ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Савченко Татьяна Николаевна
Александров Юрий Иосифович
Официальные оппоненты: Доктор психологических наук, профессор
Черноризов Александр Михайлович
Кандидат психологических наук, доцент
Савченко Татьяна Николаевна
Ведущая организация: Институт высшей нервной деятельности и нейрофизиологии Российской академии наук
Защита состоится 28 мая 2007г. в 11 часов на заседании диссертационного совета Д002.016.03 при Институте психологии РАН по адресу: 129366, Москва, ул.Ярославская, 13.
С диссертацией можно ознакомиться в библиотеке Института психологии РАН.
Автореферат разослан «» 2007г.
Ученый секретарь
диссертационного совета
кандидат психологических наук Никитина Е.А.
Общая характеристика работы.
Актуальность темы.
Традиционно в «сопоставляющей психофизиологии» психические явления напрямую сопоставляются с локализуемыми элементарными физиологическими явлениями, что неизменно приводит к рассмотрению психологических и физиологических процессов как тождественных, параллельно протекающих или взаимодействующих [Александров Ю.И., 2004]. Такое положение отражается в программах редукционизма и элиминативизма, предполагающих поэтапное замещение психологии нейробиологией [Иванов-Смоленский А.Г, 1929; Churchland P.S., 1986; Gold I., Daniel S., 1999].
В системной психофизиологии [Швырков В.Б., 1995; Александров Ю.И. и др., 1997; Александров Ю.И., 2004] реализуется иное решение психофизиологической проблемы (В.Б. Швырков, 1978), принадлежащее к группе «двухаспектных решений» [Спенсер Г., 1897; Бехтерев В.М., 1991; Chalmers D.J., 1995; Прист С., 2000]: психическое и физиологическое являются разными аспектами рассмотрения одних и тех же системных процессов, организующих активность физиологических элементов в пределах всего организма для достижения тех или иных полезных результатов.
Если в сопоставляющей психофизиологии используется методика предъявления стимулов, то в системной психофизиологии используется методика «погружения в среду» («embodied and situated agent» [Brooks R. A., 1991]) и свободное поведение. В первом случае экспериментатор задает ситуации, с которыми сталкивается испытуемый (агент), во втором случае испытуемый сам влияет на то, в каких ситуациях он окажется.
До сих пор, однако, не был в достаточной мере рассмотрен вопрос о месте двух упомянутых типов методик в научном исследовании, об ограничениях, которые они, возможно, накладывают на тип исследования и характер получаемых результатов [Brembs B., et al., 2004]. Между тем ответ на этот вопрос позволил бы продвинуться в разработке представлений о специфике и области применения методики предъявления стимулов в психологии и, в частности, в психофизиологии. «Генеральной линией развития психологии (и смежных с ней наук) является... более глубокая разработка специфически психологических методик исследования, основанных на философски фундированной методологии» – соглашаясь с С.Л. Рубинштейном, писал А.В. Брушлинский еще в 1979 [Брушлинский А.В., 1979].
Организация экспериментальный среды во многом предопределяет характер получаемых данных. Например, в ситуации предъявления стимулов удобно трактовать изменения активности организма, связанные по времени со стимулом, как реакции. Теория рефлекса достигла определенных успехов в описании активности организма в этом случае. Напротив, при «погружении в среду», в свободном поведении, испытуемый сам влияет на то, какие ситуации складываются в среде и на их последовательность. В этом случае учет только лишь рефлекторных детерминант может оказаться недостаточным. Поэтому актуальным представляется исследование взаимодействия рефлекторного агента со средой при использовании методики погружения в среду. В качестве агента может рассматриваться как человек и животное, так и модель, реализующие поведение (обзор содержания понятия «агент» см. в [Franklin S., Graesser F., 1996]). Поскольку вопрос о том, является ли живой агент (человек, животное) рефлекторным, остается спорным [Анохин П.К., 1978; Швырков В.Б., 1978; Александров Ю.И., 2004; Schall J.D., 2001], важно изучить именно модель рефлекторного агента в компьютерном эксперименте. Такой подход гарантирует, что агент будет адекватно описываться рефлекторной теорией (РТ).
Поскольку модель позволяет проводить измерение всех интересующих исследователя переменных, работа с компьютерной моделью, в отличие от экспериментов с живыми агентами, позволит выявить закономерности актуальной задачи, т.е. как выглядит задача с точки зрения агента (испытуемого). Далее окажется возможным сопоставление тестовой задачи с точки зрения экспериментатора с актуальной задачей. Результаты модельного эксперимента следует проверить, сравнив их с результатами поведенческих и психофизиологических экспериментов, в частности, оценить выраженность известного в РТ феномена корреляции нейронной активности с поведенческими событиями, но в условиях свободного поведения животного – при погружении его в среду, аналогичную той, в которую будет погружаться модельный агент.
В исследованиях, проводимых на основе РТ, наиболее распространены методики классического и оперантного обусловливания. Методика классического (павловского) обусловливания, принадлежит к категории методик предъявления стимулов и, с точки зрения РТ, позволяет формировать у испытуемого классический условный рефлекс. Методика оперантного обусловливания, разработанная Скиннером, близка к идее погружения в среду и с точки зрения РТ позволяет формировать у испытуемого инструментальный условный рефлекс. Задача различения классического и оперантного обусловливания была поставлена давно: «Проблема взаимоотношений между классическим и инструментальным условными рефлексами, несмотря на очевидную простоту, является одним из наиболее запутанных вопросов, которые стоят перед поведенческими и нейрофизиологическими исследованиями» [Граштьян Е., 1973, с. 350]. Однако и сегодня эта задача остается актуальной [Brembs B., et al., 2004]. Поэтому исследование рефлекторного взаимодействия со средой является актуальным также и для теории рефлекса.
Цель исследования.
Выявление особенностей рефлекторного взаимодействия агента погруженного в среду, находящегося в условиях свободного поведения.
Объект.
Агент (компьютерная модель, животное) осуществляющий свободное пищедобывательное поведение в среде (модельной и реальной, соответственно).
Предмет исследования.
Взаимодействие агента (компьютерная модель, животное) со средой.
Теоретическая гипотеза.
Взаимодействие рефлекторного агента, находящегося в условиях свободного поведения, со средой подчиняется иным закономерностям, нежели в случае, когда стимульный паттерн задается экспериментатором.
Задачи исследования:
1. определить ядро исследовательской программы, на которой основана теория рефлекса, и на базе этого определения построить модель рефлекторного агента, отражающего сущность теории рефлекса;
2. сформулировать критерии к тестовой задаче пригодной для анализа результатов с помощью сопоставляющей и системной психофизиологии;
3. выявить структуру поведения рефлекторного агента при погружении его в среду тестовой задачи;
4. выявить динамику актуальной задачи при взаимодействии рефлекторного агента со средой;
5. выявить зависимость актуальной задачи от индивидуальных особенностей рефлекторного агента, работающего с ней;
6. определить степень корреляции нейрональной активности с поведенческими событиями в условиях погружения животного в среду аналогичной тестовой задачи.
Теоретико-методологические основы исследования.
Теоретико-методологической основой исследования являются теория функциональных систем (П.К. Анохин), системно-эволюционный подход, системная психофизиология.
Методы исследования.
Для эмпирического исследования была синтезирована тестовая поведенческая задача на основе сформулированных критериев, и модель рефлекторного агента, отражающая современные представления рефлекторной теории о работе головного мозга. В качестве экспериментальной методики использовалось погружение модели рефлекторного агента в среду тестовой задачи в условиях свободного поведения – задача фуражирования. Использовалась модель обучения парадигмы «обучение с подкреплением». В эксперименте на животных они погружались в среду инструментального пищедобывательного поведения.
Эмпирическая база исследования.
В исследовании проанализирована активность нейронов разных поведенческих специализаций, зарегистрированная у 3-х животных; рассмотрено 14 категорий модельных агентов, 9 видов морфологий, всего 920 агентов. Разница морфологий заключалась в различиях структуры зрительных рецептивных полей и двигательных паттернов. Разница между категориями состояла в различии алгоритмов обучения и скорости движения у агентов с разной морфологией. Проведено 5 серий модельных экспериментов и 1 серия на животных.
Научная новизна работы.
Впервые проведено исследование, связанное с задачей выявления межпарадигмальных различий в психофизиологии, и направленное на формализацию аналитических особенностей применяемых в психофизиологии методик. Оригинальным является выявление ядра исследовательской программы, на которой основана теория рефлекса. На этой основе построена модель рефлекторного агента, отражающая суть концепции реагирования. Разработан новый алгоритм модельного обучения и показаны его преимущества перед классическим.
Теоретическое значение.
Проведенная формализация концепции реагирования может способствовать более глубокому пониманию достоинств и недостатков рефлекторной теории. Показано, что вероятность активации нейронов в окрестности поведенческого события выше, чем вероятность возникновения события при возникновении нейронной активности. Следовательно, возникновение известного в РТ феномена – повышенной частоты спайковой активности нейрона в окрестности поведенческого события, может быть объяснено иначе, нежели реакция на стимул, ввиду того, что аналогичное явление получено в экспериментах в свободном поведении.
Практическая значимость.
Полученные результаты демонстрируют специфику экспериментальной методики погружения в среду и методики предъявления стимулов и могут быть использованы при планировании психологических и, в частности, психофизиологических экспериментов; применяются в моделировании процесса научения; используются в курсе «Системная психофизиология» и программе преподавания по курсу «Психофизиология». Разработанный алгоритм обучения может применяться в практических приложениях в области искусственного интеллекта. Разработанный метод сопоставления нейронной активности с поведенческими событиями внедрен в программное обеспечение системы обработки психофизиологических данных – в программу NeuRu.
Положения, выносимые на защиту:
· При погружении в среду динамика задачи зависит от поведения агента: вероятность возникновения какой-либо ситуации зависит от предыдущей ситуации, от предыдущего действия и опыта рефлекторного агента; вариация сложности субзадач, с которыми сталкивается рефлекторный агент, порождается собственными действиями агента в среде – агент ненаправленно реструктурирует среду.
· В отличие от фиксированной актуальной задачи в методике предъявления стимулов, рефлекторный агент своим взаимодействием со средой в свободном поведении влияет на актуальную задачу, которая поэтому оказывается различной для одного и того же агента на разных стадиях обучения и для разных агентов, работающих с ней.
· Ядро исследовательской программы, на которой основана теория рефлекса, можно выразить следующим образом: индивид в своем действии и состоянии объективно отражает предшествующий внешний сигнал. Это утверждение представимо следующей формулой: действие(t + τ) = f(внешний сигнал(t)), где временная задержка τ > 0, t – время, f – функциональная зависимость.
Апробация.
Результаты диссертационного исследования докладывались и обсуждались на конференции молодых ученых по проблемам высшей нервной деятельности, посвященной 90-летию со дня рождения Л.Г.Воронина (Москва, 1998), конференции молодых ученых «Системная организация физиологических функций» (Москва, 1999), семинаре по когнитивной психологии Хельсинского технологического университета (Хельсинки, Финляндия, 2000), международной школе-семинаре «Обучение: приобретение поведенческой компетенции» (Вюрцбург, Германия, 2000), заседании секции психофизиологии РПО (Москва, 2003), VI всероссийской научно-технической конференции «Нейроинформатика-2004» (Москва, 2004), научном семинаре Института оптико-нейронных технологий РАН (Москва, 2004), 1-й российской конференции по когнитивной науке (Казань, 2004), 9-й национальной конференции по искусственному интеллекту с международным участием (Тверь, 2004), научном семинаре лаборатории нейрофизиологических основ психики им В.Б. Швыркова Института психологии РАН (2004, 2006, 2007), III-м международном научно-практическом семинаре «Интегрированные модели и мягкие вычисления в искусственном интеллекте» (Коломна, 2005), 14-й международной конференции по нейрокибернетике (Ростов-на-Дону, 2005), VIII всероссийской научно-технической конференции «Нейроинформатика-2006» (Москва, 2006), итоговой научной сессии Института психологии РАН (Москва, 2006), 2-й международной конференции по когнитивной науке (Санкт-Петербург, 2006), 13-м международном конгрессе по психофизиологии (Стамбул, Турция, 2006), расширенном заседании лаборатории нейрофизиологических основ психики им В.Б. Швыркова Института психологии РАН (Москва, 2007).
Публикации.
По теме диссертации опубликовано 20 печатных работ.
Структура диссертации.
Диссертация состоит из введения, четырех глав, заключения и списка литературы.
Основное содержание работы
Во ВВЕДЕНИИ обосновываются актуальность и новизна исследования, определяются его цель, задачи, характеризуются предмет, объект, гипотеза исследования, научная и практическая значимость, излагаются основные положения, выносимые на защиту.
В ПЕРВОЙ ГЛАВЕ «Теория рефлекса в психофизиологии» осуществлена теоретическая проработка темы исследования: проведен анализ содержания теории рефлекса, парадигм активности и реактивности, сформулировано ядро исследовательской программы реактивности, обоснован выбор тестовой задачи для проведения эксперимента.
В соответствии с парадигмой реактивности (подробнее см. [Александров Ю.И., 2004]) поведение испытуемого рассматривается как реакции на стимулы внешней среды. Адекватной экспериментальной методикой считается предъявление стимулов и регистрация последующей мозговой активности и последующих действий испытуемого, выбранных им из ограниченного набора действий, заданных экспериментатором. В подобных экспериментах испытуемый на каждом шаге оказывается в ситуации задаваемой экспериментатором, и не может сам выбрать ее или создать. При планировании эксперимента и при трактовке результатов основной объяснительный принцип рассматриваемого явления – внешняя причина, находящаяся в прошлом [Кругликов Р.И., 1982]. Лексически такой тип атрибуции часто выражается связкой «потому что».
Сделан вывод, что применение концепции «рефлекс» к какому-либо явлению означает, что его причины ищутся в прошлом и вовне данного явления, т.е. что оно порождается, вызывается, другим внешним явлением, имевшим место в прошлом. И, несмотря на все попытки модификации (см. [Кругликов Р.И., 1982; Батуев А.С., 1991; и мн. др.]) рефлекторной теории, ее существо остается неизменным [Меницкий Д.Н., 1975; Швырков В.Б., 1978; Анохин П.К., 1980; Кругликов Р.И., 1982; Александров Ю.И., 1989; Судаков К.В. 1997; Василюк Ф.Е., 2003].
С целью выявления «ядра исследовательской программы» (термин И.Лакатоса [Лакатос И., 1995]) основанной на методологическом принципе реактивности нами проведен анализ исторического развития теории рефлекса начиная с представлений Р. Декарта. Сделан вывод о том, что ядро этой исследовательской программы можно выразить следующим образом: индивид в своем действии и состоянии объективно отражает предшествующий внешний сигнал. Данное утверждение представимо следующей формулой: Y(t + τ) = f(S(t)), временная задержка τ > 0; обозначения: S(t) – внешний сигнал воспринимаемый индивидом; Y(t) – действие индивида в момент t; f – некоторая функция. Такая формулировка означает, что между воспринимаемым внешним сигналом и последующим поведением имеется функциональная зависимость. Эта общая модель рефлекса находит свое конкретное воплощение, например, в понимании и моделировании зрения на основе РТ [Соколов Е.Н. и др., 2006; Черноризов А.М., 2007].
На основе детерминант поведения, рассматриваемых в теории функциональных систем [Анохин П.К., 1978], были сформулированы требования к тестовой поведенческой задаче, адекватной цели исследования: испытуемому должно предоставляться не менее двух альтернатив при выборе действия, позволяющих ему выстраивать индивидуальную траекторию прохождения тестового поля [Коган А.Ф., 2000]; должна варьировать мотивация [Seth A.K., 1998; Baldassarre G., 2000]; ситуация в среде должна зависеть от совершенных агентом актов, в т.ч. воспринимаемая агентом ситуация определяется не экспериментатором, а результатами действий испытуемого и его взаимодействием с закономерностями среды [Никольская К.А., 2005]; действия должны требовать контроля правильности своего исполнения [Morasso P.G., et al., 1999]; задача должна решаться последовательностью действий и результаты промежуточных действий не должны быть представлены непосредственно в среде [Colombetti et al., 1994]. Следовательно, агент должен быть погружен в среду [Brooks R. A., 1991].
ВО ВТОРОЙ ГЛАВЕ «Методика исследования рефлекторного взаимодействия со средой модельного агента и активности нейронов у животного» описаны и обоснованы методики исследования: методика обучения животных, методика регистрации нейронной активности, методика компьютерного моделирования рефлекторного агента.
Известно, что формирование пищевого поведения в раннем онтогенезе «позволяет выработать первичные навыки удовлетворения еще не сформированнных», позже возникающих потребностей [Раевский В.В., 2007, с. 193]. Поэтому модель, учитывающая формирование пищевого поведения может быть репрезентативна и для других его форм.
В качестве тестовой поведенческой задачи отвечающей приведенным выше критериям мы выбрали задачу фуражирования (ее вариации см. в [Araujo E.G., Grupen R.A., 1996; Baldassarre G., 2000; Seth A.K., 1998; Barandiaran X., 2002]) – агент движется на плоскости, «поедая» пищевые объекты. Среда (Рис.1) представляет собой развертку тора на плоскости, в которой изначально равномерно разбросано 42 пищевых объектов. После «поедания» агентом одного объекта, в случайном месте появляется новый объект. Такая тестовая задача аналогична той, которую решает животное [Непомнящих В.А., 2003], двигаясь в поисках пищи и имея ограниченный сектор обзора.
Поставленная нами тестовая поведенческая задача фуражирования вписывается в контекст парадигмы «обучение с подкреплением» [Sutton R. S., Barto A. G., 1998] – захват пищи рассматривается как получение подкрепления и закрепляет рефлексы приведшие к этому событию.
Существующие в психологии модели процесса принятия решения не рассматривают динамику непрерывного взаимодействия человека со средой, человека погруженного в среду [Савченко Т.Н., Иванова Л.В., 2007], однако такая модель принятия решения разработана в сопоставляющей психофизиологии. В современной редакции рефлекторной теории предполагается [Houk C. J., et al., 1995; Redgrave P., et al., 1999; Doya K., 1999], что принятие решений, выбор действия, осуществляется в базальных ганглиях головного мозга, и этот процесс моделируется с помощью алгоритма научения Actor/Critic парадигмы «обучение с подкреплением» [Sutton R. S., Barto A. G., 1998; Baldassarre G., 2002], который и был нами использован как отражающий современные представления в моделировании мозгового обеспечения рефлекторного научения [Houk C. J., 1995; Baldassarre G., 2002; Мержанова Г.Х., Смирнитская И.А., Фролов А.А., 2005].
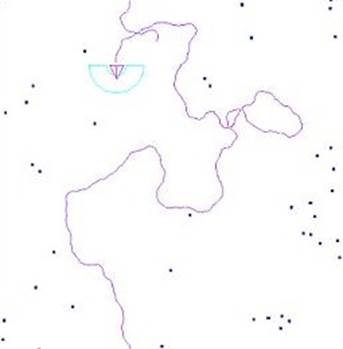
Рисунок 1. Среда модели. Точки – объекты. Линией показана траектория движения агента за последние 1000 тактов. Можно заметить, что за счет «поедания» объектов по линии движения агента, образуются скопления объектов в не посещенных им местах. Также имеются крупные участки, не содержащие объектов. Объекты оказываются размещенными неравномерно. Таким образом, агент, взаимодействуя со средой, реструктурирует ее.
Далее обосновывается, что модель, реализованная нами, удовлетворяет методологии РТ [Василюк Ф.Е., 2003].
Первые пять серий проведены на компьютерной модели. В первой серии экспериментов в процессе работы компьютерной модели в данной задаче в режиме постоянной мотивации (голод) для каждого возможного действия собиралась марковская статистика переходов из состояния в состояние: <состояние(t), действие(t), состояние(t+1)>. Для определения роли индивидуальных характеристик агента, такие данные сопоставлялись для четырех видов морфологий агента (разница морфологий заключалась в различиях структуры зрительных рецептивных полей) и при двух вариантах величины поискового шага. Во второй серии использовался режим мотивации с насыщением, и регистрировалось время, которое агент затрачивает на поиск очередного пищевого объекта. В третьей серии экспериментов анализировалась динамика оценок ситуаций в процессе обучения. В четвертой серии сравнивались сформулированный нами алгоритм обучения SDD и известный из литературы алгоритм Actor/Critic. В пятой серии сопоставлялись динамика обучения рефлекторного агента, владеющего информацией только о текущей ситуации, и рефлекторного агента, владеющего информацией о текущей и предшествующей ситуациях.

Рисунок 2. Сопоставление активности нейрона с поведенческим событием. В верхней части показаны растры спайковой активности нейрона построенные относительно поведенческого события. Вертикальная линия – поведенческая отметка. Внизу – гистограмма нейронной активности. По оси ординат – число спайков в бине, ширина бина – 50 мсек.
В шестой серии анализировалась активность нейронов кролика в пищедобывательном поведении и сопоставлялась с поведенческими отметками (рис. 2). Данные регистрации предоставлены сотрудником лаборатории нейрофизиологических основ психики Института психологии РАН Созиновым А. А. Нейрон считался активированным при превышении им частоты импульсации в окне (от 50 до 500 мс) в 1.5 раза выше фоновой частоты.
В ТРЕТЬЕЙ ГЛАВЕ «Результаты экспериментального исследования взаимодействия со средой» и в ЧЕТВЕРТОЙ ГЛАВЕ «Обсуждение результатов исследования рефлекторного взаимодействия со средой» представлены полученные результаты и их обсуждение.
Агент успешно решает данную тестовую задачу, обучаясь набору рефлексов типа «если объект справа, то поворот вправо», «если объект в области захвата, то захват». В текущем поведении он выполняет выученные рефлексы, независимо от того, приводят ли они сейчас к положительному эффекту.
Рефлекторный агент оказывается способен продемонстрировать феномен «превентивного поведения»: агент ищет пищу даже при отсутствии мотивации (нет голода), что позволяет ему затем сократить длительность ситуации голода. В первой (модельной) серии экспериментов выявлена зависимость вероятности возникновения какой-либо ситуации от предыдущей ситуации, от предыдущего действия и опыта агента (рис. 3).
Вследствие обучения, для агента меняется вероятность оказаться в той или иной ситуации, несмотря на неизменные закономерности тестовой задачи. Например, вероятность оказаться в ситуации «видны 2 объекта» растет в процессе обучения более чем в 1.5 раза. С точки зрения РТ это означает, что рефлекторный агент в свободном поведении способен до некоторой степени определять, какие стимулы он получит. В другой модельной работе это свойство названо “self-selecting of input stimuli” [Nolfi S., 1993].
Показано, что возникновение какой-либо ситуации зависит от предшествующей ситуации и от опыта агента. Например, вероятность того, что объект окажется в области захвата, если до этого он был справа, составляет 0.04 в начале обучения. В конце обучения эта величина составляет более 0.15. В терминологии РТ это означает, что очередной стимул зависит от предыдущего и от опыта испытуемого. Такая зависимость исключается в методике предъявления стимулов, поскольку стимулы принято предъявлять в случайном порядке.
Показано, что возникновение какой-либо ситуации зависит от предшествующей ситуации, от выбранного агентом действия, и от опыта агента. Например, вероятность того, что объект окажется в области захвата, если до этого он был справа и совершается действие «поворот влево» (неверное), составляет около 0.05 в начале обучения. В конце обучения эта величина составляет уже около 0.1. В терминологии РТ это означает, что очередной стимул зависит от предыдущего стимула, от предыдущей реакции испытуемого, и от опыта испытуемого.
Для всех рассмотренных морфологий и для обоих значений поискового шага оказалось (табл.1), что правильное действие, по сравнению с неправильным, имеет более высокую вероятность успеха (завершения подхода к объекту), причем разница иногда достоверна уже в начале обучения, и всегда достоверна к концу обучения; вероятность потери объекта вследствие правильного действия достоверно ниже вероятности потери объекта вследствие неправильного действия.

Рисунок 3. Пример зависимости последующей ситуации от текущей ситуации, от действия агента и его опыта. По ординате показана вероятность возникновения соответствующей ситуации после действия «поворот влево» (неверным) в ситуации «объект виден справа». Светлые столбцы – в начале обучения, темные – в конце. (Усреднение по 100 реализациям модели.) S0 – нет объекта в области видимости, S1 – один объект в области видимости, S2 – два объекта в области видимости, S+ – есть объект в области захвата. Различия достоверны (φ-критерий Фишера, p < 0.001).
Таблица 1. Вероятность успешности действий в ситуации «виден объект». Роль индивидуальных особенностей агентов. S0 – нет объекта в области видимости, S1 – один объект в области видимости, S2 – два объекта в области видимости, S+ – есть объект в области захвата. Звездочкой помечена достоверность различий (φ-критерий Фишера, p < 0.001).
| Параметры | Вероятность успешности верного/неверного действий | |||||
| М | угол | обучен | S0 | S1 | S2 | S+ |
| М1 | 22.5 | нет | *0/0.3 | 0.92/0.64 | 0.01/0.01 | 0.07/0.05 |
| М1 | 22.5 | да | *0/0.16 | 0.77/0.72 | 0.08/0.03 | *0.15/0.1 |
| М1 | 67.5 | нет | *0.01/0.82 | 0.71/0.18 | 0.02/0 | *0.26/0 |
| М1 | 67.5 | да | *0.02/0.81 | 0.52/0.18 | 0.07/0.01 | *0.4/0.01 |
| М2 | 22.5 | нет | *0/0.17 | 0.87/0.65 | 0.09/0.15 | 0.04/0.03 |
| М2 | 22.5 | да | *0/0.11 | 0.72/0.77 | 0.19/0.07 | *0.09/0.05 |
| М2 | 67.5 | нет | *0/0.44 | 0.69/0.43 | 0.19/0.12 | *0.12/0.01 |
| М2 | 67.5 | да | *0.01/0.57 | 0.55/0.35 | 0.21/0.07 | *0.23/0.01 |
| М3 | 22.5 | нет | *0/0.6 | 0.9/0.37 | 0/0 | 0.1/0.03 |
| М3 | 22.5 | да | *0/0.46 | 0.77/0.46 | 0.06/0.02 | *0.17/0.06 |
| М3 | 67.5 | нет | *0.59/0.97 | 0.28/0.03 | 0/0 | *0.13/0 |
| М3 | 67.5 | да | *0.46/0.87 | 0.32/0.11 | 0.03/0.01 | *0.19/0.02 |
| М4 | 22.5 | нет | *0/0.48 | 0.95/0.48 | 0.01/0.03 | 0.04/0.01 |
| М4 | 22.5 | да | *0/0.38 | 0.76/0.54 | 0.15/0.05 | *0.09/0.03 |
| М4 | 67.5 | нет | 0.48/0.59 | 0.46/0.4 | 0.01/0.01 | 0.05/0 |
| М4 | 67.5 | да | *0.33/0.68 | 0.46/0.27 | 0.1/0.03 | *0.11/0.02 |
Таким образом, показано, что тестовая задача с точки зрения экспериментатора и с точки зрения агента могут оказываться различными. Актуальная задача (т.е. задача, с которой сталкивается агент) определяется взаимодействием агента с тестовой задачей, проявляется при погружении агента в среду, и зависит от свойств агента: морфологии, алгоритма обучения, алгоритма принятия решения, структуры памяти, опыта, величины поискового шага процедуры поиска решения. Формальное описание задачи, выражаемое оценкой успешности действий, зависит от индивидуальных особенностей агента (параметров морфологии агента и величины поискового шага). Одна и та же с точки зрения экспериментатора тестовая задача может оказываться различной для разных агентов, работающих с ней (табл.1). Также, закономерности задачи оказываются различными для одного и того же агента на разных стадиях обучения (табл.1). Например, вероятность успешного завершения (подхода к объекту слева) правильного действия (поворот влево) увеличивается в процессе обучения в 2 раза, хотя это не задается экспериментатором. Формальное и объективное описание, выражаемое полученными в экспериментах вероятностями переходов в графе задачи, варьирует даже в процессе обучения, а значит, может быть выявлено только в эксперименте.
Показано, что агент своим поведением влияет на вероятность возникновения какой-либо ситуации. Возникновение ситуации определяется не экспериментатором, как в методике предъявления стимулов, а зависит от предыдущей ситуации, от предыдущего действия и опыта агента.
Во второй (модельной) серии экспериментов было показано, что рефлекторный агент, взаимодействуя со средой, реструктурирует среду собственными действиями (рис. 1) и влияет на сложность задач, с которыми он сталкивается, что порождает неравномерное распределение сложности задач (рис. 4).
Тестовая среда такова, что вероятность появления нового объекта в любом месте среды одинакова, поэтому объекты появляются в среде равномерно. Однако обнаруживается, что в результате действий агента, объекты оказываются распределены в среде неравномерно (рис.1). Благодаря действиям агента работающего с задачей происходит реструктуризация среды. В результате этого, агент, собрав объекты на одном локальном участке, может потратить немало времени в поисках следующего объекта (рис.1).

Рисунок 4. Вариативность сложности субзадачи «поиск и захват одного объекта», порожденная действиями агента. (Пример одной из реализаций модели.) По горизонтали – случаи решения субзадачи пересортированные в порядке возрастания времени решения. По вертикали – время в тактах, затрачиваемое на решение.
Сложность субзадачи поиска очередного объекта оценивалась как время, затрачиваемое на ее решение, т.е. на обнаружение объекта, подход к нему и захват. Оказалось, что сложность этой субзадачи имеет экспоненциальный характер роста (рис. 4), что обусловлено взаимодействием агента со средой, как это описано выше. С точки зрения методики предъявления стимулов это означало бы, что испытуемому предъявляются задачи, сложность которых имеет экспоненциальный характер роста, в то время как в этой методике принято предъявлять задачи примерно одинаковой сложности для последующего усреднения результатов.
В третьей (модельной) серии экспериментов показано, что в парадигме обучения с подкреплением оценки получаемых ситуаций варьируют, не представляя возможным классифицировать действия на успешные и неуспешные по величине изменения оценки ситуации (рис. 5). В следующей серии было показано, что предложенный нами алгоритм научения способен это делать в данной задаче.

Рисунок 5. Динамика оценок ситуаций в процесс обучения (А), и значения этих оценок в конце обучения (Б). А: по горизонтали – время в тысячах тактов, по вертикали – оценки ситуаций. Б: по горизонтали – ситуации, по вертикали – оценки этих ситуаций. S- – нет объекта в области видимости, S1 – один объект в области видимости, S2 – два объекта в области видимости, S+ – объект в области захвата, S1+ – есть один объект в области видимости и еще один объект в области захвата, S2+ – один 2 объекта в области видимости и еще один объект в области захвата. Переход из ситуации S1 в S- означает потерю объекта, «неуспех». Переход из ситуации S1 в любую из S+, S1+, S2+ означает «успех». Показаны значения изменения оценки текущей ситуации при таких переходах. Видна численная вариативность значения успешного перехода.
В четвертой (модельной) серии экспериментов показано, что предложенный нами алгоритм обучения SDD имеет иной характер кривой научения, чем классический алгоритм Actor/Critic, и обучение на его основе происходит быстрее (рис. 6).

Рисунок 6.. Средняя результативности 100 агентов, собирающих объекты, работающих по алгоритмам SDD и Actor/Critic. По горизонтали – время в тысячах тактов, по вертикали – число успешных захватов пищи за 1000 тактов. SDD демонстрирует больший рост результативности в начале обучения.
В данной задаче «правильное» действие отличается от «неправильного» не столько количественно, сколько качественно: различия в успешности статистически значимы даже на начальном этапе научения (табл.1). Алгоритм обучения SDD, построенный нами на основе выявления этого различия, доказал свою эффективность в эксперименте. Алгоритм SDD демонстрирует больший рост эффективности поведения на начальном этапе обучения по сравнению с Actor/Critic, и иную кривую научения – экспоненциальную, в отличие от S-образной у Actor/Critic.
В пятой (модельной) серии экспериментов показано (рис. 7), что рефлекторный агент обучается разным рефлексам взаимозависимо, рефлексы дополняют друг друга. Например, агент (рис.7, кривая С) повышает успешность подхода к объекту не только особой организацией собственно поведения подхода к обнаруженному объекту, но и соответствующей подстройкой поискового поведения.
Рефлекторный агент не предназначен для решения задач требующих, для принятия на данном шаге решения о будущем действии, учета не только текущей сенсорной ситуации, но и учета совершенных ранее действий и полученных результатов. Однако, в этом случае (агент типа С) вследствие изменений одной части рефлексов могут поменяться закономерности актуальной задачи, что ослабляет негативное влияние на результативность другой части – менее эффективных рефлексов. И за счет изменения величины поискового шага (табл.1) рефлекторный агент может увеличить свою результативность.
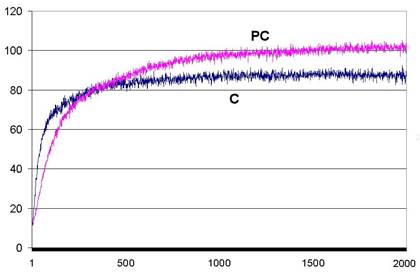
Рисунок 7. Средняя результативность двух типов агентов. C - обладающий информацией о текущей ситуации. PC - обладающий информацией о текущей и о предшествующей ситуациях. Усреднение по 80 реализациям. Агент типа PC обучается несколько медленней, но достигает большей эффективности. По горизонтали – время в тысячах тактов, по вертикали – число успешных захватов пищи за 1000 тактов.
В шестой серии (на животных) показано, что вероятность активации нейронов в окрестности поведенческого события выше, чем условная вероятность возникновения события при условии возникновения активации нейронов (рис. 8). Эффект наиболее выражен для активности нейронов, специализированных относительно некоторого поведенческого события, при рассмотрении относительно именно этого события (рис. 8, категории 1, 3). Возникновение известного в РТ феномена – повышенной частоты спайковой активности нейрона в окрестности поведенческого события, может быть объяснено иначе, нежели реакция на стимул, ввиду того, что аналогичное явление получено в экспериментах при отсутствии внешней стимуляции, задаваемой экспериментатором – при свободном поведении.
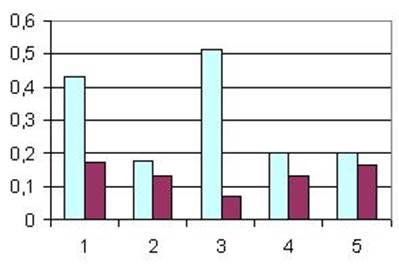
Рисунок 8. Вероятность активации нейронов при условии поведенческого события (левые столбцы, светлые), и вероятность поведенческого события при условии активации нейрона (правые столбцы, темные). По абсциссе: 1 – активность нейронов, специализированных относительно ранних элементов опыта, в сопоставлении с соответствующим поведенческим событием; 2 – то же, в сопоставлении с другим событием; 3 – активность нейронов, специализированных относительно более поздних элементов опыта, в сопоставлении с соответствующим поведенческим событием; 4 – то же, в сопоставлении с другим событием; 5 – активность нейронов, не специализированных относительно рассматриваемых поведенческих событий. Показаны средние данные по 36 нейронам.
В ЗАКЛЮЧЕНИИ подведены итоги выполненной работы. В частности, раскрывается, каким образом результаты нашего исследования свидетельствуют в пользу того, что категория методик погружения в среду позволяет изучать более широкий класс феноменов и зависимостей по сравнению с категорией методик предъявления стимулов. Рефлекторный агент, успешно решая задачи, построенные на основе методики предъявления стимулов, имеет некоторые ограничения в эффективности, решая задачи при погружении в среду. Полученные данные, однако, не исключают возможности применения методики основанной на предъявлении стимулов для исследования таких форм взаимодействия испытуемого со средой, в которых он не способен влиять на ситуацию.
Выводы:
1. Ядро исследовательской программы, на которой основана теория рефлекса, можно выразить следующим образом: индивид в своем действии и состоянии объективно отражает предшествующий внешний сигнал. Иными словами, между воспринимаемым внешним сигналом и последующим поведением имеется функциональная зависимость.
2. Тестовая задача фуражирования удовлетворяет предъявленным критериям к тестовой задаче: задача решается последовательностью действий; в каждый момент времени агент имеет возможность выбора действия; выбранное действие влияет на последующую ситуацию, однако последствия действий неопределенны.
3. На уровне поведения рефлексы в данной задаче обеспечивают успешное пищедобывательное поведение, однако последствия рефлексов в «обучении с подкреплением» оказываются неоднозначны. Показано наличие зависимости вероятности возникновения какой-либо ситуации от предыдущей ситуации, от предыдущего действия и опыта испытуемого (в терминологии теории рефлекса – зависимость вероятности предъявления данного стимула от типа предыдущего стимула, реакции на него испытуемого и его опыта).
4. Закономерности актуальной задачи различны для одного и того же агента на разных стадиях обучения, и могут быть выявлены только в эксперименте.
5. Одна и та же с точки зрения экспериментатора тестовая задача может оказываться различной для разных агентов, работающих с ней.
6. Условная вероятность активации нейронов при условии появления поведенческого события выше, чем условная вероятность возникновения события при условии возникновения нейронной активности. Выявленная закономерность позволяет объяснить, почему известный в РТ феномен повышенной частоты спайковой активности нейрона в окрестности поведенческого события может проявляться вне связи с предъявлением стимулов.
Публикации по теме диссертации:
1. Крылов А.К. Математическое моделирование спайковой активности нейрона на основе системно-эволюционной теории // Тезисы конференции молодых ученых по проблемам высшей нервной деятельности, посвященная 90-летию со дня рождения Л.Г.Воронина, М.: МГУ, 1998. С.15.
2. Крылов А.К. Математическое моделирование закономерностей организации поведения на основе системно-эволюционной теории // Тезисы конференции молодых ученых «Системная организация физиологических функций». Труды межведомственного научного совета по экспериментальной и прикладной физиологии. М.: НИИ нормальной физиологии им. П.К.Анохина РАМН, 1999. Т.8. С.374.
3. Александров Ю.И., Крылов А.К. Системная методология в психофизиологии: от нейронов до сознания // Идея системности в современной психологии. Под ред. В.А. Барабанщикова. М.: ИПРАН, 2005. C.119-157.
4. Крылов А.К. Оценка применимости рефлекторной модели нейронной сети к поведенческой задаче. // Труды VI всероссийской научно-технической конференции «Нейроинформатика-2004». Ч.2. М.: МИФИ, 2004. С. 108-116.
5. Крылов А.К. Неадекватность представления знаний как рефлексов в когнитивной модели мобильного робота. // Материалы 1-й российской конференции по когнитивной науке. Казань: КГУ, 2004. С.138-139.
6. Krylov A.K. The smartest agent is not optimal in a motivationally driven actor/critic model // In Proceedings of the International Scientific Conferences "Intelligent Systems (IEEE AIS'04) and Intelligent CAD's (CAD-2004)". Scientific publication in 3 volumes, 2004. Vol.3. P. 21-26.
7. Крылов А.К. Вероятностный анализ «восприятия» модельным роботом тестовой поведенческой задачи фуражирования. // Труды 9-й национальной конференции по искусственному интеллекту с международным участием (КИИ-2004). М.: Физматлит, 2004. Т.3, С.1131-1138.
8. Крылов А.К. Методика психологического эксперимента: погружение в среду вместо предъявления стимулов. // Материалы 9-ой всероссийской научно-технической конференции «Состояние и проблемы измерений». М.: Изд-во МГТУ им. Н.Э.Баумана, 2004.
9. Крылов А.К. Детерминация поведения в моделях искусственного интеллекта: от реактивности к активности. // Философия искусственного интеллекта. Материалы всероссийской междисциплинарной конференции. М.: ИФ РАН, 2005. С.293-295.
10. Крылов А.К. Неопределенность результата действия в парадигме Reinforcement Learning // Труды III-го международного научно-практического семинара «Интегрированные модели и мягкие вычисления в искусственном интеллекте». М.: Физматлит, 2005. С.238-243.
11. Krylov A. Trends in modeling a neuron: from reactivity of a calculator to activity of a living cell // Материалы 14-й Международной конференции по нейрокибернетике. Ростов-на-Дону: ООО «ЦВВР», 2005. Т.2. С.227-230.
12. Александров Ю.И., Крылов А.К. Системная психофизиология и моделирование работы мозга // Материалы 14-й международной конференции по нейрокибернетике. Ростов-на-Дону: ООО «ЦВВР», 2005. Т.1. С.199-202.
13. Крылов А.К. Понятия управления и обработки информации в биологии неадекватны специфике живого // Труды всероссийской научной конференции «Управление и информационные технологии (УИТ-2005)». Санкт-Петербург, 2005. Т. 1. С. 242-245.
14. Крылов А.К. Тестовая поведенческая задача минимально необходимой сложности: скрытая динамика // Труды международных научно-технических конференций «Интеллектуальные системы» (AIS’05) и «Интеллектуальные САПР» (CAD-2005). В 3-х томах. М.: ФИЗМАТЛИТ, 2005. Т.1. С.237-244.
15. Крылов А.К. SDD - алгоритм обучения в парадигме reinforcement learning, основанный на обнаружении значимости эффектов действий // Труды VIII всероссийской научно-технической конференции «Нейроинформатика-2006». В 3-х частях. Ч.2. –М.: МИФИ, 2006. С. 38-45.
16. Крылов А.К. Организация эксперимента: погружение в среду против предъявления стимулов // Тезисы докладов 2-й международной конференции по когнитивной науке. СПб.: СПбГУ, 2006. С.328-329.
17. Крылов А.К. Предъявление стимулов или погружение в среду: модельное исследование парадигм в психофизиологии // Материалы итоговой научной конференции ИП РАН (1-2 февраля 2006г.). М.: Изд-во «Институт психологии РАН», 2006. С.111-120.
18. Krylov A.K., Alexandrov Yu.I. Modeling of a reflex-based agent situated in an environment reveals the limits of the stimuli presentation paradigm. Journal of psychophysiology. 2006. V. 61. P. 327.
19. Крылов А.К. Возможности методики погружения в среду в отличие от методики предъявления стимулов: модельное исследование. // Психофизика сегодня. М.: Изд-во «Институт психологии РАН», 2007. С.44-52.
20. Крылов А.К., Александров Ю.И., Погружение в среду как альтернатива методике предъявления стимулов: модельное исследование // Психологический журнал. 2007. Т.28. №2. С.106-113.
| <== предыдущая лекция | | | следующая лекция ==> |
| КРАТКОЕ ПОСЛЕСЛОВИЕ | | | IV. Ворона и Курица |
Не нашли, что искали? Воспользуйтесь поиском: