ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Коротка характеристика законів регулювання
Законом регулювання називається залежність, що описує як зміниться регулююча дія регулятора, в залежності від величини і знаку ∆Х
Up = f(∆X)
Або закон регулювання це залежність, що описує, як переміщується рухома частина РО під дією автоматичного регулятора при появі похибки регулювання
Закон безперервної дії має бути реалізований сукупністю відповідного регулятора і виконавчого механізму неперервної дії зі змінною швидкістю переміщень (приладами відповідних модифікацій, у яких є реостатний вихід, балансні реле або ВМ типу МЕО, МЕОК…).
Існує 3 простих закони регулювання:
1. Пропорційний – П
2. Інтегральний –І
3. Диференційний - Д
З них утворюють більш складні:
1. Ізодромне регулювання – ПІ
2. Пропорційне регулювання з упередженням - ПД
3. Ізодромне з упередженням - ПІД
У реалізації закону регулювання найважливішу роль відіграє лінія зворотного зв'язку.
Дія П - та ПД - регуляторів формується від'ємним жорстким зворотнім зв'язком, а дія ПІ - та ПІД-регуляторів формується від'ємним гнучким зворотнім зв'язком.
У наш час широке впровадження МПК дозволяє налаштувати будь-який з законів, лише змінюючи параметри настройки, не вносячи жодних змін в сам регулятор.
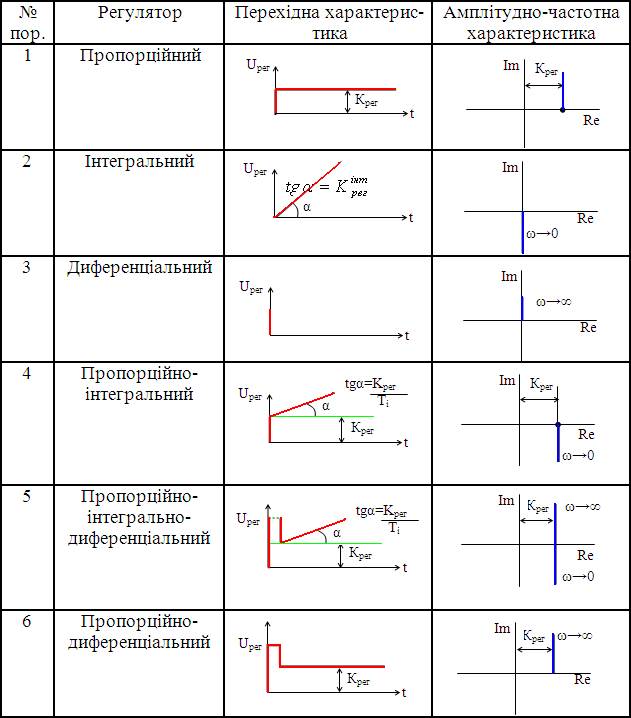
Рис.2. Перехідна і амплітудно-фазова характеристики законів регулювання безперервної дії
П - регулювання
Найбільшу швидкодію забезпечує П - закон управління. Проте, якщо коефіцієнт підсилення П - регулятора (Кр) малий (найчастіше це спостерігається в системах із запізненням), то такий регулятор не забезпечує високої точності регулювання, оскільки з'являється статична похибка. Якщо Кр≥10, то П - регулятор прийнятний, а якщо Кр<10, то потрібне введення в закон управління інтегральної складової.
У П регуляторах управляюча дія пропорційна сигналу непогодження. Тобто регулюючий параметр змінюється пропорційно до похибки регулювання. Рівняння динаміки П - регулятора:

Процес регулювання почнеться, з появою відхилення регульованої величини від заданого значення, а завершується тоді, коли величина непогодження перестане змінюватись.
Недоліком П - регулятора є статична похибка,величина якої залежить від коефіцієнта передачі регулятора Кр ‑ чим він більший, тим менша статична похибка.
Графік дії П – регулятора на рис. 3

Рис. 3. Графік дії П - регулятора при появі сигналу розузгодження
а) ідеального б) реального
По динамічними властивостями ідеальний П - регулятор – підсилювальна ланка, а реальний ‑‑ аперіодична ланка 1-го порядку
Не нашли, что искали? Воспользуйтесь поиском: