ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Системы второго порядка
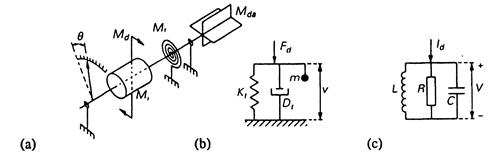
В качестве примера системы второго порядка мы воспользуемся конструкцией стрелочного прибора (в частности, измерителя с подвижной катушкой), которая представляет собой вращающуюся механическую систему. Каждая из следующих четырех механических пар сил оказывает воздействие на вращающуюся часть измерителя, создавая вращающий момент (рис. 2.42(a)):
 - Отклоняющее воздействие. Это воздействие вызывает отклонение стрелки на угол
- Отклоняющее воздействие. Это воздействие вызывает отклонение стрелки на угол  . Момент этого воздействия пропорционален измеряемой величине (току). Мы обозначим этот момент Md.
. Момент этого воздействия пропорционален измеряемой величине (току). Мы обозначим этот момент Md.
Рис. 2.42. Системы второго порядка: (а) механическое вращение; (b) механическое поступательное движение; (с) параллельный электрический контур.
- Возвращающее воздействие. Это воздействие оказывает противодействие отклонению стрелки. В данном примере оно создается спиральной пружиной; вращающий момент этого воздействия обозначается Мr. Когда достигается установившееся состояние, отклоняющий момент и возвращающий момент равны: Md = Мr. Обычно бывает так, что возвращающий момент пропорционален углу отклонения , то есть Мr = Кr , где Кr — коэффициент упругости (жесткость пружины).
- Демпфирующее воздействие. Это воздействие также противодействует отклоняющему моменту. Демпфирующий момент пропорционален угловой скорости стрелки, так что Mda = Dr d / dt. Здесь Dr — постоянная затухания вращающейся конструкции. Затухание линейно зависит от угловой скорости d / dt.
Демпфирование применяют для того, чтобы предотвратить проскакива-ние стрелки за конечное значение и колебания стрелки вокруг него. Для этого используют те или иные крыльчатые приспособления и поршни (воздушное демпфирование), а также индукцию вихревых токов в металлической пластине в случае движущихся систем (демпфирование за счет токов Фуко).
- Инерционность. Инерция вращающейся конструкции измерителя приводит к возникновению еще одного противодействующего момента, который пропорционален угловому ускорению стрелки, так что
 ,
,
где J — момент инерции вращающейся конструкции относительно оси вращения.
Динамическое поведение измерителя определяется его уравнением движения; в любой момент времени отклоняющий момент уравновешивается суммой всех других моментов:
M  + Mda + Мr = Md
+ Mda + Мr = Md
или
 .
.
В результате, как и следовало ожидать, мы пришли к линейному дифференциальному уравнению второго порядка.
Чтобы сделать более ясной аналогию с другими системами, указанными на рис. 2.42, перепишем полученное уравнение, введя новую переменную  :
:
 = Md
= Md
Отклоняющий момент Md является I- величиной (см. приложение А.4), а угловая скорость  — V -величиной. Вращающаяся механическая система аналогична системе с поступательным движением, изображенной на рис. 2.42(b). Эта последняя состоит из груза массы т, пружины с коэффициентом упругости Kt и демпфера с постоянной затухания Dt Если на систему действует сила Fd, то скорость v груза по отношению к земле удовлетворяет равенству
— V -величиной. Вращающаяся механическая система аналогична системе с поступательным движением, изображенной на рис. 2.42(b). Эта последняя состоит из груза массы т, пружины с коэффициентом упругости Kt и демпфера с постоянной затухания Dt Если на систему действует сила Fd, то скорость v груза по отношению к земле удовлетворяет равенству
 .
.
Поскольку v =dx / dt, мы снова приходим к тому же самому линейному дифференциальному уравнению второго порядка, что и полученное ранее. Наконец, обе механические системы — с вращательным и с поступательным движениями — аналогичны электрической системе, показанной на рис. 2.42(c). На этот параллельный электрический контур действует I- величина: по нему течет ток I  . Мы хотим определить V -величину, являющуюся решением уравнения:
. Мы хотим определить V -величину, являющуюся решением уравнения:
 = I .
= I .
Это уравнение эквивалентно обоим уравнениям, полученным выше. Все различие может состоять в том, что I -величины и V -величины поменяются местами. Структура системы остается одной и той же, когда мы переходим от J к m или С, одновременно заменяя Dr на Dt или 1 / R, а также Кr - на Kt или 1 / L (см. приложение А.4). Принимая во внимание, что
V=L  ,
,
последнее уравнение можно переписать в виде:
 ,
,
где I представляет собой ток, текущий по катушке L.
Мы видим теперь, что дифференциальное уравнение, описывающее линейную систему второго порядка, в общем случае содержит две постоянные а и b:
 .
.
Здесь х — это величина входного воздействия х (t), а у — выходная величина y(t), нормализованная по отношению к чувствительности по постоянному току S(0), так что
у = y(f) / S(0). Благодаря нормализации третья постоянная в дифференциальном уравнении отсутствует. Чтобы сделать запись более наглядной, введем две другие постоянные: относительное затухание z и угловую частоту  свободных незатухающих колебаний в системе, и перепишем общее уравнение с использованием этих констант:
свободных незатухающих колебаний в системе, и перепишем общее уравнение с использованием этих констант:
 .
.
В случае системы с вращением переменные и параметры, входящие в это уравнение, имеют вид:
x=  , y= ,
, y= ,  =
=  и
и  ,
,
а в случае системы с поступательным движением —
x=  , y=x, =
, y=x, =  и
и  ,
,
Для электрической цепи имеем:
X=I , y=I, =  и ,
и ,
Соответствующее уравнение в операторной форме выглядит так:
 ,
,
и корни его равны
 .
.
Необходимо различать следующие три характерных случая: z < 1, z = 1 и z>l.
Недостаточное демпфирование (z < 1)
Можно показать, что отклик системы y(t) на входной сигнал, имеющий форму скачка величины х0 , происходящего в момент t = 0, равен
 .
.
где  ; при выводе этого выражения предполагается, что начальные значения у(0) и (dy / dt)t=0 равны нулю. Конечное значение, достигаемое в установившемся режиме, равно
; при выводе этого выражения предполагается, что начальные значения у(0) и (dy / dt)t=0 равны нулю. Конечное значение, достигаемое в установившемся режиме, равно
 .
.
Непосредственно вслед за входным скачком возникают затухающие колебания с частотой  , наложенные на конечное значение (см. рис. 2.43). Мы видим, что с ростом z затухание колебаний происходит все быстрее. Поэтому z называют относительной скоростью затухания. Если z = 0, то колебания в системе продолжаются и их частота равна ; система находится в режиме свободных колебаний. Таким образом, — это резонансная частота системы, в которой затухание отсутствует полностью.
, наложенные на конечное значение (см. рис. 2.43). Мы видим, что с ростом z затухание колебаний происходит все быстрее. Поэтому z называют относительной скоростью затухания. Если z = 0, то колебания в системе продолжаются и их частота равна ; система находится в режиме свободных колебаний. Таким образом, — это резонансная частота системы, в которой затухание отсутствует полностью.
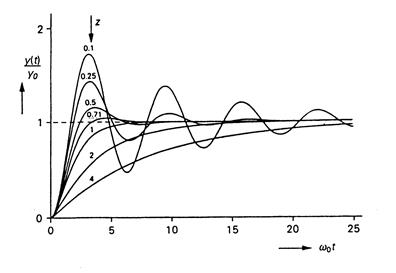
Рис. 2.43. Переходные характеристики системы второго порядка при различных значениях относительного коэффициента затухания z.
Критическое демпфирование (z = 1)
Предполагая снова, что начальные условия являются нулевыми, то есть у(0) = 0 и (dy/dt)  = 0, а величина скачка на входе в момент t = 0 равна х
= 0, а величина скачка на входе в момент t = 0 равна х  , получаем следующее выражение для переходной характеристики системы второго порядка при z = 1:
, получаем следующее выражение для переходной характеристики системы второго порядка при z = 1:
 .
.
Как и ранее, конечное значение у0 равно х0, но теперь на выходе нет затухающих колебаний (см. рис. 2.43).
Обычно измерители с подвижной катушкой бывают сконструированы таким образом, чтобы демпфирование у них было не точно критическим, а слегка недостаточным (z = l/  ). Из-за этого происходит небольшое проскакивание стрелки (4%). Достоинство такого подхода состоит в том, что наблюдатель яснее видит, когда стрелка устанавливается на конечном значении. У такого значения коэффициента затухания z применительно к измерительным системам есть и другое достоинство: при z
). Из-за этого происходит небольшое проскакивание стрелки (4%). Достоинство такого подхода состоит в том, что наблюдатель яснее видит, когда стрелка устанавливается на конечном значении. У такого значения коэффициента затухания z применительно к измерительным системам есть и другое достоинство: при z  0,7 амплитудно-частотная характеристика оказывается горизонтальной в возможно более широком диапазоне частот (этот вопрос рассмотрен ниже; см. рис. 2.45).
0,7 амплитудно-частотная характеристика оказывается горизонтальной в возможно более широком диапазоне частот (этот вопрос рассмотрен ниже; см. рис. 2.45).
Избыточное демпфирование) (z > 1)
При тех же начальных условиях, что и выше, но с коэффициентом затухания z больше единицы, переходная характеристика y(t) как реакция на входной скачок величины х0 в момент t = 0 имеет вид:
 ,
,
где  . В данном случае выходная величина будет постепенно приближаться («ползти») к конечному значению у0 = х0 (см. рис. 2.43).
. В данном случае выходная величина будет постепенно приближаться («ползти») к конечному значению у0 = х0 (см. рис. 2.43).
Постоянная времени прибора или его время установления (готовности) ts зависит от коэффициента затухания z, периода T 0, соответствующего частоте свободных колебаний (T 0 = 2  / ), и, естественно, от допустимой относительной ошибки в конечной величине
/ ), и, естественно, от допустимой относительной ошибки в конечной величине  y / y (см. рис. 2.44). У кривых на этом графике имеются разрывы при z < 1, обусловленные тем, что при заданных значениях Т0 и относительной погрешности (скажем 0,1%) время готовности ts увеличивается скачками при непрерывном уменьшении коэффициента затухания z. Причина скачков заключается в том, что время готовности каждый раз увеличивается на один период затухающих колебаний.
y / y (см. рис. 2.44). У кривых на этом графике имеются разрывы при z < 1, обусловленные тем, что при заданных значениях Т0 и относительной погрешности (скажем 0,1%) время готовности ts увеличивается скачками при непрерывном уменьшении коэффициента затухания z. Причина скачков заключается в том, что время готовности каждый раз увеличивается на один период затухающих колебаний.
Частотную характеристику системы второго порядка легко найти, рассматривая RLC -аналог такой системы, показанный на рис. 2.42(c):
 =
=  .
.
Амплитудно-частотная характеристика имеет вид:
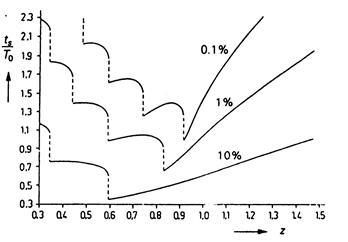
Рис.2.44. Время установления (готовности) ts системы второго порядка при различных значениях допустимой относительной ошибки у0 / у0 в конечном результате yQ.. TQ — период свободных колебаний,,a z — относительный коэффициент затухания системы.
| |=  ,
,
а для фазовой характеристики справедливо соотношение:
Arg = -arctg  .
.
Подставляя z2 = L/4R2C и =1 / LC, можно написать эти выражения в общей форме. Дифференцируя | | по , находим, что максимум | | достигается при
тгх =  и значение | | в максимуме равно
и значение | | в максимуме равно
|  |=
|= 
(при z  ).
).
Частотная характеристика оказывается плоской в возможно более широ-ком диапазоне частот, если | | = |  |=1, то есть в случае, когда z = /2. При этом ширина полосы системы равна f0 = / 2 -, где t — частота свободных колебаний. В точке = фазовый сдвиг равен —90°. На очень высоких частотах сдвиг по фазе стремится к —180°, но никогда не превышает этого значения, а величина сигнала на выходе системы при этом почти равна нулю. Если z = /2, то амплитудно-частотная характеристика имеет пик на частоте затухающих колебаний (см. рис.2.45 (а) и (b)).
|=1, то есть в случае, когда z = /2. При этом ширина полосы системы равна f0 = / 2 -, где t — частота свободных колебаний. В точке = фазовый сдвиг равен —90°. На очень высоких частотах сдвиг по фазе стремится к —180°, но никогда не превышает этого значения, а величина сигнала на выходе системы при этом почти равна нулю. Если z = /2, то амплитудно-частотная характеристика имеет пик на частоте затухающих колебаний (см. рис.2.45 (а) и (b)).

Рис. 2.45. (а) Амплитудно-частотная и (b) фазо-частотная характеристики системы второго порядка при различных значениях коэффициента затухания z.
Нелинейные системы
До сих пор мы рассматривали отклик систем, предполагая, что они являются линейными. Но что произойдет, если эти системы нелинейны? На рис. 2.32 уже было показано, что по мере того, как входные величины становятся достаточно большими, всякая реальная система, в конце концов, становится нелинейной из-за насыщения, перегрузки или ограничения. Сейчас на простом механическом примере мы проиллюстрируем, что происходит при этом с откликом.
Рассмотрим классический метод определения механической силы с помощью пружинного измерителя, в котором сила Fd, приложенная к внутренней пружине, преобразуется в пропорциональное изменение / длины пружины. Пусть штифт или кольцо, с помощью которых усилие передается пружине, обладают определенной массой, а о пружине предполагается, что у нее есть некоторое затухание. Тогда при малом входном воздействии, когда сила мала, и малом соответствующем изменении длины, можно воспользоваться аналогом, изображенным на рис. 2.42(b). Когда / мало, статическое поведение пружинного измерителя силы определяется законом Гука: Fd = К  l, где Kt — жесткость пружины (ее коэффициент упругости). Динамическое поведение этой линейной системы уже рассмотрено: при малых нагрузках пружинный измеритель силы является линейной системой второго порядка «пружина с грузом» с демпфированием.
l, где Kt — жесткость пружины (ее коэффициент упругости). Динамическое поведение этой линейной системы уже рассмотрено: при малых нагрузках пружинный измеритель силы является линейной системой второго порядка «пружина с грузом» с демпфированием.
Однако в случае, когда прикладываемая сила велика, сказанное перестает быть справедливым: система становится нелинейной. Нелинейность возникает из-за того, что с увеличением растяжения или сжатия внутренняя пружина измерителя постепенно становится более жесткой или мягкой. Жесткость пружины больше не является постоянной. На рис. 2.46(a) показаны зависимости, иллюстрирующие статическое поведение такой нелинейной пружины.
Чтобы описать поведение пружинного измерителя силы более реалистично с учетом нелинейности, сделаем в линейном дифференциальном уравнении второго порядка, относящемся к механической системе с поступательным движением, подстановку: v = dl / dt. В результате получим:
и l =l(t).
Нелинейность возникает из-за четвертого слагаемого в левой части первого из приведенных равенств. Предполагается, что нелинейность пружины симметрична (одинакова для растяжения и сжатия). Наличие нелинейности обусловлено тем, что степень l отлична от 1. Если  > 0, то пружина становится все более жесткой, по мере того, как она растягивается или сжимается. Если = 0, то пружина линейна, а если
> 0, то пружина становится все более жесткой, по мере того, как она растягивается или сжимается. Если = 0, то пружина линейна, а если
< 0, то она становится все менее упругой с ростом l. При очень малых значениях l система ведет себя как линейная система второго порядка, так как в этом случае
l  < К l и поэтому членом l , ответственным за нелинейность, можно пренебречь.
< К l и поэтому членом l , ответственным за нелинейность, можно пренебречь.
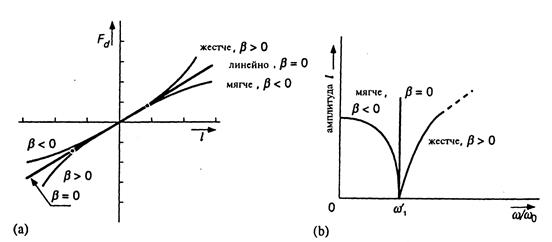
Рис.2.46. Нелинейная система «пружина с грузом», (а) Пружина, становящаяся более жесткой,
> 0; линейная пружина, = 0; пружина, становящаяся более мягкой < 0; F — сила, необходимая для растяжения / сжатия пружины на величину l. (b) Связь между амплитудой l основной гармоники свободных колебаний нелинейной системы и нормированной резонансной частотой / .
Чтобы составить верное представление о динамическом поведении, рассмотрим сначала свободные колебания системы: Fd(t) = 0 при t  0. Кроме того, предположим, что демпфирование отсутствует: Dt = 0. Однажды подвергнутая воздействию, система будет продолжать колебаться, порождая периодический сигнал l = l(t) = l(t±nT), п — целое. Теперь период Т = 1/ f = 2 / зависит от амплитуды колебаний! Это показано на рис. 2.46(b). При малых отклонениях частота со оказывается равной угловой частоте линейной системы второго порядка. По мере того, как амплитуда отклонений растет, период укорачивается или удлиняется в зависимости от того, становится пружина более жесткой или менее жесткой ( > 0 или < 0). Следует заметить, что теперь колебание l=l(t) уже не является чисто синусоидальным, а помимо основной гармоники содержит гармоники высших порядков. Форма колебания также меняется с ростом амплитуды отклонений. Колебание является синусоидальным только при очень малых отклонениях.
0. Кроме того, предположим, что демпфирование отсутствует: Dt = 0. Однажды подвергнутая воздействию, система будет продолжать колебаться, порождая периодический сигнал l = l(t) = l(t±nT), п — целое. Теперь период Т = 1/ f = 2 / зависит от амплитуды колебаний! Это показано на рис. 2.46(b). При малых отклонениях частота со оказывается равной угловой частоте линейной системы второго порядка. По мере того, как амплитуда отклонений растет, период укорачивается или удлиняется в зависимости от того, становится пружина более жесткой или менее жесткой ( > 0 или < 0). Следует заметить, что теперь колебание l=l(t) уже не является чисто синусоидальным, а помимо основной гармоники содержит гармоники высших порядков. Форма колебания также меняется с ростом амплитуды отклонений. Колебание является синусоидальным только при очень малых отклонениях.
Из нашего рассмотрения следует, что в случае нелинейных систем нельзя говорить о частотной характеристике, так как поведение системы теперь зависит от амплитуды! Принцип суперпозиции более не действует, и, как мы увидим дальше, динамическое поведение таких систем может быть самым удивительным.
Предположим теперь, что затухание уже не равно нулю (Dt  0) и на систему действует синусоидальная внешняя возбуждающая сила Fd = Fd (t) с постоянной амплитудой
0) и на систему действует синусоидальная внешняя возбуждающая сила Fd = Fd (t) с постоянной амплитудой  . На рис. 2.47 показано, что случится с такой системой, если пружина постепенно становится более жесткой ( > 0). На этом графике приведена зависимость амплитуды l=l(t) основной гармоники от частоты возбуждения .
. На рис. 2.47 показано, что случится с такой системой, если пружина постепенно становится более жесткой ( > 0). На этом графике приведена зависимость амплитуды l=l(t) основной гармоники от частоты возбуждения .
Чтобы построить эту зависимость, необходимо отфильтровать частоту основной гармоники, совпадающую с частотой прилагаемого извне силового воздействия, из (искаженного) сигнала l(t). Здесь мы приводим только амплитуду этой основной гармоники (линеаризированное поведение). Как видим, резонансная кривая больше не имеет того привычного вида, который характерен для линейной системы второго
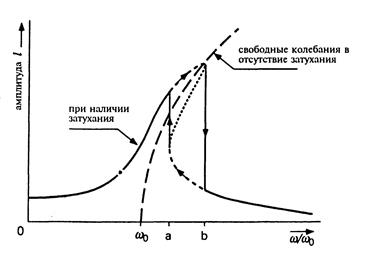
Рис. 2.47. Зависимость амплитуды основной гармоники вынужденных колебаний нелинейной системы «пружина с грузом» от частоты синусоидального воздействия постоянной амплитуды при наличии демпфирования (в случае, когда жесткость пружины увеличивается).
порядка и показан на рис. 2.45(a). Она теперь наклонена в сторону более высоких частот; другими словами, она теперь перекошена. Если амплитуда синусоидального воздействия меняется, то пик резонансной кривой будет перемещаться по штриховой линии, которая является характеристикой свободных колебаний (как на рис. 2.46(b), > 0).
Если частота возбуждающей силы увеличивается, но амплитуда остается постоянной, то выходная величина в системе «пружина с грузом» внезапно падает до много меньшего уровня (явление перескока) после того, как на частоте со = Ьсо0 достигается пик резонансной кривой. Когда частота уменьшается (опять же при неизменной амплитуде входного воздействия), амплитуда основной гармоники в сигнале /(/) вдруг скачком переходит к большему значению на частоте =a . Следовательно, в интервале частот b  b система неустойчива. Установившийся режим никогда не может принадлежать кривой, изображенной точками внутри этого интервала. Мы видим, что резонансные кривые такого рода нелинейных механических систем обладают гистерезисом.
b система неустойчива. Установившийся режим никогда не может принадлежать кривой, изображенной точками внутри этого интервала. Мы видим, что резонансные кривые такого рода нелинейных механических систем обладают гистерезисом.
Если мы теперь вдобавок станем изменять амплитуду возбуждающей силы Fd(t), то получим резонансные кривые, представленные на рис. 2.48. На рис. 2.48(a) показаны характеристики системы «пружина с грузом» в случае, когда жесткость пружины постепенно увеличивается, а на рис. 2.48(b) — для случая, когда жесткость пружины уменьшается.
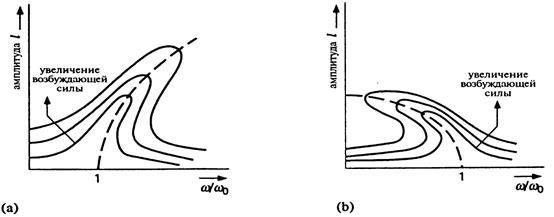 Рис. 2.48. Влияние амплитуды входного воздействия на резонансные кривые (см. рис. 2.47) нелинейной системы «пружина с грузом» при наличии демпфирования. На рис. (а) представлен случай, когда жесткость пружины увеличивается (b > 0), а на рис. (b) показаны амплитудно-частотные характеристики для случая, когда пружина постепенно становится мягче (b < 0).
Рис. 2.48. Влияние амплитуды входного воздействия на резонансные кривые (см. рис. 2.47) нелинейной системы «пружина с грузом» при наличии демпфирования. На рис. (а) представлен случай, когда жесткость пружины увеличивается (b > 0), а на рис. (b) показаны амплитудно-частотные характеристики для случая, когда пружина постепенно становится мягче (b < 0).
Наконец, обратим внимание на тот факт, что у систем такого рода при возбуждении их синусоидальным воздействием, помимо высших гармоник на частотах к , могут наблюдаться субгармоники на частотах / п (здесь к и п — целые числа). Обычно это происходит при малом, но не равном нулю затухании Dr.
Приведенный иллюстративный пример поведения нелинейной динамической системы ясно показывает, насколько сложными могут быть эти системы. Это обстоятельство является одной из причин, по которым в измерительных системах стараются избежать сколько-нибудь существенной (динамической) нелинейности: система становится слишком сложной.
Не нашли, что искали? Воспользуйтесь поиском: