ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Принципы управления ЭД
ГЛАВА 3. ПРИНЦИПЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭП
Классификация схем ЭП
Согласно ГОСТу различают схемы:
1) функциональные – упрощенная электрическая схема с раскрытием отдельных функций электрических элементов;
2) структурные – структура и основные элементы без раскрытия их содержания;
3) принципиальные – раскрываются все элементы и связи между ними;
4) монтажные – разводка проводов, кабеля. Составляется на основе принципиальной схемы;
5) внешних соединений (подключения);
6) расположения электрооборудования на объекте.
Принципы управления ЭД
 Электродвигателями можно управлять:
Электродвигателями можно управлять:
1) функцией времени f(t)
2) функцией скорости f( )
)
3) функцией тока f(I)
4) функцией положения f( )
) 
1. Типовые узлы управления двигателем функцией времени f(t)
 Изображение электрических элементов и аппаратуры
Изображение электрических элементов и аппаратуры
- катушка аппарата реле или контактора;
- замыкающий контакт аппарата;
- размыкающий контакт аппарата;
- замыкающий контакт с выдержкой времени при замыкании;
- замыкающий контакт с выдержкой времени при размыкании;
-  размыкающий контакт с выдержкой времени при замыкании;
размыкающий контакт с выдержкой времени при замыкании;
- размыкающий контакт с выдержкой времени при размыкании;
- кнопки "пуск-стоп";
- трехфазный силовой контакт;
- трехфазный силовой контакт с дугогасящей камерой;
- контакт команды-контроллера, в 0 положении – замкнут.
Порядок чтения электрических схем
1) Определяется тип ЭД;
2) Способ управления схемой;
3) Исходное состояние аппаратуры (до нажатия кнопки "пуск");
4) Порядок срабатывания аппаратуры после нажатия кнопки "пуск";
5) Определяется конечное состояние аппаратуры.
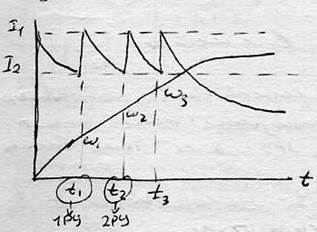
1. Схема управления функцией времени

Л – линейный контактор;
1У, 2У – ускоряющие контакторы;
1РУ, 2РУ – электромагнитные реле времени;
ОВ – обмотка возбуждения двигателя;
РОП – реле обрыва поля.
Достоинства: 1) надежность управления; 2) унификация аппаратуры.
Недостатки: 1) повышенные токи двигателя при пуске с большими моментами инерции и сопротивления.
2. Схема управления функцией скорости
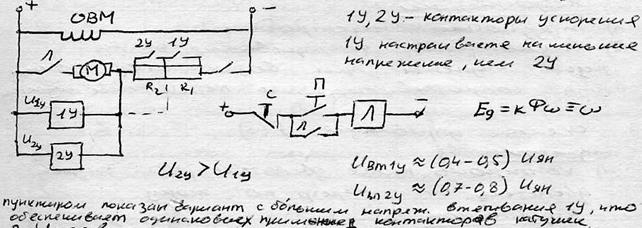


Пунктиром показан вариант с большим напряжением втягивания 1У, что обеспечивает применение одинаковых катушек контакторов.
Достоинства: 1) простота схемы.
Недостатки: 1) трудности настройки; 2) возможность застревания двигателя на пусковой ступени при возрастании момента сопротивления и перегорание ступени.
3. Управление функцией тока
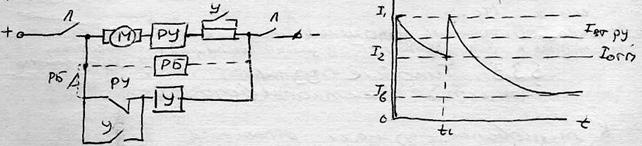
В данной цепи РУ более быстродействующий, чем контакт У.
РБ – реле блокировки – обеспечивает выдержку.
Достоинства: 1) контроль тока двигателя, что защищает от перегрузок по току;
Недостатки: 1) возможность застревания двигателя при больших моментах сопротивления.
4. Управление СЭП функцией положения. Осуществляется с помощью путевых и конечных выключателей. В замкнутых системах это сельсины, индуктосины, СКВТ и т.д.
Типовые датчики
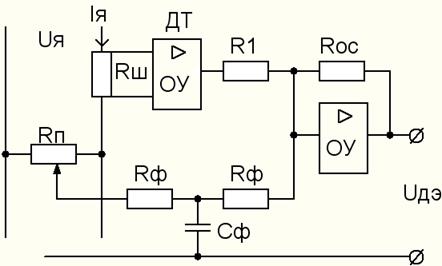
Рассмотрим датчики отечественной универсальной системы блочных регуляторов аналогового исполнения (УБСР-АИ).
1) Датчик тока ДТ1-АИ Применение операционного усилителя (ОУ) позволяет развязать силовую и управляющую цепи привода, что также необходимо по технике безопасности. Коэффициент усиления  подбирается так, чтобы максимальному измеряемому току
подбирается так, чтобы максимальному измеряемому току  соответствовало
соответствовало  .
.

2) Датчик напряжения ДН1-АИ. Коэффициент усиления  подбирается так, чтобы максимальному измеряемому напряжению
подбирается так, чтобы максимальному измеряемому напряжению  соответствовало .
соответствовало .

3) Датчик ЭДС
3) Датчики скорости. В качестве датчиков скорости используются прецизионные тахогенераторы постоянного и переменного тока  .
.
4) Датчики положения
а) Резольвер (англ. resolver). Работает по принципу синусно-косинусного вращающегося трансформатора (СКВТ). У вращающегося трансформатора ротор состоит из катушки (обмотки), которая вместе с обмоткой статора образует трансформатор. Принципиально резольвер устроен точно так же с той лишь разницей, что статор выполнен не из одной, а из двух расположенных под углом 90° друг к другу обмоток. Резольвер служит для определения абсолютного положения вала двигателя внутри одного оборота. Кроме того, по сигналу резольвера определяется значение скорости и моделируется инкрементный датчик для регулирования положения. Ротор резольвера закреплен на валу двигателя. Для того чтобы можно было передавать переменное несущее напряжение на ротор без щеток, на статоре и роторе размещены дополнительные обмотки. По двум выходным синусоидальным напряжениям  и
и  , сдвинутым на 90° (рис. 7), можно определить угол поворота ротора, скорость и инкрементный сигнал по положению (моделирование инкрементного датчика).
, сдвинутым на 90° (рис. 7), можно определить угол поворота ротора, скорость и инкрементный сигнал по положению (моделирование инкрементного датчика).

б) Фотоэлектрические датчики серии ПДФ. Отсутствие температурного и временного дрейфа. 500-5000 имп/об.

5) Датчики рассогласования. Применяются в следящих системах.
а) Потенциометрические датчики рассогласования
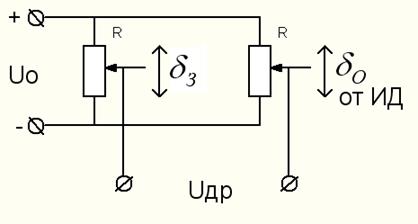
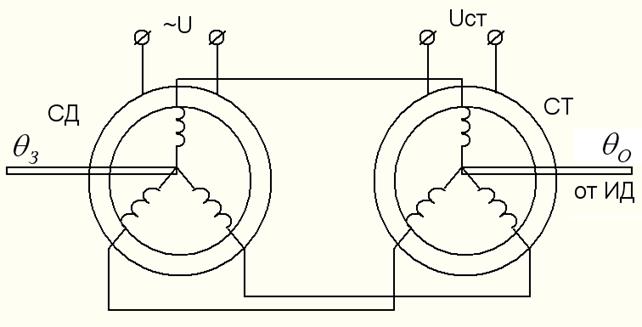
б) Сельсины в трансформаторном режиме. Сельсин имеет 2-фазную обмотку статора и 3-фазную обмотку ротора. Ось сельсина-датчика приводится в движение от задающего устройства, а ось сельсина-приемника – от исполнительного. При разности углов  (т.е. ошибке слежения) на статорной обмотке генерируется напряжение
(т.е. ошибке слежения) на статорной обмотке генерируется напряжение  . Сельсины работают с углами ошибки до 90 градусов, дальше происходит "опрокидывание" сигнала (см.рис.). Существуют также индуктосины – линейные аналоги сельсинов.
. Сельсины работают с углами ошибки до 90 градусов, дальше происходит "опрокидывание" сигнала (см.рис.). Существуют также индуктосины – линейные аналоги сельсинов.

Не нашли, что искали? Воспользуйтесь поиском: