ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Перетворювач координат
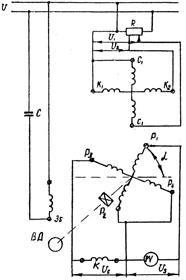
Рис. 17.6. Схема для вирішення прямокутного трикутника
За допомогою поворотних трансформаторів здійснюється перетворення координат на площині (від декартової системи до полярної; від однієї декартової системи до іншої, яка повернута на певний кут α, та низку інших перетворень), визначення гіпотенузи прямокутного трикутника та одного з гострих кутів за двома катетами.
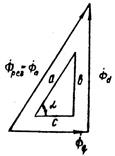
Рис. 17.7. Заданий прямокутний трикутник
Схема для вирішення прямокутного трикутника наведена на рис.17.6. На схемі наведено механічне з’єднання роторів поворотного трансформатора та виконавчого двигуна з амплітудно-фазовим керуванням через редуктор.
Будемо вважати, що задано прямокутний трикутник, який має сторони з довжинами а, b, с (рис.17.7).
Відомі катети b і с. потрібно визначити гіпотенузу а й кут α.
Довжини катетів задаємо за допомогою подільника R (рис.17.6) у вигляді напруг:
 , (17.66)
, (17.66)
 . (17.67)
. (17.67)
МРС головної та компенсаційної обмоток створюють пульсуючий магнітні потоки  та
та  , осі яких нерухомі у просторі. Якщо машина не насичена, то модулі та пропорційні до напруг
, осі яких нерухомі у просторі. Якщо машина не насичена, то модулі та пропорційні до напруг  та
та  . Додаючись, потоки та створюють результуючий магнітний потік
. Додаючись, потоки та створюють результуючий магнітний потік  , вектор якого створює за осями головної й компенсаційної обмоток такі ж кути, як і гіпотенуза а з катетами b та с. Подовжня та поперечна складові результуючого потоку наближено дорівнюють:
, вектор якого створює за осями головної й компенсаційної обмоток такі ж кути, як і гіпотенуза а з катетами b та с. Подовжня та поперечна складові результуючого потоку наближено дорівнюють:
 ; (17.68)
; (17.68)
 . (17.69)
. (17.69)
Результуючий потік дорівнює:
 . (17.70)
. (17.70)
Цей потік наводить в роторних обмотках ЕРС:
 ; (17.71)
; (17.71)
 . (17.72)
. (17.72)
Припустимо, що в початковий момент часу (до вмикання  та
та  ) α=0, тобто осі обмоток Р3-Р4 та С1-С2 співпадають (рис.17.6). При подачі напруг та потік
) α=0, тобто осі обмоток Р3-Р4 та С1-С2 співпадають (рис.17.6). При подачі напруг та потік  наведе в обмотках ротора ЕРС у відповідності з (17.71), (17.72). Виконавчий двигун почне обертатись, і його обертання буде продовжуватись до того моменту часу, доки на затискачах обмотки керування «К» буде напруга, тобто до тих пір, доки обмотка Р3-Р4 не займе положення, при якому її вісь буде перпендикулярною до осі магнітного потоку . Тому ротор повернеться на кут α. При цьому:
наведе в обмотках ротора ЕРС у відповідності з (17.71), (17.72). Виконавчий двигун почне обертатись, і його обертання буде продовжуватись до того моменту часу, доки на затискачах обмотки керування «К» буде напруга, тобто до тих пір, доки обмотка Р3-Р4 не займе положення, при якому її вісь буде перпендикулярною до осі магнітного потоку . Тому ротор повернеться на кут α. При цьому:
 ;
;  .
.
Нехтуючи спадом напруги в обмотці, можливо записати:
 . (17.73)
. (17.73)
Таким чином, гіпотенуза а пропорційна напрузі  при нерухомому роторі, а кут α дорівнює одному з гострих кутів прямокутного трикутника.
при нерухомому роторі, а кут α дорівнює одному з гострих кутів прямокутного трикутника.

Рис. 17.8. Схема вмикання перетворювача координат
За допомогою поворотного трансформатора можливо перетворювати одну систему координат в іншу, повернуту на деякий кут α. Для цього суміщують вихідну систему координат з осями обмоток статора, а перетворену – з осями обмоток ротора (рис.17.8).
При вмиканні обмоток С1-С2 та К1-К2 на синфазні напруги та створюються магнітні потоки за співвідношеннями (17.68), (17.69). У вторинних обмотках кожен з цих потоків наводить відповідну ЕРС:
 ; (17.74)
; (17.74)
 . (17.75)
. (17.75)
Складові ЕРС у (17.74), (17.75) дорівнюють:
 ; (17.76)
; (17.76)
 . (17.77)
. (17.77)
 ; (17.78)
; (17.78)
 . (17.79)
. (17.79)
Підставляючи з (17.76)÷(17.79) у (17.74), (17.75) з урахуванням (17.68), (17.69) одержимо, вважаючи  ;
;  :
:
 ; (17.80)
; (17.80)
 ; (17.81)
; (17.81)
Формули (17.80), (17.81) відповідні співвідношенням між координатами повернутих осей у декартовій системі. Якщо
 , (17.82)
, (17.82)
 . (17.83)
. (17.83)
то
 , (17.84)
, (17.84)
 . (17.85)
. (17.85)
Оскільки за схемою рис.17.6 визначається довжина гіпотенузи прямокутного трикутника й кут α за двома катетами, це відповідно переходу від декартової системи координат (катети) до полярної (гіпотенуза й кут).
В цьому режимі, як і в попередніх, здійснюється симетрування:
а) первинне при z1=zк; zs≠zc;
б) вторинне при zs=zc; z1≠zк;
в) первинне та вторинне при z1=zк; zs=zc;
При первинному симетруванні перетворювача координат та , які співпадають за фазою, повинні бути задані в одних масштабах. При вторинному симетруванні – навпаки. Найзручнішим видом симетрування є сукупне первинне та вторинне.
Не нашли, что искали? Воспользуйтесь поиском: