ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Равновесия механической системы
Схемы находящихся в равновесии механизмов показаны на рис. 54−58, а необходимые данные приведены в табл. 10.
Применяя принцип возможных перемещений и пренебрегая силами сопротивления, определить величину, указанную в предпоследнем столбце табл. 10.
Примечание. Механизмы в вариантах 3, 6, 10, 14, 16, 18, 19, 25 и 30 расположены в вертикальной плоскости, а остальные — в горизонтальной.
Пример выполнения задания (рис. 59). Дано:  Н, с=100Н/см;
Н, с=100Н/см;  см;
см;  см;
см;  см;
см;
Определить значение момента  , уравновешивающего находящийся в горизонтальной плоскости механизм в данном положении, если известно, что пружина растянута на величину
, уравновешивающего находящийся в горизонтальной плоскости механизм в данном положении, если известно, что пружина растянута на величину  см.
см.
Решение. Рассматриваемый механизм (рис. 59) находится
в равновесии под действием следующих активных силовых факторов: силы  и пары сил с моментом , а также сил тяжести звеньев механизма. Силу упругости пружины
и пары сил с моментом , а также сил тяжести звеньев механизма. Силу упругости пружины  как реакцию неидеальной связи условно переводим в разряд активных сил и изображаем на расчетной схеме. Остальные наложенные на механизм связи являются идеальными и поэтому их реакции на схеме не показываются.
как реакцию неидеальной связи условно переводим в разряд активных сил и изображаем на расчетной схеме. Остальные наложенные на механизм связи являются идеальными и поэтому их реакции на схеме не показываются.
Составим уравнение работ, выражающее принцип возможных перемещений:
 или
или 

 (1)
(1)
где  − модуль возможного перемещения
− модуль возможного перемещения  точки приложения активной силы
точки приложения активной силы  ;
; 
 − угол между векторами
− угол между векторами  и
и 
Сообщим рассматриваемой механической системе любое возможное перемещение, допускаемое наложенными на нее связями, например, такое, при котором кривошип ОА совершит поворот вокруг точки О по ходу часовой стрелки на угол  . При этом звено АВ повернется на угол
. При этом звено АВ повернется на угол  вокруг своего мгновенного центра скоростей Р, а звено ВС − на угол
вокруг своего мгновенного центра скоростей Р, а звено ВС − на угол  вокруг точки
вокруг точки  . Модули возможных перемещений точек В и С приложения сил
. Модули возможных перемещений точек В и С приложения сил  и обзначим
и обзначим  и
и  . Тогда уравнение работ (1) примет следующий вид:
. Тогда уравнение работ (1) примет следующий вид:
 . (2)
. (2)
При составлении уравнения (2) учтено, что возможные работы сил тяжести звеньев механизма равны нулю, поскольку эти силы перпендикулярны возможным перемещениям их точек приложения.
Для определения момента M в уравнении (2) возможные перемещения и необходимо выразить через . Из рис. 59 яс-но, что  ;
; 
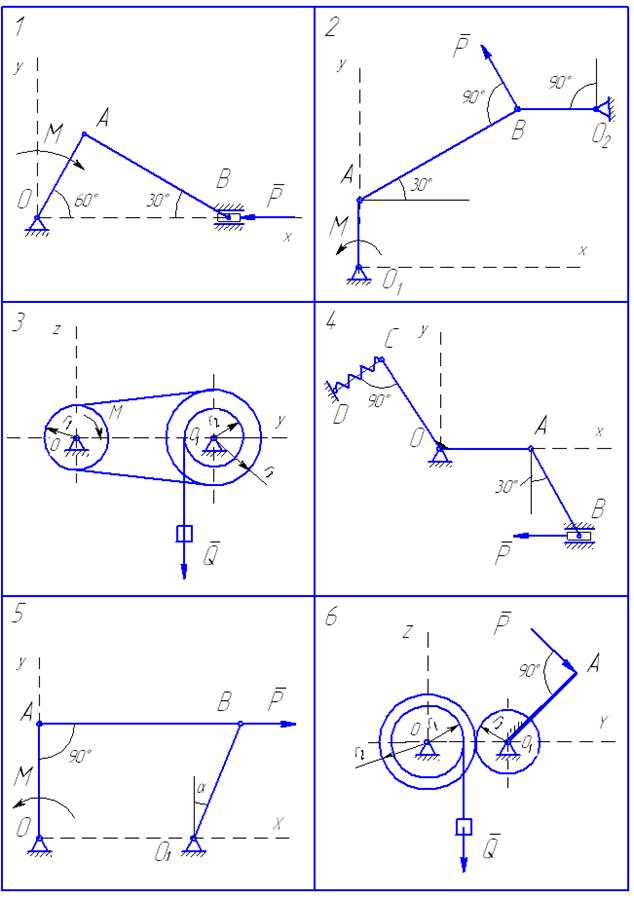 Рис. 54
Рис. 54
 Рис. 55
Рис. 55
 Рис. 56
Рис. 56
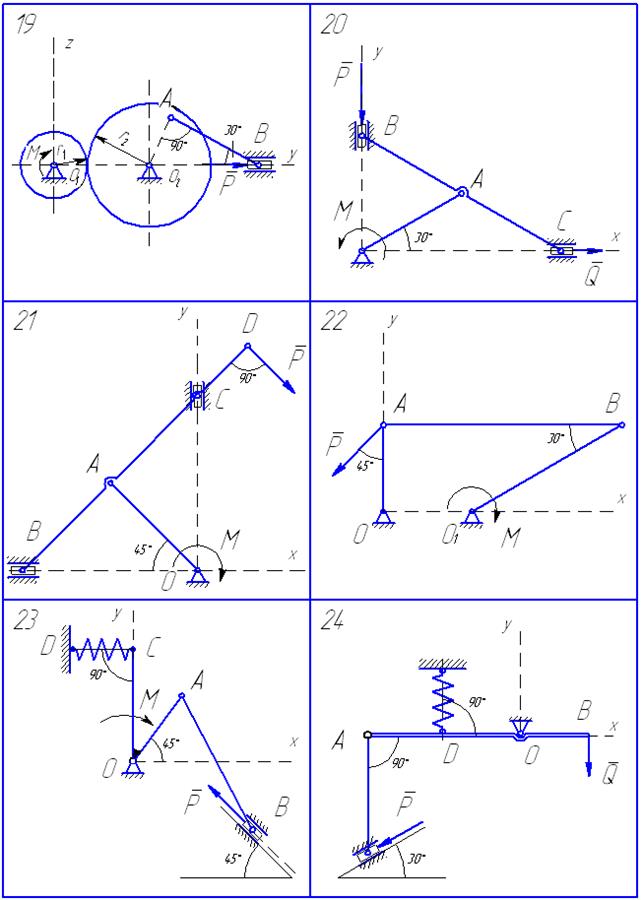 Рис. 57
Рис. 57
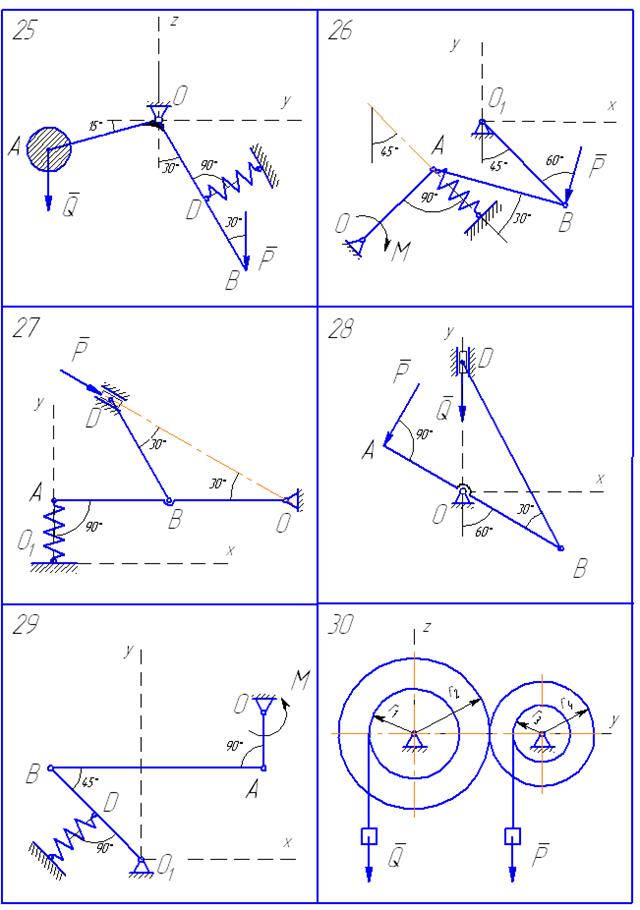
 Рис. 58
Рис. 58
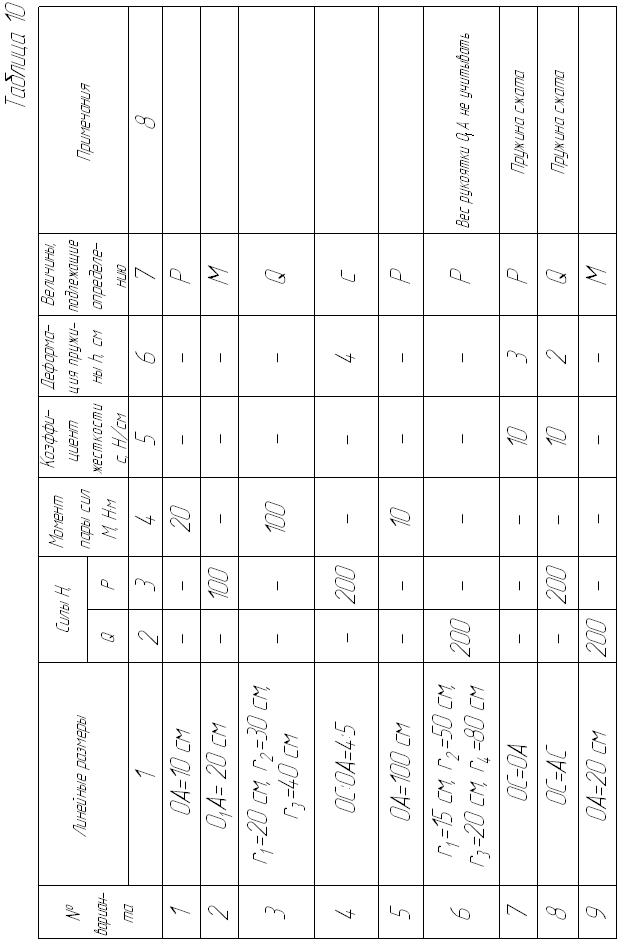
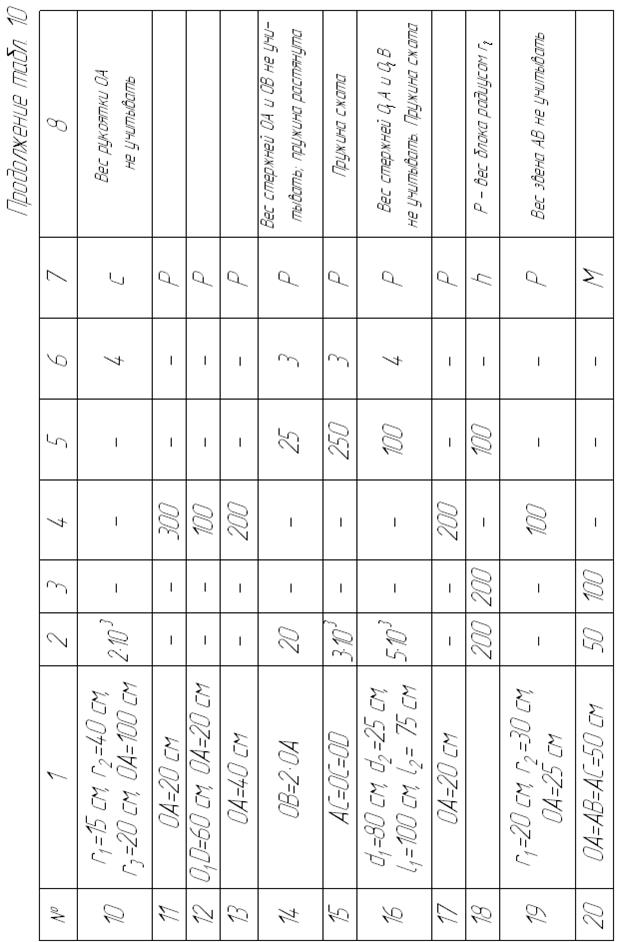

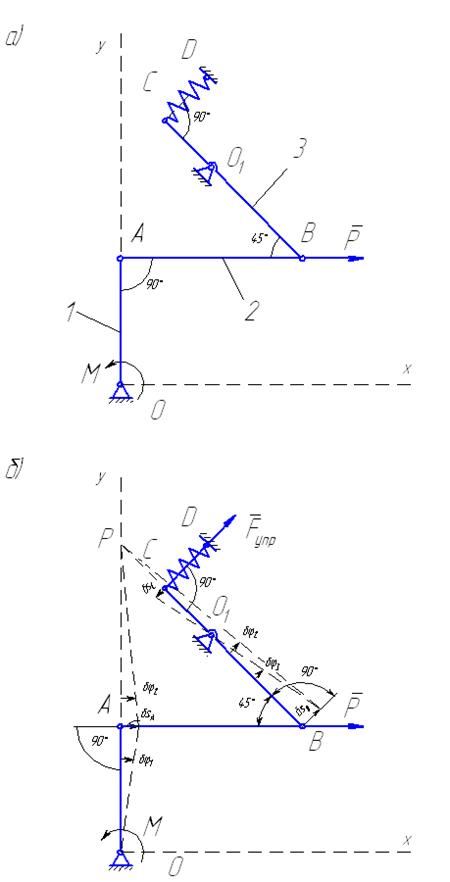
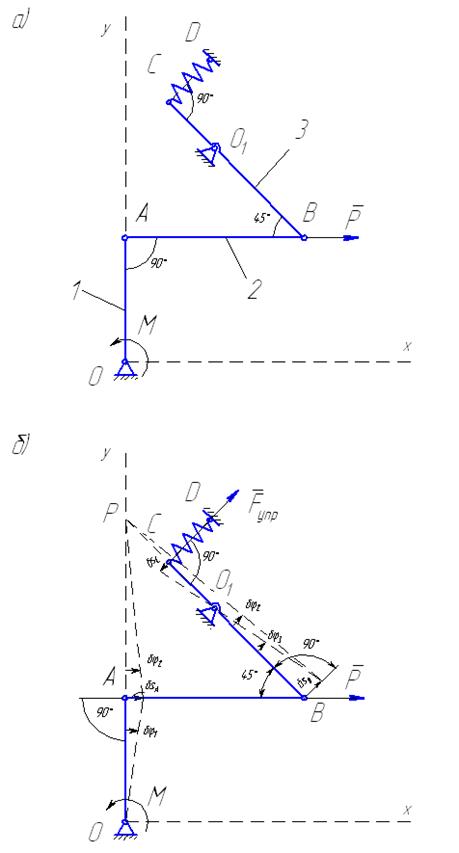
Рис. 59
тогда
 .
.
Так как  , то
, то  .
.
Сила упругости пружины пропорциональна ее деформации:  . Подставив в уравнение работ (2) выражение силы упругости и выражения для возможных перемещений и , получим:
. Подставив в уравнение работ (2) выражение силы упругости и выражения для возможных перемещений и , получим:
 ,
,
откуда

 Н·м.
Н·м.
Ответ:  кН·м.
кН·м.
ПРИНЦИП ДАЛАМБЕРА – ЛАГРАНЖА
И ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Не нашли, что искали? Воспользуйтесь поиском: