ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Расчет азимутальной поправки и условного магнитного склонения.
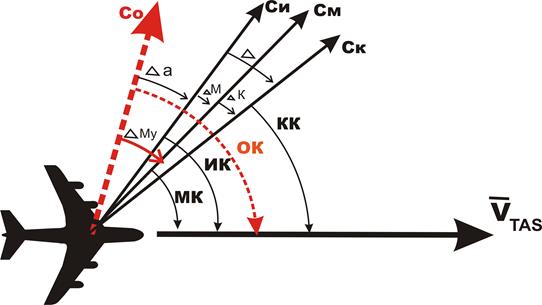
Виды курсов и взаимосвязь между ними
Опорный меридиан для удобства совмещают или с истинным или магнитным меридианом аэродрома вылета или каждого ППМ.
При автоматизированной навигации, а также при полетах в полярных районах используется истинный опорный меридиан.
При неавтоматизированной навигации в экваториальных и средних широтах используется магнитный опорный меридиан.
Для перехода от одной системы измерения курса к другой используются поправки: Dа, DМ, DМУ
Азимутальная поправка Dа – угол, между опорным и истинным меридианами.
Магнитное склонение DМ – угол между истинным и магнитным меридианом в данной точке.
Условное магнитное склонение DМУ – угол между опорным и магнитным меридианами.
Расчет поправок для определения положения опорного меридиана в любой точке маршрута вызван необходимостью периодической проверки показаний гироскопического курсового прибора.
Причины:
- невозможность изготовления абсолютно точного прибора, не имеющего инструментальных погрешностей (собственный уход гироскопа);
- неточная выставка оси гироскопа по опорному меридиану;
- неточный учет широты пролетаемой местности.
Неучтенный своевременно уход гироскопа может привести к уклонению от ЛЗП и выходу ВС за пределы трассы!!!

Проекция Меркатора (σсх =0°)
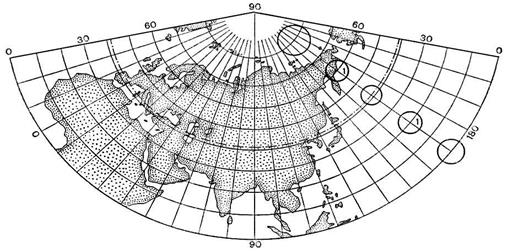
Проекция Ламберта (σсх =(λт – λ0)×sinφср)
Если в качестве опорного меридиана выбран истинный меридиан

В этом случае для любой точки маршрута азимутальная поправка равна углу схождения меридианов, но с противоположным знаком:
σсх = (λт – λ0) × sinφср → Dа = – sсх
Dа = (lо – λт) × sinjСР,
где, sсх – угол схождения меридианов;
lо – долгота опорного меридиана;
λт – долгота точки, для которой рассчитывается поправка;
jСР – средняя широта в зависимости от картографической проекции.
Условное магнитное склонение для любой точки маршрута:
DМУ = Dа + DМ = (lо – λт) × sinjСР + DМ.
Если в качестве опорного меридиана выбран магнитный меридиан

В этом случае азимутальная поправка и условное магнитное склонение для любой заданной точки маршрута определяется по формулам:
σсх = (λт – λ0) × sinφср
Dа=-(σсх+DМО)
Dа = (lо – λт) × sinjСР – DМО
DМУ = Dа + DМ = (lо – λт) × sinjСР – DМО + DМ
на опорном меридиане Dа = – DМО, DМУ = 0
Информация о Dа и DМУ может наноситьсякарту через 1-2° долготы.
4.Использование инерциальных навигационных систем
Принцип работы инерциальной навигационной системы (ИНС) / Inertial Navigation System (INS) основан на измерении ускорений ВС по осям выбранной системы координат.
Ускорения измеряются устройствами, называемыми акселерометрами.
Ускорение является производной от скорости (характеризует быстроту ее изменения). Соответственно, скорость – это производная расстояния.
Операцией, обратной дифференцированию (взятию производной), является интегрирование. Если измеренное ускорение известно, то после его интегрирования получим скорость. А после интегрирования скорости получим пройденное расстояние и в конечном итоге координаты ВС.
ИНС осуществляют счисление пути в сферической / геодезической системе координат и определяют широту и долготу.
Упрощенная блок-схема инерциального счисления
ИНС можно разделить на две группы:
- использующие гироплатформу (традиционные ИНС);
- не использующие гироплатформу (бесплатформенные ИНС - БИНС).
Первыми в 40-е годы ХХ века были разработаны и на протяжении
пятидесяти лет совершенствовались традиционные INS.
В традиционных ИНС акселерометры установлены на гироплатформе, которая на протяжении всего полета располагается строгогоризонтально и ориентирована по направлению истинного меридиана. При этом акселерометры независимо от поворотов ВС всегда ориентированы по осямсистемы координат, связанной с Землей.
В таких ИНС два акселерометра расположены в горизонтальной плоскости и ориентированы на север и восток. Третий расположен вертикально и ориентирован вверх.
Гироплатформа удерживается в нужном положении с помощью гироскопов – таких же, как и в гироскопических курсовых приборах, но гораздо более точных, имеющих малый собственный уход.
В 80-90-е годы ХХ века стали развиваться БИНС, которые называют системами на «лазерных гироскопах».
С помощью лазерного кольцевого гироскопа (ЛКГ) можно измерить угловую скорость вращения.
В БИНС используется три таких лазерных гироскопа, измеряющих угловые скорости вращения вокруг трех перпендикулярных осей.
Если в любой момент времени известна угловая скорость, то в любой момент можно рассчитать угол, на который повернулась система по сравнению с первоначальным положением (угловая скорость – производная угла поворота). Следовательно, сам угол можно определить путем интегрирования угловой скорости. Эту задачу непрерывно решает вычислитель БИНС.
В БИНС акселерометры жестко закреплены на ВС, ориентированы по его строительным осям и вращаются вместе с ним, измеряя ускорения вдоль осей самолета (вперед, вправо, вверх).
Значения ускорений по осям земной системы координат получаются расчетным путем.
Преимущества ИНС перед другими навигационными системами:
· автономность (не требуется наземное оборудование);
· может использоваться над всей территорией земного шара;
· абсолютная помехозащищенность;
· определение всех основных параметров для навигации.
Недостатки ИНС:
· необходимость знания начальных координат;
· первоначальная выставка;
· возрастание погрешностей счисления со временем полета и вытекающая отсюда необходимость коррекции координат.
Не нашли, что искали? Воспользуйтесь поиском: