ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
УРАВНЕНИЯ ДВИЖЕНИЯ.
D:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif Простейшим видом механического движения является движение тела вдоль прямой линии с постоянной по модулю и направлению скоростью (равномерное прямолинейное движение). При равномерном движении тело за равные промежутки времени проходит равные пути. Зависимость координаты x от времени t выражается при равномерном прямолинейном движении линейным математическим уравнением: X (t) = x0 + vt, (3.19)
где v = const – скорость движения тела, x 0 – координата точки, в которой тело находилось в момент времени t = 0.

| Рис. 14. Графики равномерного прямолинейного движения. |
На графике закон движения x (t) прямая линия. Чем больше угол α, который образует прямая с осью времени, т.е. чем больше наклон графика, тем больше скорость тела. Скорость тела равна тангенсу угла α наклона прямой x (t), так как стороны BC и AC треугольника ABC имеют разные размерности: сторона BC измеряется в метрах, а сторона AC – в секундах. a = at = an = 0; (3.20).
v = const. (3.21).
s = vt. (3.22).
Путь, пройденный телом, можно тоже определить из графика. Т.к. при равномерном прямолинейном движении, s = vxt, (3.23).
то путь численно равен площади под графиком vx(t):
Равноускоренным прямо линейным движением D:\Program Files\Physicon\Open Physics 2.5 part 1\content\chapter1\section\paragraph2\theory.htmlD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\ring_h.gifD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gifD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif называют движение, при котором вектор ускорения a остается неизменным по модулю и направлению. В случае прямолинейного движения векторы скорости v и ускорения a направлены вдоль прямой движения. Поэтому скорость v и ускорение a можно рассматривать в проекциях на направление движения как алгебраические величины. an = 0; (3.24).
a = at = const. (3.25).
График такой зависимости – отрезок прямой. Его наклон к оси времени говорит о величине ускорения: aх = tg α. (3.26).
Как и в случае с равномерным движением, площадь под графиком vх(t) численно равна пути, пройденным телом.
|
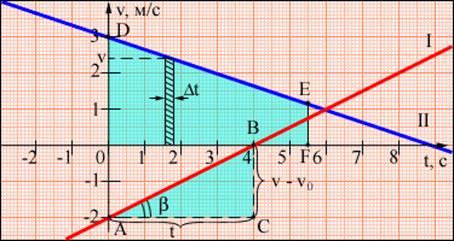
| Рис. 15. Графики скорости равноускоренного движения. |
Перемещение Δs за время Δt будет равно Δs = vΔt. (3.27).
Перемещение за время t при равноускоренном прямолинейном движении равно площади трапеции ODEF. Перемещение s тела при равномерно ускоренном движении на промежутке времени от 0 до t: .s = v0t + (at2)/2. (3.28).
Для нахождения координаты y тела в любой момент времени t к начальной координате y0 прибавляют перемещение за время t:
y = y0 + v0t + (at2)/2. (3.29).
График зависимости координаты тела от времени – парабола.
При анализе равноускоренного движения иногда возникает задача определения перемещения тела по заданным значениям начальной v0 и конечной v скоростей и ускорения a. s = (v2 – v02)/2a. (3.30).
Из этой формулы можно получить выражение для определения конечной скорости v тела, если известны начальная скорость v0, ускорение a и перемещение s: v = √v02 + 2as. (3.31).
Если начальная скорость v0 равна нулю то. s = v2/2a., (3.32).
v = √2as. (3.33).
an = 0; (3.34).
a = at = const. (3.35).
v = v0 + at; (3.36).
s = s0 + v0t + at2/2,. (3.37).
Не нашли, что искали? Воспользуйтесь поиском: