ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Способы передачи энергии и информации.
Лекция №1
Введение
Доля электроники в автомобилях постоянно увеличивается - в 2000 году на нее приходилось 22% стоимости автомобиля, а к 2010-му ожидается 35%.
Еще более возрастает роль электронных и микропроцессорных систем, которые во многом определяют активную и пассивную безопасность автомобиля. Так 1 июля 2004 года в Европейском союзе вступило в силу коллективное обязательство автопроизводителей не поставлять на рынок автомобили без антиблокировочных систем. Как ожидается, вскоре аналогичное решение будет принято и по подушкам безопасности.
Не меньшее внимание уделяется экологическим показателям автомобиля, выполнить которые без микропроцессорного управления силовым агрегатом невозможно.
Несомненно, вопросы конструкции, эксплуатации электронных систем автомобиля являются актуальными.
Целью данного пособия является обобщение, систематизация вопросов конструкции, диагностирования и обслуживания современных электронных и микропроцессорных систем автомобиля.
1 ОБЩИЕ СВЕДЕНИЯ ОБ ЭЛЕКТРОННЫХ И МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ АВТОМОБИЛЯ
Понятие электронной системы является более общим, нежели понятие микропроцессорной системы. В самом общем смысле под электронной системой понимается система, построенная на радиоэлектронных элементах. Для четкого понимания различия между электронной и микропроцессорной системами введем их понятия, причем для первой в более узком смысле.
Электронная система автомобиля - система (узел) автомобиля, алгоритм функционирования которой определяется принципиальной электрической схемой блока управления или всего узла. При этом технически электронный блок управления (ЭБУ) или весь узел может быть выполнен на дискретных и (или) интегральных радиоэлементах, а изменение алгоритма работы системы или узла невозможно без изменения электрической схемы.
Микропроцессорная система автомобиля - система автомобиля, алгоритм функционирования которой определяется программой процессора электронного блока управления (ЭБУ). Таким образом, в данной системе всегда есть блок управления на основе микропроцессора и для изменения алгоритма работы системы требуется изменить программу микропроцессора.
Современный автомобиль обладает значительным количеством электронных и микропроцессорных систем различного назначения и уровня сложности, что определило разнообразие в элементной базе устройств и технологиях их изготовления
Рассмотрим основные критерии классификации электронных компонентов автомобиля.
- По типу элементов: дискретные и интегральные электронные компоненты.
По типу рабочего сигнала: цифровые и аналоговые компоненты.
Аналоговые интегральные микросхемы чаще всего делятся по назначению: операционные усилители, стабилизаторы напряжения, усилители низкой частоты, компараторы и т. д.
Цифровые интегральные микросхемы имеют, как правило, два критерия классификации:
- по технологии полупроводников: биполярные, на основе полевых транзисторов и гибридные.
- по назначению: логические, триггеры, регистры, шифраторы, мультиплексоры, микросхемы памяти, высокомощные микросхемы.
Отдельным классом цифровых интегральных микросхем стоят микропроцессоры.
Микропроцессор (МП) - это программно управляемое устройство, осуществляющее процесс обработки цифровой информации и управление этим процессом, реализованное в одной или нескольких больших интегральных схемах (БИС).
Виды сигналов
Как уже отмечалось, данные в информационных системах передаются в виде сигналов. В общем случае различают аналоговые (непрерывные) и дискретные (прерывистые) сигналы.
На рис.1.2.1 показан условный вид аналогового сигнала, т.е. сигнала, который присутствует в любой момент времени t и может принимать любое количественное значение А в допустимом диапазоне его изменения.
На рис.1.2.2 показан условный вид дискретного сигнала. Здесь а - сигнал, дискретный по уровню и аналоговый по времени, т.е. сигнал, который присутствует в любой момент времени, но может количественно принимать только строго определенные значения; б – сигнал, аналоговый по величине, но присутствующий только в строго определенные моменты времени.


Если любому определенному количественному значению сигнала ставится в соответствие некоторый численный эквивалент, выраженный в цифровой, как правило, двоичной системе счисления, то этот эквивалент, существующий в виде физического сигнала, называется цифровым сигналом.
Преобразование сигналов из аналоговой формы в цифровую и обратно осуществляется специализированными устройствами, соответственно аналого-цифровыми и цифроаналоговыми преобразователями.
Вид обрабатываемых сигналов определяет схемотехнику устройств и систем, которые подразделяются на цифровые и аналоговые. В первом случае необходимо учитывать тип линии связи, скорость передачи данных, разрядность сообщений, расстояние между абонентами и др. При обработке аналоговых сигналов следует учитывать их минимальное и максимальное значение, скорость изменения, уровень помех и пр.
Способы передачи энергии и информации.
Система энергоснабжения автомобиля обеспечивает напряжение 12 В.. Стабильность величины напряжения обеспечивается электронным регулятором напряжения.
Для получения электрической энергии иного уровня напряжения или более высокого уровня стабильности применяют электронные стабилизаторы, преобразователи напряжения. Для получения более низких напряжений применяются интегральные стабилизаторы с емкостными фильтрами. Для повышения напряжения возможно применение импульсных преобразователей, в том числе и интегральных.
Основным критерием деления систем проводки является метод управления потребителем электрической энергии. Традиционная система проводки, в которой передача энергии и управление потребителем осуществляется по одному силовому проводу, обычно плюсовому. Однопроводной проводку называют, когда общим проводом является кузов автомобиля. Однако кузов автомобиля, как проводник обладает невысокими характеристиками, в силу неоднородности конструкции, поэтому достаточно часто наиболее важные потребители обладают дополнительным отрицательным проводом, то есть двухпроводной системой проводки.
При распределении энергии применяются два типа электрической проводки:
- одно- и двухпроводная система;
- мультиплексная проводка (с применением информационной шины).
Главными недостатками традиционной системы является металлоемкость, значительная длина и большое количество коммутаторов, за счет увеличения количества независимых цепей управления потребителями. Так, если в 1960 г. электросеть легкового автомобиля составляла - 200 м, то в настоящее время она увеличилась на порядок, а ее общая масса достигла 50 кг. Кроме того, она содержит около 2000 контактных разъемов, разветвлений, предохранителей и т. п. Считается, что их число каждые 10 лет удваивается [25]. Что порождает множество проблем, связанных со стоимостью, габаритными размерами, массой, гибкостью, проектированием, производством, монтажом, надежностью и поиском неисправностей в бортовых системах электрооборудования. Поэтому многие специалисты считают, что нужны совершенно новые принципы организации этих систем.
Для решения задачи эффективного управления большим количеством потребителей возможно применение двух технологий:
- двухпроводная система с частотной модуляцией, цифровым сигналом управления по силовому проводу;
- применение информационной шины - мультиплексной проводки.
В первой технологии по силовому проводу передается цифровой закодированный сигнал, который воспринимает дешифратор потребителя, и в случае идентификации управляющей команды включается потребитель через электронный коммутатор.Система не требует дополнительных шин управления, однако увеличивает количество помех в бортовой сети автомобиля, а при большом количестве потребителей усложняет шифраторы сигнала и снижает помехоустойчивость системы управления. Таким образом, подобная технология эффективна при небольшом количестве потребителей, что определило их применение в охранных автомобильных комплексах.
Появление в автомобиле нескольких микропроцессорных систем и увеличение их роли в безопасности автомобиля потребовало внедрения новой технологии управления потребителями этих систем - мультиплексной проводки, то есть на основе информационной шины (электронно-вычислительной сети) на автомобиле. В такой проводке управление осуществляется по отдельной информационной шине, которая соединяет все микропроцессоры автомобиля. Управляющий сигнал имеет цифровой вид, и после дешифрования электронный коммутатор включает или выключает потребитель.
Мультиплексные системы значительно отличаются от обычных систем. Укажем на некоторые отличия, очевидные из рисунка 1.3 [19]
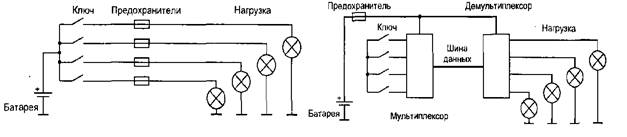 Рисунок 1.3 - Обычное и мультиплексное подключение нагрузок [19]
Рисунок 1.3 - Обычное и мультиплексное подключение нагрузок [19]
В некоторых случаях электронная схема узла должна постоянно считывать состояние управляющего ключа, даже когда большая часть электрооборудования обесточена. Например, положение ключа центрального замка дверей должно определяться и при парковке, когда многие системы выключены из соображений энергосбережения.
По схеме на рисунке 1.3 может быть реализовано электропитание корпусных потребителей: освещение, стеклоподъемники, омыватели и т. д. Электропроводка упрощается за счет приема и передачи различных сигналов между узлами по одной и той же шине (проводу). При обычной схеме проводки для реализации каждой функции требуется отдельный проводник.

Через узлы осуществляется доступ к сети. Узел, как правило, содержит микропроцессор, подключенный к коммутационной шине, и электронные цепи, управляющие работой датчиков и исполнительных механизмов, подключенных к узлу. Коммуникационная шина на современном автомобиле чаще всего представляет собой витую пару проводов, хотя возможны и другие варианты. На рисунке 1.4 в общем виде показана мультиплексная система.
К входам узлов могут подключаться любые датчики, к выходам исполнительные устройства. Примеры входной информации: температура, сила тока, напряжение, положение переключателей и т. д. Примеры исполнительных устройств и механизмов: дисплеи, электроклапаны, электродвигатели и т. п.
SAE (Society of Automotive Engineers - международное общество автомобильных инженеров) делит мультиплексные автомобильные системы на три класса [19]:
- класс А. Мультиплексные системы, в которых автомобильная электропроводка упрощается за счет использования коммуникационной шины. По этой шине между узлами передаются сигналы, которые проходят по раздельным проводам в автомобиле с обычной электропроводкой. Узлы, являющиеся частью мультиплексной системы, при обычной электропроводке отсутствуют.
- класс В. В мультиплексной системе между узлами передаются информационные данные (обычно значения параметров), чем достигается устранение избыточности датчиков и иных элементов по сравнению с обычной схемой электропроводки. В этом случае узлы существуют и в обычной системе, в виде несвязанных элементов.
- - класс С. Мультиплексная система с высокой скоростью обмена данными, осуществляющая управление в реальном времени, например, двигателем, антиблокировочной системой и т. д.
Системы класса А используются для включения/выключения различных нагрузок (например, для управления элементами двери салона ), скорость передачи но шине не более 10 Кбит/сек.
Современные автомобили используют CAN (Controller Area Network) и LIN (Local Interconnect Network) шины. Последние связывают так называемый мастер-блок с исполнителем, который управляет группой устройств или механизмов [27].
Таким образом, наличие в автомобиле более трех микропроцессорных систем требует мультиплексной проводки.
И один из предлагаемых путей - мультиплексирование, при котором теоретически один единственный канал (шина) способен заменить несколько десятков проводов. В мультиплексной системе все потребители электроэнергии с одной стороны подсоединены к линии электропитания, которая начинается от аккумуляторной батареи, а с другой - к информационной линии, соединяющей их с управляющим устройством. Находящиеся в непосредственной близости от потребителя программируемые электронные компоненты отфильтровывают предназначенные для них данные из информационной линии и подключают (или отключают) его к (от) источнику питания. То есть в данном случае для реализации каждой отдельной функции органа управления (стеклоподъемник, система замков дверей с центральным управлением, противоугонное сигнальное устройство и т. п.) в исполнительном элементе собственная линия не нужна.
Для того, чтобы исполнительные блоки, т. е. потребители и блок управления, могли обмениваться информацией между собой, необходимо выполнить несколько условий. В частности, нужно, чтобы: канал передачи информации обеспечивал высокую скорость передачи данных; информация передавалась посредством физических величин (напряжение, сила тока, освещенность и т. д.); передача данных была регулируемой (кодирование, скорость передачи, аналого-цифровое преобразование, разбивка и т. д.), т. е. выполнялась по так называемому протоколу.
Комплексный подход к мультиплексированию привел разработчиков к использованию шины с распределенной обработкой сигналов и схемой обнаружения конфликтных ситуаций, позволяя добавлять новые и новые модули, не перегружая систему в целом.
Шина CAN - это двухпроводная, последовательная, асинхронная шина с равноправными узлами и подавлением синфазных помех, с хорошим соотношением цена / производительность. CAN характеризуется высокой скоростью передачи, высокой помехоустойчивостью и способностью обнаруживать любые возникающие ошибки. CAN является идеальным решением для любого приложения, где микроконтроллеры обмениваются сообщениями друг с другом и с удаленными периферийными устройствами. При этом мощные жгуты электрических проводов заменяются двухпроводной CAN-сетью. CAN активно используется в автомобиле для управления двигателем, коробкой передач, дверьми, зеркалами, стеклоподъемниками, рисунок 2.4.
Преимущества CAN-шины перед классической схемой электрооборудования очевидны. Например, удешевление сборки на конвейере. Кроме того, CAN-шина облегчает диагностику и ремонт вышедших из строя компонентов. Универсальная проводка подойдет и для разных комплектаций одного автомобиля - дополнительные устройства просто подключаются к нужным разъемам.
Цифровая передача данных значительно надежнее обычной аналоговой - шина лучше защищена от помех, контакты надежнее изолированы от внешних воздействий. Под новые стандарты подстраиваются и сторонние производители дополнительного оборудования.

CAN-шина относится к типу последовательных шин. Данные передаются бит за битом, из них складываются так называемые кадры - основные информационные единицы. Для последовательной передачи нужно минимальное количество проводников. Чаще всего используют двухпроводную витую пару или однопроводное соединение, где функцию второго проводника, как в обычной автомобильной электрической схеме, выполняет кузов («масса»). Проводником могут служить также радиоканал, инфракрасное излучение или оптоволокно
CAN - мультимастерная шина, то есть без центрального управляющего устройства. Все подключаемые электронные блоки (или контроллеры) равноправны - любой имеет доступ к передаваемым данным и может сам передавать. Контроллеры отслеживают информацию по принципу «слушаю всех», то есть каждый читает все проходящие по шине кадры, но принимает лишь адресованные ему данные. Например, блок управления климатической установкой пропустит ненужные сигналы от датчика уровня топлива или ABS, а считает только необходимые сведения о температуре забортного воздуха, охлаждающей жидкости, оборотах двигателя.
Другой принцип общения на шине позаимствован из компьютерных сетей и называется «один говорит - остальные слушают». Единовременно передавать данные может только один контроллер. Если вмешивается еще кто-то, конфликт разрешает служба арбитража. Работает она по такому алгоритму. Каждый из контроллеров сравнивает бит, передаваемый на шину, с битом другого блока управления. Если значения этих битов равны, то оба контроллера переходят к сличению следующей пары. И так до тех пор, пока биты не будут отличаться. Приоритет получает тот контроллер, который пытался передать логический ноль - другой блок управления ждет, пока шина не освободится.
В автомобиле несколько основных шин: обычно одна опоясывает двигатель, коробку передач, системы безопасности. По другой идут команды на электростеклоподъемники, сиденья, климатическую установку, третья обслуживает панель приборов. Незначительный сбой на одном участке длинной цепи может привести к выходу из строя всей электроники.
Шины отличаются скоростью передачи данных. Основная, отвечающая за безопасность пассажиров, пропускает за единицу времени в пять раз больше информации, чем другие, обеспечивающие комфорт водителя и пассажиров.
4. Обзор шинных систем
4.1. К - провод (Однополосная шина данных)
K-линия или K-шина является предшественником всех шинных систем, применяемых в европейских автомобилях. K-линия используется для диагностики и официально стандартизирована еще в 1989 году. К ее преимуществам относятся простое исполнение и возможность подключения к компьютеру. В большинстве случаев K-линия состоит только из одного электропровода. Напряжение сигнала является рабочим напряжением транспортного средства по отношению к его массе. Максимальная длина K-линии не специфицирована.
K-линия предназначена исключительно для выполнения диагностических функций в двунаправленных соединениях с двумя участниками. На современных грузовых автомобилях модифицированная K-линия применяется для соединения нескольких БУ. Скорость передачи данных такой шины составляет от 1.2 до 10.4 Кбит/сек. Так как K-линия используется только в диагностических целях, надежность передачи данных здесь не так важна. Благодаря простым и давно стандартизированным техническим параметрам затраты остаются минимальными. K-линия работает по асинхронной схеме передачи данных с управлением доступом в режиме “задающий / ведомый“. Так как шина, не рассчитана на большие скорости передачи данных, прием одного сообщения при определенных обстоятельствах может длиться до 5 секунд. В 1989 году К-провод стандартизован как ISO 9141
4.2. Технология CAN
Сокращение ”CAN” означает Controller Area Network. Технология CAN была разработана фирмой Bosch во второй половине 80-х годов для надежной передачи данных измерений, управления и контроля. В 1991 г. система CAN впервые применена в качестве шины передачи данных класса C в транспортных средствах и с того времени хорошо себя зарекомендовала. Стандарт CAN описан в норме ISO 11898.
В системе CAN используется витая двухпроводная линия. Уровень сигнала представляет собой разность напряжений между проводами. Благодаря этому CAN не так сильно подвержена помехам и не создает помехи для других БУ. При низких скоростях передачи в случае разрыва одного провода шина может функционировать даже с одним проводом.
Длина проводки зависит от скорости передачи данных. При этом главную роль играет время распространения сигнала. При 1 Мбит/сек длина CAN-шины может достигать 40 метров, а при 10 Кбит/сек длина теоретически может достигать более 1 км.
Так как управление доступом происходит на уровне сообщения, количество БУ, в принципе, не ограничено. В практике все же существуют ограничения в соответствии с исполнением приемопередатчиков.
Как и в случае с напряжением сигнала, скорости передачи данных в системе CAN не предписаны. В электронных системах автомобилей ”Мерседес-Бенц” используются шины CAN с низкой и высокой скоростью (Lowspeed-/Highspeed-CAN). Скорость передачи данных Lowspeed составляет до 125 Кбит/сек, Highspeed-CAN - более 125 Кбит/с. Применяются различные механизмы предотвращения, распознавания и корректирования ошибок. С их помощью БУ могут предупреждать об ошибочных сообщениях или отключаться при установлении ошибки во время передачи данных. Поэтому технология CAN считается самой надежной технологией.
Благодаря простым и давно стандартизированным техническим параметрам затраты на производство и эксплуатацию этих шин являются минимальными. Поэтому в настоящее время CAN применяется даже в качестве диагностических шин. Технология CAN функционирует синхронно. Управление доступом осуществляется при помощи арбитража на уровне сообщений. Каждое возможное сообщение в системе имеет однозначный код опознавания, первый бит которого получает приоритетный статус. Если два устройства передают данные одновременно, первоочередность передачи автоматически переходит к приоритетному сообщению. Для обязательного определения кода опознавания каждого сообщения резервируются 29 битов. Следовательно, короткие сообщения содержат больше управляющих данных, чем данных для пользования.
4.3. Технология LIN
Технология LIN (Local Interconnent Network) разработана совместными усилиями различных производителей автомобилей в конце 90-х годов в качестве более дешевой альтернативы к технологии Low-Speed-CAN. Технология LIN применяется везде, где не требуется ширина полосы пропускания и универсальность технологии CAN.
Физически LIN структурирована как K-провод. На одном проводе уровень сигнала определяется при рабочем напряжении транспортного средства по отношению к его массе. Длина линии ограничена до 40 м. Этого достаточно для использования шины LIN внутри одного локального узла автомобиля. В отличие от K-
провода технология LIN допускает соединения до 16 БУ. Скорость передачи данных в такой шине составляет от 1 Кбит/сек до 20 Кбит/сек. В шинах LIN автомобилей ”Мерседес-Бенц” скорость передачи данных от 9,6 до 20 Кбит/сек.
Технология LIN предназначена для использования в некритических с точки зрения безопасности системах. Для LIN существует несколько механизмов для распознавания и корректировки ошибок. Затраты на производство и эксплуатацию незначительны, что собственно и являлось целью разработки. Протокол LIN также похож на протокол K-линии.
4.4. Технология MOST
Шины MOST (Media Oriented Systems Transport) используются в настоящее время на автомобилях для передачи данных между такими системами как радиоприемник, CD-плеер, телефон, навигационные системы и бортовое телевидение. Такие шины позволяют передавать большой объем информации. Технология MOST впервые разработана компанией Oasis Silicon Systems, позже – основанной в 1998 году организацией MOST-Cooperation, которая стандартизировала ее в сфере создания мультимедийных сетевых структур в транспортных средствах.
В технологии MOST используются световоды. Они допускают экстремально высокие скорости передачи данных при абсолютной невосприимчивости к электромагнитным помехам. Длина линии не специфицирована. Максимально возможно подключить до 64 различных мультимедийных компонентов, которые соединены, как правило, в виде кольца. Скорость передачи данных равна 25 Мбит/сек и считается очень высокой. Надежность передачи данных в шинах MOST не является основной, так как эта технология разработана для некритических с точки зрения безопасности систем. Однако кольцевая структура, в которой соединены световоды, влечет за собой опасность рассоединения цепи в случае выхода из строя одного из компонентов.
Технология MOST является относительно дорогой технологией. Но ввиду применения главным образом в системах обеспечения комфорта автомобилей представительского класса, затраты оправдывают себя.
4.5. Технология Bluetooth
Bluetooth, разработанная фирмой Ericsson, объединяет радио технологии и технологии электронных сетей. При помощи Bluetooth возможно создавать небольшую бескабельную сетевую структуру.
В качестве среды-носителя используются радиоволны в нелицензированом диапазоне частот 2.4 гГц. Этот диапазон используется также в бескабельных телефонах и микроволновых печах. По этой причине технология Bluetooth очень чувствительна к помехам. В зависимости от мощности сигнала, максимальное расстояние между устройствами может составлять от 1-10, до более 100 метров.
Технология Bluetooth позволяет создавать сетевые структуры, в которые могут объединяться до 260 устройств, но активными могут оставаться одновременно не более 8. Другие устройства поддерживают синхронизацию и могут быть активированны по запросу.
Скорость передачи данных очень высока и составляет более 700 Кбит/сек. Но такая скорость достигается только при идеальных условиях. Часто подключенные устройства создают помехи друг другу и скорость передачи по Bluetooth сильно уменьшается.
По причине чувствительности к помехам технологию Bluetooth нельзя рассматривать как высоконадежную технологию. Однако различные устройства легко подключаются к этой системе передачи данных.
Для технологии Bluetooth используются готовые микрокристаллические модули, позволяющие простое применение. Однако технология Bluetooth остается относительно дорогой по сравнению с обычными технологиями подключения в сетевые структуры.
6. Шина передачи данных CAN-Datenbus
6.1. Сетевая конфигурация САN- Datenbus
С 1980 года цифровая электроника начала свое бурное развитие. На транспортных средствах все больше стали применяться электронные БУ. Для организации коммуникации между различными БУ фирма Bosch разработала CAN-шину (CAN-Datenbus), где CAN расшифровывается как Controller Area Network. Это значит, что блоки управления связаны между собой в единую сеть (рис. 6.1) и между ними происходит обмен данными по специальной шине.
Элементы привода автомобиля составляют единую систему, куда входят: блок 1 управления двигателем; блок 2 управления АКП; блок 3 управления системами ходовой части.

При этом возможны варианты соединения БУ между собой в единую сеть (рис. 6.2). Так, узловой пункт находится, как правило, за пределами БУ, в жгуте проводов (рис. 6.2, а)
В исключительных случаях узловой пункт может находиться внутри БУ двигателем рис. 6.2, б. Комфортные элементы также составляют единую систему, включающую в себя центральный блок 4 (рис. 6.1) управления и блоки 5 управления в дверях. При обмене информацией с помощью CAN-шины все данные передаются по двум двунаправленным проводам (проводящим сообщения в обе стороны), независимо от количества данных и БУ. В этом случае передача данных происходит аналогично телефонной «конференц-связи», где один участник (блок управления) «говорит» свои данные в проводящую сеть, в то время как остальные участники «слушают» эти данные. Одни участники находят эти данные интересными для себя и будут их использовать, другие - нет. Чем больше информации о состоянии всей системы содержится в БУ, тем лучше он может согласовывать отдельные функции системы.
Таким образом, шина передачи данных имеет следующие преимущества:
• если протокол данных предполагается расширить за счет дополнительной информации, то не требуется вносить изменения в программное обеспечение;
• низкая квота ошибок в результате постоянной перепроверки информации, передаваемой через БУ;
• меньшее количество датчиков и проводов благодаря возможности многократного использования одного сигнала;
• между БУ возможна очень быстрая передача данных;
• экономия места за счет уменьшения размеров БУ и разъемов для подключения БУ;
• CAN-шина принята к использованию во всем мире, поэтому через нее может происходить обмен данными между БУ, изготовленными различными производителями.
Коммуникацию между БУ обеспечивают так называемые приемопередатчики, соединяющие их с шиной. Они интегрированы в БУ, но представляют собой самостоятельные компоненты, посылающие и принимающие данные.
CAN-шина состоит из следующих компонентов (рис. 6.3): по одному контроллеру и трансиверу в БУ, двух сопротивлений и двух проводов передачи данных. За исключением проводов все компоненты располагаются в БУ. Несмотря на это в работе БУ не произошло никаких изменений. Указанные компоненты шины выполняют следующие функции: Контроллер – с одной стороны получает от БУ данные, которые должны быть переданы, обрабатывает их и передает дальше на трансивер.
С другой стороны он получает данные от трансивера и после соответствующей обработки передает их в БУ. Трансивер (Transceiver) – является одновременно передатчиком (Transmitter) и приемником (Receiver). Поступающие от контроллера данные он преобразует в электрические сигналы и посылает их по проводам передачи данных. При этом он также принимает данные и преобразует их для контроллера. Данные в системе привода, чтобы их можно было использовать с максимальной эффективностью, должны передаваться очень быстро. Для этого требуется трансивер c высокой мощностью. Такой трансивер делает возможным передачу данных в промежутке между двумя вспышками в системе зажигания.
Тем самым воспринятые данные могут быть использованы уже для следующего управляющего импульса. Сопротивление – препятствует возникновению эффекта резонанса при передаче данных. Провода передачи данных – являются двунаправленными и служат для передачи данных, обозначаются как CAN-High и CAN-Low.
Передача информации с применением CAN-шины происходит следующим образом (рис. 6.3). Один из БУ (блок 2) подготавливает информацию и передает ее на провода передачи данных. При этом «приемник» переданной информации не указывается, и она принимается и оценивается всеми блоками управления (блоки 1, 3, 4). 6.2. Протокол данных
CAN-шина передает протокол данных, состоящий из множества упорядоченных битов, между блоками управления.
Бит – это наименьшая единица информации, т.е. одно включение в единицу времени. В электронике эта информация может иметь значение “0” или “1”, соответственно “да” или “нет”.
Протокол данных (рис. 6.4) содержит семь областей (полей). Число битов одного протокола зависит от величины поля данных 5.
Структура протокола идентична для обоих проводов передачи данных CAN-шины. Рассмотрим назначение каждого из полей протокола данных.
Начальное поле 1 – отмечает начало протокола данных. По проводу CAN-High посылается один бит информации, при этом величина сигнала порядка 5 В (определяется системой). По проводу CAN-Low посылается один бит информации, величина сигнала которого 0 В.
В поле определения статуса 2 устанавливается приоритет протокола данных. Если, к примеру, два БУ одновременно хотят отправить свой протокол данных, преимущество имеет протокол с более высоким приоритетом (см. п. 6.3).
В контрольном поле 4 обозначено число информационных сообщений, находящихся в поле данных. Таким образом, каждый приемник может перепроверить, все ли информационные сообщения он принял.
В поле данных 5 собственно и происходит передача (трансляция) информационных сообщений для других БУ. Из приведенной табл. 6.1 можно увидеть, как с каждым дополнительным битом удваивается объем передаваемой информации, на примере температуры охлаждающей жидкости автомобильного двигателя (значению “0” соответствует сигнал 0 В, а “1” – 5 В).
Если сразу несколько БУ хотят отправить свои протоколы данных, необходимо решить, чей протокол будет отправлен первым. Протокол данных с максимальным приоритетом будет отправлен в первую очередь. Так, например, протокол данных от БУ тормозной системы с информацией, касающейся безопасности, оценивается как более важный, чем протокол от БУ АКП, содержащий информацию о комфорте движения.
Распределение информации происходит следующим образом: каждому протоколу данных в соответствии с его приоритетом в поле определения статуса 2 (рис. 6.4) соответствует код, состоящий из 11 битов. Каждый бит имеет значение, которому соответствует определенная «значимость». Она может быть либо повышенной, либо пониженной.
Все три БУ одновременно начинают передавать свои протоколы данных. Одновременно начинается их сравнение бит за битом в проводе передачи данных CAN-шины. Если один БУ посылает бит с пониженной значимостью “1” и распознает другой бит с повышенной значимостью “0”, он прекращает передачу и становится приемником. Так, видно из табл. 6.4, наибольшим приоритетом обладает информация, поступающая от тормозной системы (в начале поля идет сигнал “00”), затем от двигателя (“01”) и только затем от коробки передач (“10”).
| <== предыдущая лекция | | | следующая лекция ==> |
| Товар с новыми свойствами, производство и сбыт которого добавляются к существующему ассортименту, обычно называют новым продуктом. | | | Элементы геометрической оптики. |
Не нашли, что искали? Воспользуйтесь поиском: