ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Структура синхронной системы
Если число триггеров в последовательностной схеме велико, то неудобно (а часто невозможно) рассматривать схему как одно целое, поскольку число состояний такого конечного автомата слишком велико.
В большинстве случаев цифровые системы или подсистемы можно разбить на две или большее число частей. Независимо от того, что именно обрабатывается в цифровой системе, - числа, оцифрованный речевой сигнал, - можно считать, что в определенной части цифровой системы происходит запоминание, перенаправление, объединение или преобразование «данных» в самом общем виде; эту часть мы будем называть устройством обработки данных.
Что касается другой части - управляющее устройство, то она производит запуск или остановку устройства обработки данных, проверяет правильность его функционирования и, в зависимости от обстоятельств, решает, что надо делать дальше. Как правило, только управляющее устройство необходимо разрабатывать как конечный автомат.
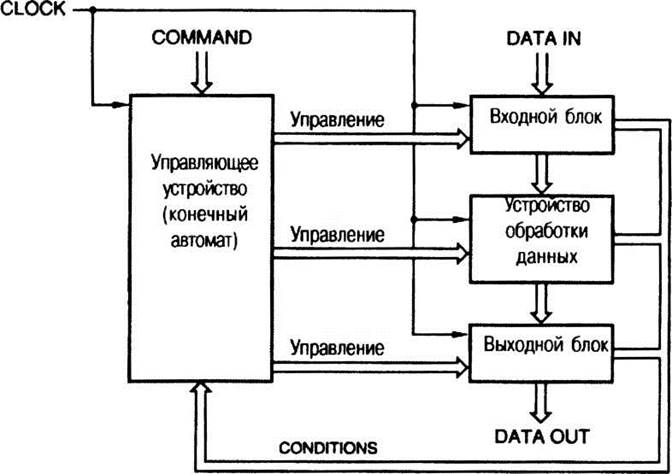 Рис. 8.79. Структура синхронной системы
Рис. 8.79. Структура синхронной системы
|
На рис. 8.79 представлена блок-схема системы, где, помимо управляющего устройства и устройства обработки данных, явным образом включены входной и выходной блоки.
Управляющее устройство представляет собой конечный автомат с командными входами и входами условий; сигналами на командных входах определяется функция, которую должен выполнить автомат, а сигналы на входах условий вырабатываются устройством обработки данных. На командные входы сигналы поступают от другой подсистемы или от пользователя, и ими устанавливается режим работы управляющего конечного автомата. Сигналы на входах условий позволяют управляющему устройству изменить свое поведение, как того требуют обстоятельства, по результатам работы устройства обработки данных.
Ключевым моментом в структуре является то, что во всех блоках используется один и тот же общий тактовый сигнал.
Рис. 8.80 служит иллюстрацией того, что происходит в управляющем устройстве и в устройстве обработки данных в пределах одного периода тактового сигнала:
1. Спустя небольшое время после начала очередного периода устанавливается состояние управляющего устройства и принимают установившиеся значения регистровые выходные сигналы устройства обработки данных.
2. Затем, спустя время, определяемое задержкой комбинационной логики, устанавливаются значения сигналов на выходах типа Мура управляющего конечного автомата. Для устройства обработки данных эти сигналы являются управляющими входными сигналами. Именно ими определяется, какие функции выполняет устройство обработки данных на остающейся части периода тактового сигнала.
3. Ближе к концу периода тактового сигнала в устройстве обработки данных вырабатываются и становятся доступными управляющему устройству выходные сигналы условий типа обнаружения нуля или переполнения.
4. В конце периода тактового сигнала, к моменту времени, который непосредственно предшествует началу интервала, задаваемого временем установления, логикой переходов в управляющем конечном автомате определяется следующее состояние; оно зависит от текущего состояния, а также от сигналов на командных входах и входах условий. Примерно к этому же времени результаты вычислений в устройстве обработки данных оказываются готовыми к тому, чтобы быть загруженными в регистры этого устройства.
5. С приходом фронта тактового сигнала описанный цикл может повторяться.
Сигналы на управляющих входах устройства обработки данных, являющиеся выходными сигналами управляющего конечного автомата, могут быть сигналами типа Мура, Мили или сигналами на конвейерном выходе Мили; приведенные на рис. 8.80 временные диаграммы относятся к случаю выходов типа Мура.
Сигналы на выходах типа Мура или на конвейерных выходах типа Мили управляют работой устройства обработки данных в строгом соответствии с текущим состоянием и последними значениями входных сигналов, но это воздействие не зависит от сигналов условий, вырабатываемых устройством обработки данных в этом периоде тактового сигнала. Это повышает гибкость системы, но одновременно требует большего времени для правильной работы, поскольку много большими становятся задержки распространения сигнала, что приводит, как минимум, к увеличению требуемого периода тактового сигнала.
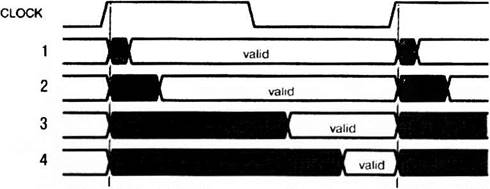 Рис. 8.80. События, происходящие в синхронной системе в пределах одного периодатактового сигнала
Рис. 8.80. События, происходящие в синхронной системе в пределах одного периодатактового сигнала
|
Не нашли, что искали? Воспользуйтесь поиском: