ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Механизм передвижения крана.
Кабина;
Подкрановые пути;
Ходовые колеса;
Концевые балки;
Гибкий кабель;
Вспомогательный механизм подъема;
Главный механизм подъема;
Крановая тележка;
Проволока;
Площадка для обслуживания;
Мост;
Механизм передвижения тележки;
Механизм передвижения крана.
1.2 Кинематическая схема мостового крана.
Подача движения с вала двигателя к рабочему механизму осуществляется по кинематическим цепям через редуктор, назначение которого уменьшить скорость рабочего механизма и тяговое усилие на валу двигателя – момент нагрузки.
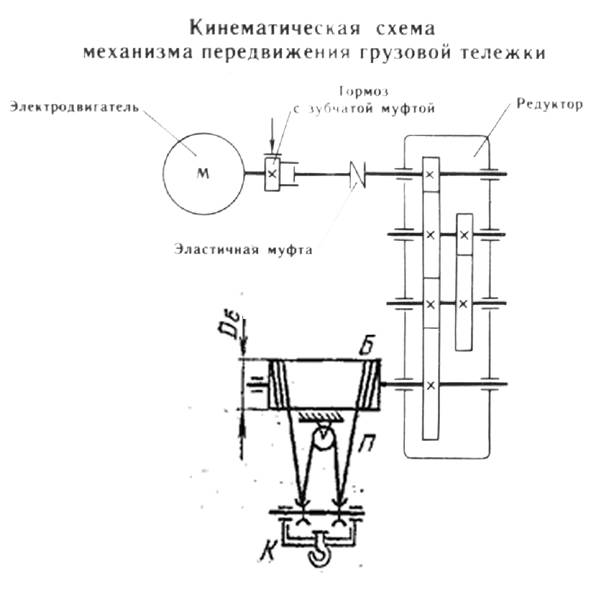
Рисунок 1.2.1 – Кинематическая схема механизма подъема
В данной кинематической схеме движение с двигателя передается через промежуточный вал и механический тормоз (Т) на редуктор (Р), из данной схемы видно, что редуктор трехступенчатый, двухрядный.
После чего движение подается через барабан (Б) на полиспаст (П), передаточное число которого равно 2. От полиспаста движение передается грузовой подвеске с крюком (К).
Таким образом, длина пролета моста Lm составляет 21 метров, для привода применяем один двигатель.
2 ТРЕБОВАНИЯ К ЭЛЕКТРООБОРУДОВАНИЮ КРАНА
2.1 Назначение электроснабжения крана
Электрооборудование крана выполняется и эксплуатируется в соответствии с «Правилами устройств и безопасной эксплуатации электрооборудования кранов».
Краны относятся к категории потребителей не ниже второй, краны взрывопожароопасных помещений к первой категории.
Электроснабжение осуществляется от напряжения не более 500В, 440В для электроприводов постоянного тока, 380В для электроприводов переменного тока. Электроснабжение выполняется от главных (цеховых) троллей, через токосъемники получает питание, вспомогательных троллей крана или гибкий шланговый кабель подающий питание на защитную панель, размещенную в кабине крановщика. От защитной панели через вводный рубильник гибким шланговым кабелем запитываются двигатели подъема и тележки и двигатели расположены на мосту. Защитная панель отпирается индивидуальным ключ-биркой, который не может быть выдернут без операции отключения.
Все металлоконструкции крана соединяются с главным контуром заземления цеха через подкрановые пути. Режим работы нейтрале TN-C.
2.2 Основные виды защиты электрооборудования крана
На кранах обязательны к применению следующие виды защит:
· Максимально токовая защита от токов к.з. и сверх перегрузов с выше 225% выполняет реле максимального тока или автоматическими выключателями без теплового расцепителя (тепловая защита на кранах не применяется);
· Нулевая защита – это защита от само запуска двигателя при отключении напряжения и его восстановление осуществляется через линейный контактор и реле напряжения цепь питания которых восстанавливается только при переводе всех контроллеров крана в нулевое напряжения;
· Все механизмы крана снабжаются конечными выключателями отключающие электропривода в крайних положениях;
· Люк выхода на мост и двери кабины снабжены конечными выключателями отключающие вводной линейный контактор при открытии люка или кабины;
· Все двигатели крана фиксируются нормально закрытыми тормозами, краны взрывопожароопасных цехов двумя тормозами.
2.3 Требования к электроприводу крана
Электропривод кранов должен удовлетворять следующим требованиям:
1. Диапазон регулирование скорости D 4:1, 10:1 для специальных
кранов;
2. Наличие реверса;
3. Высока жесткость механических характеристик;
4. Ограничение ускорения для предотвращения раскачивания груза, проскальзывания ходовых колес при обеспечении высокой производительности крана.
Данным требованиям удовлетворяют следующие системы электропривода:
1. На однобалочных кранах применяют АД с короткозамкнутым ротором, серии MTKH, MTKF (MT – крановая металлургическая серия,
K – короткозамкнутый ротор, F,H – класс изоляции);
2. На кранах большой грузоподъемности мостовых, двух балочных, козловых применяются АД с фазным ротором MTF, MTH, с реостатным регулированием скорости, кулачковыми или магнитными контроллерами;
3. При необходимости плавного регулирования скорости в большом диапазоне применяется частотно регулируемый частотный короткозамкнутый двигатель серии АМТК.
В системе электропривода двигатели крана работают в двигательном режиме и в режиме торможения противовключения.

Рис. 2.1 Режимы работы двигателей в системе электропривода крана.
2.4 Режимы работы электрооборудования крана, расчет ПВ.
Электрооборудование кранов выпускается и эксплуатируется для повторного кратковременного режима работы S3. В зависимости от загрузки крана различают 4 разновидности данного режима:
· Л – легкий, ПВ = 10-15%. В данном режиме работают строительно-монтажные краны, ремонтных вспомогательных цехов, в котельных насосных станций;
· С – средний, ПВ = 15-25%. В данном режиме работают краны машиностроительных цехов, среднесерийного производства;
· Т – тяжелый, ПВ = 25-40%. В данном режиме работают краны машиностроительных цехов крупносерийного и массового производства;
· ВТ – весьма тяжелый, ПВ = 40-60%. В данном режиме работают краны металлургического производства.
Для мостового крана токарного цеха режим работы средний, ПВ = 25%.
Для расчета реальной продолжительности включения ПВ приводов подъема тележки и моста рассчитываем время работы данных приводов.
 (2.1)
(2.1)
 (2.2)
(2.2)
 (2.3)
(2.3)
где vn, vТ, vМ – скорость подъема, тележки, моста, м/с
H – высота подъема, м
Lм – пролет моста, м
Lпп – длина подкрановых путей, м
Рассчитываем суммарное время работы крана
 (2.4)
(2.4)
Суммарное время цикла работы.
 (2.5)
(2.5)
Продолжительности включения приводов подъема тележки и моста в цикле работы крана.
 (2.6)
(2.6)
 (2.7)
(2.7)
 (2.8)
(2.8)
3 РАСЧЕТ И ВЫБОР МОЩНОСТИ ДВИГАТЕЛЯ ПОДЪЕМА.
3.1 Расчет статических нагрузок и предварительный выбор мощности
двигателя.
Статические нагрузки для двигателя подъема создаются силой тяжести по этому носят активный характер т.е. при подъеме масса груза мешает двигателю, при спуске помогает двигателю.
Сила тяжести при подъеме груза и пустого крюка.
 (3.1)
(3.1)
 (3.2)
(3.2)
где m – грузоподъемность, кг
 - без крюка, кг
- без крюка, кг
g – ускорение свободного падения, 9,8 м / 
Статическая мощность при подъеме.
 (3.3)
(3.3)
Статическая мощность при спуске груза в тормозном режиме.
 (3.4)
(3.4)
Статическая мощность при подъеме пустого крюка.
 (3.5)
(3.5)
где  - КПД при подъеме пустого крюка
- КПД при подъеме пустого крюка
 (3.6)
(3.6)
где  - коэффициент загрузки
- коэффициент загрузки
 (3.7)
(3.7)
Статическая мощность при спуске силового крюка в силовом режиме.
 (3.8)
(3.8)
Эквивалентная мощность двигателя подъема.
 (3.9)
(3.9)
Номинальная мощность двигателя подъема выбирается по условию:
 (3.10)
(3.10)
где  - коэффициент запаса, 1,1-1,3
- коэффициент запаса, 1,1-1,3
По условию 3.10 выбираем асинхронный двигатель с фазным ротором серии МНТ 112-6 при ПВ=25% [1, табл. 1-3].

3.2 Проверка двигателя на нагрев, пусковую и перегрузочную
способность.
Выбранный двигатель при пуске и торможении перегревается пусковыми и тормозными токами, что может привести пробои изоляции двигателя. Для проверки двигателя на нагрев необходимо рассчитать момент, действующий в приводе за цикл работы крана.
Для уменьшения скорости рабочего механизма и увеличения тягового усилия на валу двигателя устанавливаем редуктор с придаточным числом.
 (3.11)
(3.11)
где  - число оборотов двигателя, об/мин
- число оборотов двигателя, об/мин
 - радиус барабана подъема лебёдки, м
- радиус барабана подъема лебёдки, м
 - придаточное число полиспаста
- придаточное число полиспаста
По справочнику [1, табл. 19] выбираем к установке трехступенчатый редуктор с передаточным числом  .
.
Статический момент при подъеме груза.
 (3.12)
(3.12)
Статический момент при спуске груза.
 (3.13)
(3.13)
Статический момент при подъеме пустого крюка
 (3.14)
(3.14)
Статический момент при спуске пустого крюка.
 (3.15)
(3.15)
Выбранный двигатель проверяем на перегрузочную способность по условию:
 (3.16)
(3.16)
где  - коэффициент, учитывающий возможное снижение напряжения сети на 15% и квадратичную зависимость
- коэффициент, учитывающий возможное снижение напряжения сети на 15% и квадратичную зависимость  .
.
При выполнении данного условия двигатель проходит проверку на перегрузочную способность.
Момент инерции при подъеме груза.
 (3.17)
(3.17)
где  - момент инерции двигателя,
- момент инерции двигателя, 
 - угловая скорость двигателя,
- угловая скорость двигателя, 
 (3.18)
(3.18)
Момент инерции при подъеме и опускании пустого крюка.
 (3.19)
(3.19)
Время пуска двигателя при подъеме груза.
 (3.20)
(3.20)
где  - пусковой момент двигателя, который исходя из условий реостатного пуска равен:
- пусковой момент двигателя, который исходя из условий реостатного пуска равен:
 (3.21)
(3.21)
Оптимальное время пуска двигателя при подъеме груза от 1 до 5 сек.  .
.
Время пуска двигателя при спуске груза.
 (3.22)
(3.22)
Время пуска при подъеме пустого крюка.
 (3.23)
(3.23)
Время пуска при спуске пустого крюка.
 (3.24)
(3.24)
Среднее время работы привода с установившейся скоростью.
 (3.25)
(3.25)
 (3.26)
(3.26)
Эквивалентный момент двигателя за цикл работы двигателя подъема.

Номинальный момент двигателя.
 (3.27)
(3.27)
Выбранный двигатель проходит проверку на нагрев при выполнении условия  .
.
4 ВЫБОР УПРАВЛЯЮЩЕГО КОНТРОЛЛЕРА ДЛЯ ПРИВОДА
ПОДЪЕМА КРАНА.
Выбор управляющего контроллера для привода подъема крана.
Управляющие контроллеры крана осуществляют пуск, реверс, регулирования скорости, остановку двигателя. На кранах применяется два типа контроллеров:
· кулачковые
· магнитные
Силовые кулачковые контроллеры осуществляют непосредственное ручное переключение силовых цепей двигателя, характеризуются высокой ремонтной пригодностью при отсутствии автоматизации процессов пуском и торможением, низкой надежности при неправильной эксплуатации крановщиком, большие габариты в кабине крановщика, физические усилия при переключении. Применяются на кранах работающих в режимах Л и С при токах ротора до 63А.
Магнитные контроллеры это комплектное устройство состоящие из слаботочного команда-контроллера, контакторов вперед/назад, контакторов ускорения шунтирующих ступени пускорегулирующего реостата, реле времени. Магнитные контроллеры, силовые цепи переключают дистанционно в автоматическом режиме. Характеризуется автоматизация процесса пуска и торможения малыми габаритами в кабине крановщика. Возможность управлениями двигателя большой мощности, работающие в тяжелом и весьма тяжелом режимах. Недостатками магнитных контроллеров является низкая ремонтопригодность и высокая стоимость.
Выбор контроллера осуществляется по назначению привода, режима его работы, числу двигателей, по условию  .
.
где  - номинальный ток ротора двигателя подъема.
- номинальный ток ротора двигателя подъема.
Контроллер выбираем по справочнику [1, табл. 5,6].
Тип контроллера ККТ-61А
Исполнение двигателя – асинхронный двигатель с фазным ротором.
Назначение контроллеров – для однодвигательных приводов всех типов механизмов Л, С.

4.1 Расчет и выбор пускорегулирующих сопротивлений контроллера.
Осуществляют ограничение пусковых токов двигателя и регулирования скорости. Выполняются в виде стандартных ящиков собранных из чугунных плоских или константановых круглых секций.
Выбор ступеней сопротивлений осуществляется по стандартной разбивки суммарного сопротивления на ступени для выбранного контроллера.
Номинальное сопротивление ротора.
 (4.1)
(4.1)
где  - ЭДС между кольцами неподвижного ротора.
- ЭДС между кольцами неподвижного ротора.
Значение сопротивления в процентах и ток допустимы на каждой ступени, заносим в табл. 4.1.
Таблица 4.1 – Разбивка сопротивлений по ступеням.
| Ступени | R,% | I, % | 
| 
|
| Р1-Р5 Р5-Р61 Р61-Р6 Р2-Р4 Р4-Р62 Р62-Р6 Р3-Р6 | 1,603 10,485 4,626 0,555 5,366 2,158 3,762 | 5,51 3,61 3,61 11,21 6,65 6,65 9,5 |
По расчетным значениям сопротивления с учетом протекающего по ним тока выбираем стандартный ящик сопротивления, значения заносим в табл. 4.2.
Таблица 4.2 – Значение выбранных сопротивлений.
| Ступени | Сопротивления, Ом | Тип блока Rобщ, Ом | Ток ступени, А | ||||
| Требуемое | Подобранное | Требуемое | Подобранное | ||||
| Р1-Р5 | 1,63 | 1,45 | ИРАК.434331.003-04 1х1,45 | 5,51 | 14,5 | ||
| Р5-Р61 | 10,48 | 11,7 | ИРАК.434331.003-05 3х3,9 | 3,61 | |||
| Р61-Р6 | 4,626 | 4,35 | ИРАК.434331.003-04 3х1,45 | 3,61 | 14,5 | ||
| Р2-Р4 | 0,555 | 0,44 | ИРАК.434331.004-11 1х0,44 | 11,21 | |||
| Р4-62 | 5,366 | 7,8 | ИРАК.434331.003-05 2х3,9 | 6,65 | |||
| Р62-Р6 | 2,158 | 2,9 | ИРАК.434331.003-04 2х1,45 | 6,65 | 14,5 | ||
| Р3-Р6 | 3,762 | 3,9 | ИРАК.434331.003-05 1х3,9 | 9,5 | |||
5 РАСЧЕТ И ВЫБОР ТОРМОЗНЫХ УСТРОЙСТВ КРАНА.
Для фиксации механизма крана при отключении электроснабжения применяется нормально закрытые, колодочные, дисковые и ленточные тормоза приводима в движении электромагнитным или электрогидравлическим приводом.
Электромагнитный тормоз характеризуется высоким быстродействием при низкой надежности из за резких срабатываний возникает перекос рычагов при этом пусковой ток катушки в 10-15 раз превышает номинальное значение в результате катушка может выгореть.
Электрогидротолкатель это комплектное устройство состоящее из насоса, гидроцилиндра характеризуется высокой надежностью большими тяговыми усилиями при низком быстродействии.

Рисунок 4.1 – Схема включения однофазного электромагнита МО.
Расчет и выбор тормоза осуществляется по тормозному моменту.
 (5.1)
(5.1)
Тормоз выбираем по справочнику [1, табл. 7, 8] по условию 
где  = 1,5
= 1,5

По условию [5.1] выбираем тормоз:
ТКТ 200
Диаметр шкива 200мм
Тормозной момент 160 
Тип электромагнита МО 200Б
6 РАСЧЕТ И ВЫБОР КАБЕЛЕЙ И ТРОЛЛЕЙ КРАНА.
Токопровод к электрооборудованию крана осуществляется через главный (цеховой) троллей, через токосъемник получает питание вводный, гибкий, шланговый кабель или вспомогательный троллей, который подает питание на рубильник защитной панели. От защитной панели гибкими, шланговыми кабелями подается питание к двигателю подъема тележки моста.
Расчет и выбор кабелей осуществляется по нагреву с проверкой их на потерю напряжения.
Условие выбора кабеля по нагреву:
 (6.1)
(6.1)
где  - номинальный ток статорных обмоток двигателя, А.
- номинальный ток статорных обмоток двигателя, А.
 (6.2)
(6.2)
где  - КПД двигателя
- КПД двигателя
Выбранный кабель проверяем на  , в цеховых сетях составляет не более 5%.
, в цеховых сетях составляет не более 5%.
 (6.3)
(6.3)
где  - удельная проводимость, для медного кабеля,
- удельная проводимость, для медного кабеля, 
 - длина кабеля, м
- длина кабеля, м
 - сечение кабеля
- сечение кабеля
Кабель выбираем по справочнику [1, табл. 12], результаты выбора сводим в табл. 6.1.
Таблица 6.1 – Выбор кабелей для двигателя крана.
| Наименование двигателя | Рном, кВт | ƞ | I1ном, А | s, мм2 | l, м | ΔU, % | |
| Подъем | 5,3 | 0,69 | 34,6 | 0,6 | |||
| Тележка | 1,7 | 0,6 | 12,7 | 1,3 | |||
| Мост1 | 1,7 | 0,6 | 12,7 | 1,3 | |||
| Мост2 | 1,7 | 0,6 | 12,7 | 0,2 | |||
Выбор кабелей от троллей до защитной панели осуществляется по расчетам мощности для группы двигателей.
 (6.4)
(6.4)
где  и
и  - опытные коэффициенты, зависящие от работы крана
- опытные коэффициенты, зависящие от работы крана
[1, табл. 10].
 - суммарная мощность трех наиболее крупных двигателей крана.
- суммарная мощность трех наиболее крупных двигателей крана.
 - суммарная мощность всех двигателей крана.
- суммарная мощность всех двигателей крана.
Расчетный ток вводного кабеля.
 (6.5)
(6.5)
Где  - средний КПД
- средний КПД
 - мощность двигателя до 30кВт, равен 0,8.
- мощность двигателя до 30кВт, равен 0,8.
По условию 6.1 на ввод применяем гибкий, шланговый кабель с медными жилами, сечением 10, с длительным допустимым током 60А.
Выбранный кабель проверяем на потерю напряжения по формуле 6.3
 (6.6)
(6.6)
Троллей выполняется в виде уголка швеллера или рельса выбирается по условию 6.1 с учетом пускового тока двигателя.
 (6.7)
(6.7)
где  - кратность пускового тока равная 2,5
- кратность пускового тока равная 2,5
I=315А
S=480 мм.кв.
50х50х5
Выбранный троллей выбираем на потерю напряжения
 (6.8)
(6.8)
где  - длина подкрановых путей.
- длина подкрановых путей.
Если потери напряжения превышают допустимые 5%, то троллей
запитывается с нескольких точек.
 (6.9)
(6.9)

7 РАСЧЕТ И ВЫБОР АППАРАТОВ ЗАЩИТЫ МОСТОВОГО КРАНА
Все аппараты защиты мостового крана находятся в защитной панели которая размещена в кабине крановщика.
В защитной панели размещены вводный рубильник QS, релейный контактор КМ1, вводный реле максимального тока КАm, индивидуальная реле максимального тока защищающие двигатели подъема тележки и мостов. Схема управления ленейного контактора, включается контакты реле максимально тока, конечники люка и дверей, контакт ключ-бирки. В кулачковых контроллерах цепь питания линейного контактора «собирается» при установке всех контроллеров крана в нулевую позицию, в цепь включаются конечники ограничивающие крайнее положение механизмов.

Рисунок 7.1 – Схема электрическая принципиальная защитной панели крана.
Выбор вводного реле максимального тока осуществляется по 2 условиям
 (7.1)
(7.1)
где  - пиковый ток равный сумме пускового тока наибольшего по мощности потребителя и номинальных токов всех остальных потребителей.
- пиковый ток равный сумме пускового тока наибольшего по мощности потребителя и номинальных токов всех остальных потребителей.
Выбор индивидуальных реле максимального тока осуществляется по
условиям
 (7.2)
(7.2)
Таблица 7.1 – Выбор реле максимального тока.
| Назначение реле | I1ном, А | Iпуск, А | Iуст, А | Iном.к, А | Предел рег-ия | Тип реле |
| Ввод кАm | 51,5 | 124,6 | 155,75 | 80-250 | 2ТД.304096-10 | |
| Подъем кAm1 | 34,6 | 86,5 | 108,125 | 50-160 | 2ТД.304096-12 | |
| Тележка кАm2 | 12,7 | 31,75 | 39,68 | 12-40 | 2ТД.304096-18 | |
| Мост кАm3 | 25,4 | 63,5 | 79,375 | 30-100 | 2ТД.304096-14 |
Реле выбираем по справочнику [1, табл. 16]. Результат расчета и выбора сводим в таблицу 7.1.
Выбор вводного рубильника осуществляется по условиям
 (7.3)
(7.3)
где к – кратность пускового тока, равная 2,5.
ВР32-31А 30220
 =100А
=100А
m = 0,9кг
Направление 1
Без дугагасительных камер, несъемная рукоятка.
Линейный контактор выбираем по расчетному току группы двигателей
 (7.4)
(7.4)
 =380В, трехполюсный число блок контактов 1.
=380В, трехполюсный число блок контактов 1.
КТ-6013 100А 380В 3NO+3NC
 100А
100А
=380В
m=8кг
дополнительная частота включения 600.
Для механического подъема выбираем рычажные конечные выключатели с самовозвратом КУ-703.
Для блокировки дверей и люка выбираем нажимные конечники серии
ВК-200.
Для включения цепи управления применяем кнопку КУ121/2 с напряжением 380В, длительно допустимы ток 5А, с двумя контактами.
8 ОПИСАНИЕ СХЕМЫ КОНТРОЛЛЕРА ККТ-61А
Схемы управления крановыми двигателями могут быть симметричными и несимметричными относительно нулевого положения силового контроллера или командоконтроллера. Симметричные схемы применяют для приводов механизмов передвижения, а в некоторых случаях и для приводов механизмов подъема. В таких схемах при одинаковых по номеру положениях рукоятки (маховичка) контроллера при движении в разные стороны двигатель работает на аналогичных характеристиках w = ¦ (М). Несимметричные схемы используют для приводов механизмов подъема, когда при подъеме и спуске груза требуется, чтобы двигатель работал на различных характеристиках, так как обычно V¯¹V.
На рисунке показана электрическая схема управления асинхронным двигателем с фазным ротором посредством контроллера типа ККТ-61А, который имеет симметричную схему и применяется для механизмов передвижения и подъема.
Напряжение на контроллер подается через панель ПЗК. Одна фаза ЛЗ питающей сети подводится к статору двигателя Д непосредственно, а две фазы Л1 и Л2— через контроллер. В первом положении Вперед (Подъем) рукоятки контроллера замкнуты контакты КЗ, К.7 (рис. б) и статор двигателя включается в сеть при полностью введенных сопротивлениях в цепи ротора. В первом положении Назад (Спуск) замкнуты контакты К1 и К5, чем обеспечивается изменение порядка чередования фаз напряжения на зажимах статора С1, С2 и СЗ. Одновременно со статором двигателя в сеть включается тормозной электромагнит ЭмТ, растормаживающий механизм (троллейный токоподвод, показанный на схеме, применяется только для привода подъема).
При дальнейшем перемещении рукоятки контроллера в положения 2—5 Вперед (Подъем) или Назад (Спуск) замыкаются контакты К2, К4, К6, К8, К10 и шунтируются ступени пусковых резисторов в цепи ротора двигателя. Резисторы выводятся по фазам несимметрично, что позволяет уменьшить число переключающих контактов контроллера при требуемом числе пускорегулировочных ступеней и получить механические характеристики (рис.3-10, в), обеспечивающие
требуемый режим работы механизма. При Спуске оператор должен переводить рукоятку контроллера из одного положения в другое с некоторым интервалом времени, в противном случае могут возникнуть недопустимые броски токов и моментов двигателя. Характеристика 1 с малым моментом при w =0 используется для устранения люфтов в редукторах и слабины канатов при пуске двигателя.
При опускании средних и тяжелых грузов с полной скоростью двигатель работает в генераторном режиме. Пониженную угловую скорость в этом случае можно получить на положении контроллера 1 Подъем, т.е. при работе двигателя в режиме противовключения. Легкие грузы, не преодолевающие трение в механизме, и пустой крюк опускаются, при работе двигателя в двигательном режиме на положениях контроллера Спуск.
Схема обеспечивает защиту двигателя от перегрузок по току с помощью группового максимального реле РМ (РМ1—РМЗ). С помощью контактов К11, К12 создаются цепи конечной и нулевой защиты. Все виды защит действуют на отключение контактора КЛ, как и предусмотрено в панелях ПЗК.
Для управления двигателями постоянного тока последовательного возбуждения применяются контроллеры типа ККП-101 (для механизмов передвижения), которые имеют симметричную схему, и типа ККП - 102 (для
механизмов подъема) с несимметричной схемой.
9 ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ ЭЛЕКТРООБОРУДОВАНИЯ КРАНА
Техническое обслуживание электрической части крана заключается в систематическом внешнем осмотре и обслуживании в процессе работы следующих основных узлов и элементов: двигателей, генераторов, контроллеров, сопротивлений, токоприемника, системы освещения и сигнализации, панелей, приборов обеспечения безопасности.
Объем работ, выполняемых при техническом обслуживании, зависит от обслуживаемого агрегата и узла крана.
ЭЛЕКТРОДВИГАТЕЛИ.
При наружном осмотре двигателя необходимо убедиться, что кожух вентилятора не имеет вмятин, нет обрывов проводов, ослабевших болтов крепления к раме. Корпус двигателя очищают от пыли концами и тряпками.
При осмотре контактных колец проверяют, нет ли металлической или угольной пыли на поверхности их изоляции, так как пыль может явиться причиной короткого замыкания. Кольца рекомендуется протирать сухой чистой тряпкой, а в случае оседания грязи и жира — тряпкой, слегка смоченной в бензине. Если на кольцах заметны следы обгорания, их зачищают стеклянной бумагой № 100—200, обязательно прикрепленной к деревянной колодочке. В случае обнаружения значительных неровностей контактных поверхностей колец или их эксцентричного положения, наличия биения при вращении, а также других более серьезных дефектов вызывают ремонтных рабочих. При замене изношенных колец новыми машинист следит, чтобы кольца снимали только съемником (струбциной). При получении отремонтированного двигателя или напрессовке новых колец обращают внимание на их положение на валу двигателя (без перекосов и эксцентриситета).
Уход за щетками и щеткодержателями заключается в проверке состояния их поверхности, величины давления на контактных кольцах, свободы движения, бесшумности работы.
Надежность работы подшипников двигателя зависит от правильности их смазки. В процессе эксплуатации нельзя допускать перегрева и повышенного шума подшипников: они должны нагреваться не выше 95° С и при работе издавать равномерный незначительный шум.
При работе крана уход за электродвигателями включает в себя контроль за нагрузкой и температурой нагрева, проверку сопротивления изоляции обмотки, а также периодическую смазку деталей. Величину нагрузки двигателя определяют по показаниям амперметра, отмечающего силу тока в двигателе.
Электродвигатели кранов подвергают еженедельному периодическому осмотру производят наружную очистку, проверяют состояние щеток и щеткодержателей, контактных колец, измеряют сопротивление изоляции, проверяют подшипники.
Текущие, средние и капитальные ремонты проводят с полной разборкой двигателей в специальных мастерских и на заводах (при текущем ремонте возможна частичная разборка), располагающих соответствующим оборудованием, материалами и квалифицированными рабочими. Сроки проведения и объем ремонтов в значительной степени зависят от условий эксплуатации крана (ухода за ним, срока службы, загрузки).
КОНТРОЛЛЕРЫ.
При осмотре контроллеров проверяют их чистоту, состояние контактных поверхностей, наличие смазки, а также затяжку болтов, наличие прижимных шайб. От пыли и грязи контроллеры очищают тряпкой, смоченной в керосине; элементы, покрытые изоляцией, протирают только сухой тряпкой. При осмотре проверяют правильность вращения вала с шайбами и роликов с контактами, кулачков и роликов, а также чистоту контактных поверхностей и износ кулачков.
В случае достижения предельного износа (до 5 мм) кулачки заменяют новыми. Крепление вводных проводов должно быть надежным, без ослабления.
Машинист должен следить за тем, чтобы крышки контроллеров были закрыты и под них поставлены исправные уплотняющие прокладки во избежание попадания грязи, пыли и влаги внутрь контроллера.
СОПРОТИВЛЕНИЯ.
При периодических осмотрах сопротивлений контролируют затяжку всех соединений, особенно контактов, чистоту поверхностей, сохранность элементов и проверяют, не попали ли в сопротивления посторонние предметы (масло, стружка, бумага), которые при нагреве элементов сопротивления могут загореться. Металлические предметы могут вызвать замыкание секций или соединение их с корпусом, что в свою очередь повлечет за собой подгорание контактов контроллеров, искрение колец ротора, повышенный нагрев самих сопротивлений и контактов, нарушение в управлении электродвигателем.
КОНТАКТОРЫ.
Для проверки и устранения неисправностей контактор разбирают: устанавливают точность центрирования сердечника относительно катушки; сохранность короткозамкнутого витка, уложенного в сердечник; свободу вращения в шарнире якоря; отсутствие контактов при прохождении якоря у стенки камеры.
В неисправном контакторе контакты могут не разомкнуться при выключении тока в цепи управления. В случае неисправности контактора работу на кране прекращают во избежание возникновения аварии или пожара.
КОНЕЧНЫЕ ВЫКЛЮЧАТЕЛИ.
От надежности работы конечных выключателей зависит работа ограничителей (грузоподъемности, высоты подъема крюка, наклона стрелы, угла поворота крана), т. е. основных приборов обеспечения безопасности, поэтому машинист обязан до начала работы на кране убедиться в исправности конечных выключателей.
При уходе за выключателями проверяют их состояние и надежность действия. Контакты должны быть чистыми; пружины, возвращающие валик с контактами в нулевое положение, — работать нормально.
ПЛАВКИЕ ПРЕДОХРАНИТЕЛИ.
Уход за ними заключается в своевременной смене расплавленных элементов стандартными калиброванными элементами в строгом соответствии с инструкцией по эксплуатации крана. Применение временных самодельных вставок в виде проволочек или пластинок категорически запрещается В случае короткого замыкания или длительной перегрузки крана самодельная вставка может не расплавиться, что повлечет за собой тяжелые последствия — сгорание обмотки двигателя, подводящих проводов и даже пожар на машине.
ЭЛЕКТРИЧЕСКОЕ ОСВЕЩЕНИЕ И СИГНАЛИЗАЦИЯ.
При уходе за системой освещения проверяют надежность соединений проводов в местах подключения к оборудованию арматуры; сохранность изоляции; правильность установки плавких вставок в предохранителях; отсутствие на проводах горючего и смазки; чистоту проводки, плафонов и прожекторов. В местах присоединения проводки должен быть обеспечен надежный контакт, исключающий искрение и нагрев контактируемых поверхностей. Крепление плафонов, проводов внутри кабины и прожекторов на стреле и крыше кабины должно быть прочным, качка их и повышенная вибрация не допускаются.
10 ТЕХНИКА БЕЗОПАСНОСТИ ПРИ ОБСЛУЖИВАНИИ
ЭЛЕКТРИЧЕСКОГО ОБОРУДОВАНИЯ
Общие требования безопасности.
К выполнению работ электромонтера по ремонту и обслуживанию электрооборудования грузоподъемных машин допускаются лица не моложе 18 лет, прошедшие медицинское освидетельствование, обученные по соответствующей программе и аттестованные квалификационной комиссией, а также получившие инструктаж по безопасным методам работы непосредственно на рабочем месте с оформлением в Журнале регистрации инструктажа.
Электромонтер, допущенный к ремонту и обслуживанию грузоподъемных машин, должен иметь группу по электробезопасности не ниже III.
Выполнение работ по распоряжению должно производится двумя лицами, имеющими группу по электробезопасности не ниже III, с полным снятием напряжения, с выполнением необходимых организационных и технических мероприятий согласно требованиям Правил техники безопасности при эксплуатации электроустановок потребителей с записью в оперативном журнале.
Периодический осмотр электрооборудования грузоподъемных машин имеет цель выявить и устранить возможные неисправности в электрооборудовании, приборах и устройствах безопасности, в силовых цепях, цепях управления, сигнализации, проверить исправность защитных средств по технике безопасности и средств пожаротушения и подтвердить в журнале периодических осмотров, что электрооборудование грузоподъемных машин находится в исправном состоянии.
При проведении осмотра электрооборудования кранов регулировка и включение механизмов должны производиться по сигналу лица, осуществляющего осмотр.
При передвижении моста крана лица, производящие осмотр и устранение неисправностей электрооборудования крана, должны находиться в кабине или на настиле моста, при этом следует остерегаться задевания за выступающие части перекрытия, колонны, арматуру.
При выходе на настил галереи крана рубильник в кабинете машиниста должен быть отключен и на его приводе вывешен плакат: "Не включать -работают люди". Снимать плакат только по распоряжению оперативного персонала.
При проведении осмотра и устранении неисправностей электрооборудования крана необходимо соблюдать все меры предосторожности, применять необходимые исправные и испытанные защитные средства.
По окончании ремонта и осмотра все снятые ограждения на электрооборудовании и на электроаппаратах должны быть поставлены на место и укреплены.
При устранении неисправностей, регулировке и осмотрах электрооборудования крана запрещается:
- входить на кран и сходить с него во время его движения;
- выходить на крановые пути, ходить по крановым путям, перелезать с одного крана на другой;
- производить регулировку тормоза механизма при поднятом грузе, а также устанавливать приспособления для растормаживания тормоза вручную;
- оставлять на настиле галереи или на тележке инструмент, а также незакрепленное оборудование и детали;
- сбрасывать инструмент, материалы и запасные части с крана.
При выполнении всех работ электромонтер должен изъять у крановщика ключ-марку в порядке, установленном на предприятии по применению ключ-марочной системы.
При плановом ремонте
Вывод крана в ремонт должен производиться лицом, ответственным за содержание грузоподъемных машин в исправном состоянии, в соответствии с графиком планового ремонта с оформлением наряда для работы в электроустановках.
Для обеспечения безопасности при проведении ремонта электрооборудования крана необходимо поставить его на ремонтную площадку, произвести необходимые отключения, привод рубильника закрыть на замок, вывесить предупредительные плакаты по технике безопасности, установить переносное заземление и сделать ограждение под ремонтной площадкой.
Ремонт электрооборудования крана может производиться электромонтерами, имеющими удостоверение на право ремонта и обслуживания грузоподъемных машин, не менее двух человек с группой по электробезопасности не ниже III.
Не допускать на кран посторонних лиц. Запрещается выход на крановые пути без оформления специального разрешения.
Требования безопасности в аварийных ситуациях
При несчастном случае пострадавший или очевидец, бывший при этом, обязан немедленно известить мастера или начальника участка, которые должны организовать оказание первой (доврачебной) помощи пострадавшему и направить его в лечебной учреждение. При тяжелом несчастном случае немедленно вызвать скорую помощь и известить администрацию.
Устранение неисправностей электрооборудования грузоподъемных машин должно производиться только при отключении крана от питающей сети.
ЗАКЛЮЧЕНИЕ
Целью данной курсовой работы является выбор электрооборудования для мостового крана грузоподъемностью 5 тонн. Для этого нам понадобилось изучить конструкцию мостового крана и его принцип действия. В первом пункте проекта приведена конструкция двухбалочного мостового крана, а также кинематическая схема. Во втором пункте приведены требования к электрооборудованию мостового крана. В третьем пункте приведен расчет и выбор мощности двигателя подъема. В результате расчета был выбран двигатель МНТ 112-6 для привода подъема. Также были выбраны двигатели для привода моста МTF 011-6 и тележки МТF 011-6. В четвертом пункте был выбран контроллер ККТ-61А и пускорегулирующие устройства. В пятом пункте было выбрано тормозное устройство, электромагнитный тормоз ТКТ 200, тип электромагнита МО200Б. В шестом пункте были выбраны питающие кабели и троллеи крана. В седьмом пункте выбраны элементы защитной панели.
Список литературы
1 Правила устройств и безопасной эксплуатации грузоподъемных кранов.
2 Яуре А.Г., Певзнер Е.М. Крановый электропривод. Справочник. – М.: Энергоатомиздат, 1998
3 Соколова Е.М. Электрическое и электромеханическое оборудование. – М.: Мастерство, 2001
4 Алиев И.И. Справочник по электротехнике и электрооборудованию. – М.: Высшая школа, 2000
5 Богорад А.А., Загузин А.Т. Мостовые краны и их эксплуатация: М.: Высшая школа, 1984. - 184 С.
6 Гохберг М.М. и др. Справочник по кранам: Т.2. л.: Машиностроение, 1988. - 1095 С.
7 Зимин Е.Н., Преображенский В.И., Чувашов И.И. Электрооборудование промышленных предприятий и установок: Изд.2-е. М.: Энергоатомиздат, 1981. - 552 С.
8 Рабинович А.А. и др. Крановое электрооборудование: М.: Энергия, 1979. - 240 С.
9 Руденко Н.Ф., Александров М.П., Лысяков А.Г. Курсовое проектирование грузоподъёмных машин: Изд. 3-е. М.: Машиностроение, 1971. - 464 с.
10 Турков В.Н. Мостовые и козловые электрические краны: устройство, эксплуатация, ремонт: М.: Транспорт, 1994. - 256 С.
11 Колпачков В.И., Ящура А.И. Производственная эксплуатация, техническое обслуживание и ремонт энергетического оборудования: М.: Изд. Энергосервис, 1999. - 437 С.
12 http://stroy-technics.ru
13 http://www.ngpedia.ru
| <== предыдущая лекция | | | следующая лекция ==> |
| П.7.3. ОПТИМИЗАЦИЯ СОДЕРЖАНИЯ ПУТИ ПО ЭКОНОМИЧЕСКИМ КРИТЕРИЯМ | | | КОРРЕКЦИОННОЙ ПЕДАГОГИКИ |
Не нашли, что искали? Воспользуйтесь поиском: