ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Закон полноты частей системы
Закон полноты частей системы описывает минимально необходимый набор частей, обеспечивающий минимальную работоспособность системы. В общем случае, необходимо наличие следующих частей системы:
§ рабочий орган,
§ энергия для обеспечения его работы,
§ система управления рабочим органом.
В идеальном случае рабочий орган – энергия. Например, инструмент для плазменной обработки. Этот частный случай представляет собой одну из тенденций развития техники.
Минимальный набор элементов в средствах транспорта, например, это:
§ движитель – рабочий орган,
§ двигатель с источником энергии,
§ корпус,
Система управления.
В качестве примера рассмотрим некоторые виды указанных частей судна.
Движитель
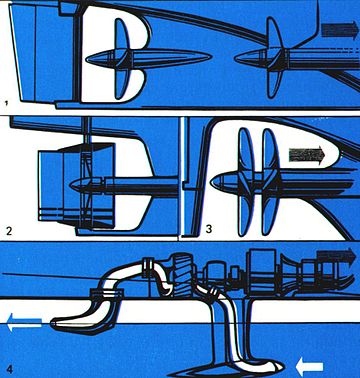

Рис. 34. Движители для передачи большой мощности или для быстрых судов. 1 - трехвальная установка; 2 - гребной винт в насадке; 3 - соосные гребные винты противоположного вращения: 4 - водометный движитель
Движитель для судов могут быть следующих видов: весло, гребное колесо и гребной винт, водомет, реактивная струя, парус, крыло, воздушный змей, парашют, пропеллер, вращающиеся роторы. Основные движители показаны на рис. 33[131] и рис. 34[132].
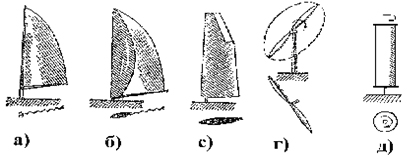
Рис. 33. Судовые ветродвижители Где: а - мягкие паруса, б - полужесткие паруса, в - жесткие паруса-крылья, г - авторотирующий пропеллер, д - вращающийся ротор, работа этого ротора основана на эффекте Магнуса.
На рис. 33 показаны судовые ветродвижители, т.е. движители, которые используют энергию ветра.
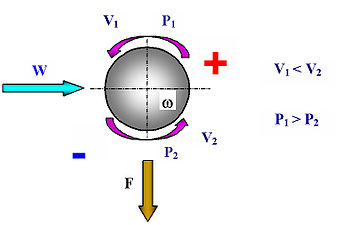
Рис. 35. Эффект Магнуса.
Схема эффекта Магнуса изображена на рис. 35. Многие этот эффект наблюдали при исполнении так называемого "крученого мяча" в настольном теннисе или футболе. Суть его в следующем. Цилиндр (или шар) вращается в определенную сторону. Стрелкой показано направление вращения (ω - скорость вращения). Цилиндр находится в потоке ветра, показанного стрелкой W. Когда скорости ветра W и вращения цилиндра ω складываются (внизу на рис. 35), общая скорость V2 увеличивается. При увеличении скорости, согласно закону Бернулли, давление P2 в потоке воздуха падает (на схеме стоит знак минус "-").
С другой стороны (сверху) скорости вычитаются, общая скорость V1 уменьшается (V1 < V2), и давление P1 увеличивается (P1 > P2 - на схеме показан знак плюс "+"). Так образуется сила F, направленная перпендикулярно к потоку, которую можно использовать для движения судна[133].
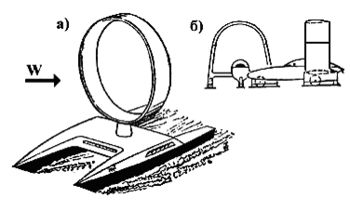
Рис. 36. Паруса крылья с минимальными кольцевыми потерями: а - кольцевое крыло; б - полукольцевое крыло.
Пример 49. Как известно эффективность паруса и крыла, прежде всего, определяется их общей площадью, поэтому их делают как можно выше. Однако удлинение парусов и крыльев приводит к уменьшению остойчивости судна. Оригинальное решение этого противоречия - кольцевые и полукольцевые паруса-крылья (рис. 36) [134].

Рис. 37. Самолет с кольцевидным крылом
Аналогичное решение предложено использовать и в авиации (рис. 37). По замыслу авторов, такое крыло в два раза меньше обычного, но из-за особенностей движение воздуха в "трубе" обеспечивают необходимую подъемную силу.

Рис. 38. Ветродвижитель - пропеллер соединен с гребным винтом.

Рис. 39. Патент Франции № 2 607 557.
Пример 50. В 1924 г. Французский инженер Константен, воскрешая идею XVIII в., предложил применить ветродвигатели для движения судов (рис. 38). Вращение вала ветродвигателя передается с помощью трансмиссии, содержащей двойную угловую зубчатую передачу и вал, на обычный гребной винт, движущий судно [135].
Пример 51. Французский корабел М.Мар предложил в качестве движителя использовать ветряк (пропеллер)[136]. Трехлопастной ротор приводит в движение генератор, полученная электроэнергия питает электродвигатель, который вращает гребной винт (рис.39). Управление ротором проводится с помощью бортового компьютера, который устанавливает ротор против ветра и меняет шаг лопастей.
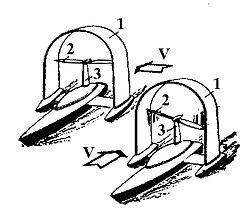
Рис. 40. Судно с комбинированной ветроэнергетической установкой. а - при движении боковым ветром (работает крыло); б - при движении встречным и попутным ветрами (работает ветродвигатель). 1 - полукольцевой жесткий парус; 2 - ветродвигатель; 3 - трансмиссия к гребному винту.
Пример 52. Возможна комбинация ветродвижителей, например, крыла и пропеллера. На рис. 40 показано судно с комбинированной ветроэнергетической установкой[137]. Установка состоит жесткого полукольцевого паруса-крыла с высоким аэродинамическим качеством, которое обеспечивается большим удлинением крыла и шайбами на нижних кромках крыльев. Система крыльев имеет механизм установки необходимого угла атаки. Внутри контура, охватываемого полукольцевым крылом, по оси симметрии крыла размещен самоориентирующийся по ветру крыльчатый ветродвижитель с горизонтальной осью, для которого жесткий парус служит габаритным ограждением для ветродвигателя во время его вращения.
При движении боковыми ветрами силу тяги создает жесткое полукрыло, а ветродвигатель застопорен, лопости его установлены горизонтально и развернуты во флюгерное положение. В таком положении ветродвигатель практически не влияет на работу крыла. В случае движения острыми курсовыми углами или прямо против ветра, когда парус не тянет, работает ветродвигатель самоориентируясь по каждому ветру, а полукольцевой жесткий парус устанавливается в плоскости вращения колеса и служит для него аэродинамической насадкой. Мощность от ветродвигателя через трансмиссию передается на гребной винт, вызывая движение судна.
При попутных ветрах полукольцевой жесткий парус в силу конструктивных условий (угол установки его ограничен) создает малую тягу, поэтому движение судна осуществляется также с помощью ветродвигателя. Реверс производится гребным винтом регулируемого шага (ВРШ).
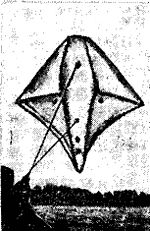
Рис. 41. Движитель - "воздушный змей".
Такое судно может успешно двигаться всеми курсами относительно ветра, минуя "мертвые зоны", и более эффективно использовать энергию ветра.
Пример 53. В Англии в качестве движителя использовали воздушный змей [138]. Крупная прямоугольная конструкция обтягивается прочной синтетической пленкой и заполняется гелием. На змее установлена метеорологическая аппаратура, которая передает информацию на судно. Змеем можно управлять с помощью перетекания газа во внутренних отсеках.
Подобное решение, но более простое в осуществлении предлагает английский изобретатель К.Стюарт. Он разработал надувной пластиковый "воздушный змей", который наполняется гелием и запускается с палубы судна. По сути, это тот же парус, но без мачты. Преимущество его в том, что этот "парус" может использовать потоки на высоте даже тогда, когда над морской гладью царит безветрие. Изобретатель приспособил свой движитель к небольшой яхте и несколько раз переплыл на ней Ла-Манш. Автор утверждает, что без принципиальных изменений его парус можно применить на судах водоизмещением до 150 тонн (рис. 41)[139].

Рис. 42. Роторные суда А.Флетнера.
Пример 54. Роторные суда, изобретены немецким авиационным инженером и изобретателем Антоном Флетнером [75]. Работа движителя А.Флетнера [76] основана на эффекте Магнуса (рис. 34). Роторные суда (рис. 42) имеют от одного до трех вертикальных цилиндров-роторов, вращаемых вспомогательным двигателем.

Рис. 43. Проект "Аврора".
Пример 55. Из всех районов Земли наиболее полно энергию ветра можно использовать в Южном океане, ограниченном Австралией, Африкой, Южной Америкой и Антарктидой.
В проекте "Аврора" парус - это парашют длиной 450 м и диаметром чуть меньше 1 км, связанный с забалластированным поплавком и движущийся на высоте 170-300 м над уровнем воды (рис. 43).
Высота над уровнем океана, даже при отсутствии ветра, поддерживается гелием или водородом, заполняющим специальные камеры парусов[140].
Двигатель
В качестве двигателей в судах используют: дизель, турбина, атомный реактор и значительно реже - ветер и электродвигатель. Раньше использовали паровой двигатель. Наиболее часто встречающиеся в настоящее время двигатели показаны на рис. 44 [141].
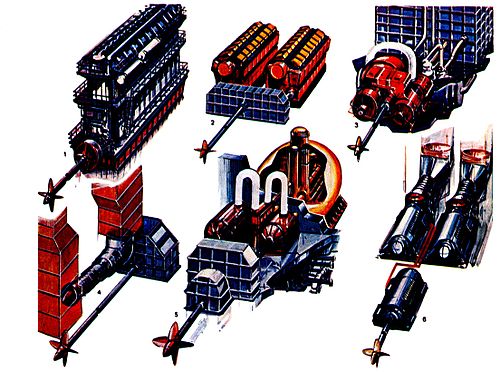
Рис. 44. Судовые энергетические установки. 1 - низкооборотный дизель, непосредственно работающий на гребной винт; 2 - дизель-редукторная установка 3 - паротурбинная установка; 4 - газовая турбина; 5 - атомная установка; 6 - газотурбинная установка с электрической передачей на винт.
Корпус
Рис. 44. Количество корпусов. а) 1 корпус, б) 2 корпуса – катамаран, в) 3 корпуса – тримаран, г) 4 и более корпусов – полимаран.
Корпуса могут отличаться по их количеству, виду и материалу, из которого они сделаны.
§ количество корпусов (рис. 45) 1 корпус (рис. 45 а), 2 корпуса – катамаран (рис. 45 б), 3 корпуса – тримаран (рис. 45в), 4 и более корпусов – полимаран (рис.45 г).
§ материал корпуса: папирус, тростник (рис. 46), дерево, металл, пластмасса, стеклоткань и т.д.
§ вид корпуса: плот (рис. 47), водоизмещающий корпус (рис. 48), полупогруженный корпус (рис. 49), с подводными крыльями (рис. 50), на воздушной подушке (рис. 51), экраноплан (рис. 52), подводное судно (рис. 53).
§ 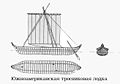
Рис. 46. Южноамериканская тростниковая лодка
§ 
Рис. 47. Инкский плот
Рис. 48. водоизмещающий корпус
Рис. 49. Полупогруженное судно
Рис. 50. Судно на подводных крыльях
Рис. 51. Судно на воздушной подушке
§ 
Рис. 51. Экраноплан
§ 
Рис. 52. Подводное судно
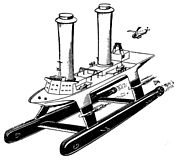
Рис. 54. НИС, предложенное С.Бэрроном.
Пример 56. Научно-исследовательское судно (НИС), предложенное Стивеном Бэрроном (рис. 54), имеет полупогруженный корпус и роторный движитель[142].
Система управления
Системы управления могут быть: непосредственные, дистанционные; ручные, механические, полуавтоматические, автоматические.
Пример 57. В автомобиле человек непосредственно управляет машиной – это непосредственная система управления. Луноходом управляли с Земли – это дистанционное управление. Когда-то автомобилем управляли в ручную, далее стали использовать усилитель руля – это механическое управление. На следующем этапе на отдельных не сложных этапах дороги можно было поручить управление полуавтомату. Сегодня существует автомобиль который полностью управляется автоматически.
Мы показали только некоторые из видов минимально необходимых частей системы, с выявления и выбора которых начинается проектирование новой системы. В дальнейшем мы используем другие законы организации систем. Осуществляется минимальное согласование между частями системы, устанавливаем связи между ними, и подбирает дополнительные элементы. Как правило, эти операции проделываются несколько раз не разных уровнях (системы, надсистемы, окружающей среды и подсистем).
Не нашли, что искали? Воспользуйтесь поиском: