ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Пределы измерений, динамический диапазон
Пределы измерения определяются интервалом (xmin, xmax), внутри которого с помощью данной системы можно измерить нужную величину с требуемой точностью. Динамический диапазон измерительной системы равен отношению хmaх I xmin. Величина хтах обычно определяется предельным значением допустимой нелинейности, которая проявляется при больших входных сигналах. Величина xmin, как правило, определяется ошибками из-за смещения нуля и шумом, который становится тем более значительным, чем меньше сигнал. xmin — это наименьшее значение х, для которого может быть обеспечена заданная точность.
Возьмем, например, случай, когда надо с погрешностью ±3% измерить ток с помощью стрелочного прибора, собственная погрешность которого ±1% от всей шкалы. Динамический диапазон в этом случае равен лишь 3. Другой пример: с помощью измерительного усилителя нужно измерить напряжение с погрешностью 1%. Смещение нуля, отнесенное ко входу усилителя, меньше 10 мкВ. Из-за нелинейности входное напряжение не должно превосходить 10 В, чтобы погрешность не превышала 1%. В этом примере динамический диапазон равен 103.
Отклик системы
Реакция измерительной системы на приложенное ко входу воздействие называется откликом системы. Отклик измерительной системы должен давать верное представление о воздействии; цель собственно измерения, очевидно, состоит не столько в том, чтобы определять характеристики самой измерительной системы. Когда значения измеряемых физических величин меняются со временем (то есть в случае, когда измеряются динамические величины), важно точно знать, как измерительная система будет отслеживать эти изменения: поведение системы в динамике должно обеспечивать верное воспроизведение измеряемой величины.
Динамические свойства линейной измерительной системы целиком определяются ее откликом на единичный скачок на входе (ее переходной характеристикой). Зная переходную характеристику можно найти время установления или время считывания измерительной системы. На рис. 2.36 показаны сигнал x(t) на входе, имеющий вид скачка, и отклик y(t) измерительной системы. Здесь отклик нормирован по отношению к чувствительности по постоянному току 5(0), так что в пределе при t  значения входного и выходного сигналов совпадают. Время установления отсчитывается от момента, когда происходит скачок на входе, до такой точки на оси времени, вслед за которой выходной сигнал y’(t), попав в заданный интервал (уо —
значения входного и выходного сигналов совпадают. Время установления отсчитывается от момента, когда происходит скачок на входе, до такой точки на оси времени, вслед за которой выходной сигнал y’(t), попав в заданный интервал (уо —  уо, уо + у) допустимых отклонений от конечного значения уо, остается в этом интервале. Отношение ± уо / уо представляет собой относительную погрешность измерительной системы. Время установления служит мерой быстродействия измерительной системы.
уо, уо + у) допустимых отклонений от конечного значения уо, остается в этом интервале. Отношение ± уо / уо представляет собой относительную погрешность измерительной системы. Время установления служит мерой быстродействия измерительной системы.
Динамическое поведение линейной измерительной системы также целиком определено, если известно, как она реагирует на синусоидальное колебание меняющейся частоты; то есть в том случае, когда мы знаем частотную характеристику.
Определение частотной характеристики измерительной системы приводит нас к (комплексной) зависимости чувствительности от частоты  . Чувствительность системы состоит из двух характеристик: из амплитудно-частотной характеристики | | и фазо-частотной характеристики Arg . Этими двумя зависимостями динамическое поведение линейной системы определяется полностью. Характеристикой частотных свойств служит ширина полосы
. Чувствительность системы состоит из двух характеристик: из амплитудно-частотной характеристики | | и фазо-частотной характеристики Arg . Этими двумя зависимостями динамическое поведение линейной системы определяется полностью. Характеристикой частотных свойств служит ширина полосы  . Значение представляет собой частоту, на которой мощность выходного сигнала падает вдвое по сравнению с максимальной мощностью на выходе. Следовательно, на частоте амплитуда выходного сигнала уменьшается в
. Значение представляет собой частоту, на которой мощность выходного сигнала падает вдвое по сравнению с максимальной мощностью на выходе. Следовательно, на частоте амплитуда выходного сигнала уменьшается в  раз по сравнению с ее значением на низких частотах. Поэтому значение амплитудно-частотной характеристики на частоте равно S(0) / при условии, что на постоянном токе соответствующая величина равна S(0). Графики, приведенные на рис. 2.37, служат иллюстрацией сказанного. Так как 201ogI0(l/ )
раз по сравнению с ее значением на низких частотах. Поэтому значение амплитудно-частотной характеристики на частоте равно S(0) / при условии, что на постоянном токе соответствующая величина равна S(0). Графики, приведенные на рис. 2.37, служат иллюстрацией сказанного. Так как 201ogI0(l/ )  -3, частоту называют также частотой спада на 3 дБ (сокращенно: точкой «-3 дБ»). Белы и децибелы служат логарифмической мерой отношения мощностей. Эта мера рассмотрена в приложении A3.
-3, частоту называют также частотой спада на 3 дБ (сокращенно: точкой «-3 дБ»). Белы и децибелы служат логарифмической мерой отношения мощностей. Эта мера рассмотрена в приложении A3.
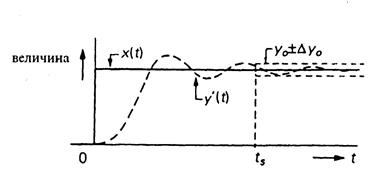
 Рис. 2.36. Отклик y'(t) линейной измерительной системы на входное воздействие x(t) в форме скачка. Переходная характеристика нормализована таким образом, что y'(t) = y(t) / S(0), где S(0) — чувствительность системы по постоянному току. Время установления прибора при допустимой погрешности ±Dyo / уо равно t
Рис. 2.36. Отклик y'(t) линейной измерительной системы на входное воздействие x(t) в форме скачка. Переходная характеристика нормализована таким образом, что y'(t) = y(t) / S(0), где S(0) — чувствительность системы по постоянному току. Время установления прибора при допустимой погрешности ±Dyo / уо равно t  .
.
Рис. 2.37. Частотная характеристика  (f), состоящая из двух зависимостей: амплитудно-частотной характеристики | (f)| и фазо-частотной характеристики Arg (f). Ширина полосы системы равна f 0.
(f), состоящая из двух зависимостей: амплитудно-частотной характеристики | (f)| и фазо-частотной характеристики Arg (f). Ширина полосы системы равна f 0.
Соотношение между входной величиной x (t) и выходной величиной y(f), а значит, и динамическое поведение линейной динамической системы можно представить в виде линейного дифференциального уравнения.
Если у зависит от х, то дифференциальное уравнение, описывающее соотношение между у и х, содержит не только функции от у и от х, но также и производные по времени от этих функций. В линейном дифференциальном уравнении имеются только такие члены, в которые функция у и ее производные входят в первой степени. Порядок дифференциального уравнения равен наивысшему из порядков входящих в него производных.
У многих измерительных систем, различных по своей природе (электрических, тепловых, акустических и т. д.), динамическое поведение оказывается сходным. Если описывать эти системы в обобщенном виде в терминах V- и I -величин, то мы будем получать одни и те же дифференциальные уравнения. Следовательно, при изучении динамических систем можно ограничиться только дифференциальными уравнениями определенного вида. С точки зрения динамического поведения особенно важным является порядок дифференциального уравнения. С учетом этого говорят об (измерительной) системе п-го порядка и об отклике n -го порядка, если поведение системы можно описать с помощью дифференциального уравнения n -го порядка. На практике большинство измерительных систем можно с достаточной точностью описать линейным дифференциальным уравнением второго или более низкого порядка. Поэтому наше рассмотрение будет включать только случаи, когда п принимает одно из трех значений:
0, 1 или 2.
Не нашли, что искали? Воспользуйтесь поиском: