные вопросы преподавателя.
5. ОФОРМЛЕНИЕ ОТЧЕТА
Отчет по лабораторной работе должен содержать:
1. Название, цель и задачи работы.
2. Назначение, состав, принцип действия и технические характеристики ПР ТУР-10.
3. Конструкции, конструктивно-компоновочные схемы изучаемых агрегатов ПР (по указанию преподавателя).
4. Ответы на контрольные вопросы для самопроверки.
6. КОНТРОЛЬНЫЕ ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Какие основные функции выполняют манипулятор, система управления, блок приводов ПР ТУР-10 и как они связаны между собой?
2. По каким основным характеристикам оценивается функционирование ПР ТУР-10?
3. К какому поколению относится робот ТУР-10?
4. Какова кинематическая схема ПР ТУР-10?
5. В какой системе координат работает ПР ТУР-10? Какие виды движений осуществляет механическая рука?
6. По какой компоновочной схеме выполнен манипулятор. В чем е достоинства и недостатки?
7. Каковы конструктивные особенности механизма поворота, механической руки, электромеханических приводов и механизма уравновешивания?
8. Какие передаточные механизмы используются в агрегатах ПР ТУР-10? Почему?
9. В чем достоинства и недостатки используемых в ПР ТУР-10 передаточных механизмов?
7. БИБЛИОГРАФИЧЕСКИЙ СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. Робот промышленный ТУР-10. Паспорт и техническое описание. – Могилев: ПО Техноприбор, 1984. – 62 с.
2. Тусюк С.К. Конспект лекций по курсу «Конструирование устройств РТС». – Тула: ТулПИ, 1985. – 89 с.»
Не нашли, что искали? Воспользуйтесь поиском: