ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Регулирование частоты вращения двигателей с параллельным, независимым и смешанным возбуждением
Регулирование частоты вращения двигателей постоянного тока
Основным преимуществом двигателей постоянного тока является сравнительная простота регулирования частоты вращения якоря в больших пределах. Основными способами регулирования частоты вращения якоря двигателей являются:
- якорное регулирование,
- полюсное регулирование,
- реостатное регулирование.
Сущность каждого способа регулирования частоты вращения можно понять, анализируя уравнение, определяющее связь между частотой вращения, напряжением питания, сопротивлением регулировочного реостата и током возбуждения. Ток возбуждения определяет магнитный поток машины.
Уравнение электрического равновесия двигателя, последовательно с якорем которого включен регулировочный реостат сопротивлением R р:
 или
или  .
.
Отсюда
 .
.
Регулировочное сопротивление включается последовательно с якорем, подобно пусковому реостату. Оно работает в длительном режиме, поэтому его номинальная мощность определяется максимальной рассеиваемой мощностью при самых неблагоприятных условиях.
Из формулы следует, что частота вращения пропорциональна приложенному напряжению и обратно пропорциональна магнитному потоку  .
.
Рассмотрим каждый способ управления двигателем.
Якорное управление
Под якорным управлением понимают регулирование скорости вращения якоря двигателей постоянного тока путем изменения напряжения на зажимах якоря двигателя. Напряжение на зажимах обмотки возбуждения должно оставаться неизменным. При таком способе управления двигателем регулировочное сопротивление не используют, и сопротивление цепи якоря определяется только сопротивлением обмотки якоря R я. Тогда
 .
.
При неизменной величине магнитного потока и сопротивления цепи якоря  , но при различных значениях напряжения питания двигатель будет иметь различные искусственные механические характеристики, проходящие через точку частоты вращения идеального холостого хода, величина которой определяется из уравнения
, но при различных значениях напряжения питания двигатель будет иметь различные искусственные механические характеристики, проходящие через точку частоты вращения идеального холостого хода, величина которой определяется из уравнения  и находится на оси частот вращения n. Другая точка механической характеристики определяется величиной пускового момента
и находится на оси частот вращения n. Другая точка механической характеристики определяется величиной пускового момента
 .
.
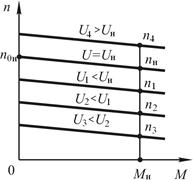 Рис. 3.21 Рис. 3.21
|
Очевидно то, что и  и
и  пропорциональны напряжению питания якоря U
пропорциональны напряжению питания якоря U
и механические характеристики при различных напряжениях сети U параллельны друг другу. Семейство таких характеристик представлено на рис. 3.21.
Если двигатель нагружен номинальным моментом М н, то каждому напряжению соответствует своя частота вращения, пропорциональная приложенному напряжению U. Номинальному напряжению U н соответствует номинальная частота вращения n н. Напряжение меньше номинального  обеспечивает меньшую частоту вращения
обеспечивает меньшую частоту вращения  . Аналогично изменяется частота вращения при увеличении напряжения
. Аналогично изменяется частота вращения при увеличении напряжения  и
и  . Падение напряжения на сопротивлении якоря при неизменном моменте остается постоянным. Увеличение напряжений до значений, больших номинального, нежелательно, так как частота вращения при этом становится больше номинальной величины, а это может привести к преждевременному износу машины. На практике иногда допускается увеличение напряжения на якоре на 15–20 % выше номинального напряжения.
. Падение напряжения на сопротивлении якоря при неизменном моменте остается постоянным. Увеличение напряжений до значений, больших номинального, нежелательно, так как частота вращения при этом становится больше номинальной величины, а это может привести к преждевременному износу машины. На практике иногда допускается увеличение напряжения на якоре на 15–20 % выше номинального напряжения.
Полюсное управление
Под полюсным управлением двигателя постоянного тока понимают регулирование частоты вращения якоря путем изменения напряжения на зажимах обмотки возбуждения. При полюсном управлении двигателем при постоянном моменте на валу ток якоря и напряжение на якоре остаются неизменными. Регулируют лишь ток возбуждения, изменение которого приводит к изменению магнитного потока. Из уравнения скорости
очевидно то, что числитель дроби остается величиной постоянной и частота вращения обратно пропорциональна магнитному потоку.
 Рис. 3.22 Рис. 3.22
|
Рассмотрим семейство механических характеристик двигателя, соответствующих различным значениям тока возбуждения, предполагая, что магнитная цепь машины не насыщена и магнитный поток прямо пропорционален току возбуждения. Как и прежде, построение механических характеристик будем вести, определяя частоту вращения идеального холостого хода n 0 и величину пускового момента M п. На рис. 3.22 изображено семейство полных механических характеристик, соответствующих различным значениям тока возбуждения.
Естественная механическая характеристика представляет собой прямую линию, проходящую через точки
 и
и  .
.
При уменьшении тока возбуждения на 20 % частота вращения идеального холостого хода увеличивается. Пусковой момент  при этом уменьшается на 20 % (см. рис. 3.22). При увеличении тока возбуждения на 20 % происходит уменьшение частоты вращения идеального холостого хода
при этом уменьшается на 20 % (см. рис. 3.22). При увеличении тока возбуждения на 20 % происходит уменьшение частоты вращения идеального холостого хода  . Пусковой момент при этом увеличится в такое же число раз.
. Пусковой момент при этом увеличится в такое же число раз.
Механические характеристики двигателя постоянного тока
с изменением механических моментов нагрузки в пределах от  до
до  представлены на рис. 3.23.
представлены на рис. 3.23.

Рис. 3.23
При изменении тока возбуждения угол наклона механических характеристик изменяется. При этом уменьшение тока возбуждения приводит к увеличению частоты вращения, а увеличение тока возбуждения дает уменьшение частоты вращения двигателя. Диаметр провода обмотки возбуждения выбирается из условия прохождения номинального тока, поэтому значительное увеличение тока возбуждения до значений выше номинального приводит к перегреву обмотки возбуждения. Иногда допускают превышение тока возбуждения на 15-20 %.
Из уравнения механической характеристики следует то, что частота вращения идеального холостого хода обратно пропорциональна магнитному потоку . Если предположить, что магнитный поток машины пропорционален току возбуждения, то  ,
,
где k – коэффициент пропорциональности, тогда  .
.
Теоретически уменьшение тока возбуждения в два раза дает двукратное увеличение частоты вращения, что уже недопустимо.
Дальнейшее уменьшение тока возбуждения приводит к аварийной ситуации и к выходу двигателя из строя. Поэтому системы защиты двигателя контролируют величину тока возбуждения и отключают напряжение питания якоря при опасно малых токах возбуждения. Таким образом, возможности полюсного управления двигателей постоянного тока весьма ограничены.
Реостатное регулирование
 Рис. 3.24 Рис. 3.24
|
Под реостатным управлением двигателя постоянного тока понимают изменение скорости вращения двигателя путем изменения сопротивления цепи якоря. Для такого регулирования последовательно с якорем включают реостат  (рис. 3. 2 4). Изменение частоты вращения двигателя постоянного тока с помощью регулировочного реостата возможно в том случае, когда двигатель нагружен механическим моментом, близким к номинальной величине. Принцип регулирования основан на том, что при изменении сопротивления цепи якоря изменяется угол наклона механической характеристики двигателя к оси моментов и при постоянном механическом моменте сопротивления на валу частота вращения изменяется. Схема включения двигателя изображена на рис. 3.24.
(рис. 3. 2 4). Изменение частоты вращения двигателя постоянного тока с помощью регулировочного реостата возможно в том случае, когда двигатель нагружен механическим моментом, близким к номинальной величине. Принцип регулирования основан на том, что при изменении сопротивления цепи якоря изменяется угол наклона механической характеристики двигателя к оси моментов и при постоянном механическом моменте сопротивления на валу частота вращения изменяется. Схема включения двигателя изображена на рис. 3.24.
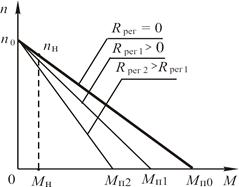 Рис. 3.25 Рис. 3.25
|
Рассмотрим полные механические характеристики при различных сопротивлениях регулировочного реостата. Семейство полных механических характеристик двигателя при различных величинах сопротивлений регулировочного реостата R рег показано на рис. 3.25. Ранее получена формула, описывающая механическую характеристику двигателя при включенном последовательно с якорем регулировочном реостате
 .
.
Положение механической характеристики определяется двумя точками: скоростью идеального холостого хода  и пусковым моментом
и пусковым моментом  .
.
 Рис. 3.26 Рис. 3.26
|
Из приведенных формул следует, что скорость идеального холостого хода не зависит от сопротивления регулировочного реостата. Величина же пускового момента обратно пропорциональна этому сопротивлению. Поэтому угол наклона характеристик при увеличении сопротивления регулировочного реостата увеличивается  . Механические характеристики двигателя для значений моментов от 0 до 1,5 М н и при различных величинах сопротивлений регулировочного реостата R рег показаны на рис. 3.26.
. Механические характеристики двигателя для значений моментов от 0 до 1,5 М н и при различных величинах сопротивлений регулировочного реостата R рег показаны на рис. 3.26.
При неизменном механическом моменте ток якоря является величиной постоянной, и вторая слагаемая уравнения скорости  , имея отрицательный знак, увеличивается
, имея отрицательный знак, увеличивается
при увеличении R рег. Таким образом, увеличение R рег приводит к уменьшению частоты вращения двигателя. На рис. 3.26  .
.
При таком способе регулирования частоты вращения при постоянном моменте на валу мощность, потребляемая из сети, остается неизменной  . Выходная же мощность двигателя при уменьшении частоты вращения уменьшается, так как
. Выходная же мощность двигателя при уменьшении частоты вращения уменьшается, так как  . Мощность потерь
. Мощность потерь  , равная разности мощности, потребляемой из сети, и выходной мощности, с уменьшением частоты вращения увеличивается за счет увеличения мощности нагревания регулировочного реостата, так как потери в самом двигателе изменяются незначительно. КПД всей установки при таком способе регулирования частоты вращения гораздо меньше номинального значения. С точки зрения энергетических затрат такой способ регулирования частоты вращения неэффективен.
, равная разности мощности, потребляемой из сети, и выходной мощности, с уменьшением частоты вращения увеличивается за счет увеличения мощности нагревания регулировочного реостата, так как потери в самом двигателе изменяются незначительно. КПД всей установки при таком способе регулирования частоты вращения гораздо меньше номинального значения. С точки зрения энергетических затрат такой способ регулирования частоты вращения неэффективен.
Не нашли, что искали? Воспользуйтесь поиском: