ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Мероприятия по снижению несинусоидальности 5 страница
Картограмма нагрузок позволяет проектировщику достаточно наглядно представить распределение нагрузок на территории промышленного предприятия. Как уже отмечалось, картограмма нагрузок предприятия состоит из окружностей, и площадь, ограниченная окружностью πr2 в выбранном масштабе m равна расчётной нагрузке соответствующего цеха Рi:
Pi=πr2m, (8.1)
откуда радиус:
 (8.2)
(8.2)

Рис. 8.1 Картограмма нагрузок цехов промышленного предприятия для активной нагрузки. Пунктиром нанесены цеха, которые должны быть построены с учётом перспективы развития. Точка А – центр нагрузок без учёта расширения производства, А1 – центр нагрузок с учётом расширения.
На рис. 8.1 изображена картограмма активных нагрузок промышленного предприятия с учётом его возможного расширения. Площадь круга характеризует величину всей нагрузки цеха, а площадь сектора – величину осветительной нагрузки. В этом случае картограмма даёт представление не только о значении нагрузок, но и об их структуре. Картограммы следует наносить на генеральный план предприятия отдельно для активной и для реактивной нагрузок (рис 8.2). Это обусловлено тем, что питание активных и реактивных нагрузок производится от разных источников.
Питание активных нагрузок обеспечивается обычно от подстанций энергосистемы или от собственной электростанции. Питание реактивных нагрузок осуществляется от конденсаторных батарей, располагаемых в местах потребления реактивной мощности, либо от синхронных компенсаторов, которые также располагаются, как правило, вблизи мест потребления реактивной мощности. Неправильный выбор места установки синхронных компенсаторов вызывает перемещение потоков реактивной мощности по элементам системы электроснабжения предприятия и вызывает потери электроэнергии.

Рис. 8.2. Картограмма нагрузок цехов промышленного предприятия для реактивной нагрузки.
Точка В – центр нагрузок без учёта расширения производства, В1 – центр нагрузок с учётом расширения.
Картограмма для активных нагрузок предназначена для выбора рационального места расположения ГПП. Картограмма реактивных нагрузок помогает определить рациональное размещение компенсирующих устройств в конкретной системе электроснабжения предприятия.
8.3 Определение условного центра электрических нагрузок.
В настоящее время существует ряд методов для аналитического определения центра электрических нагрузок.
Первый рассматриваемый метод позволяет определить центр нагрузок цеха приближённо. Так, если считать нагрузки цеха равномерно распределёнными по площади цеха, то центр нагрузок можно принять совпадающим с центром тяжести фигуры, изображающей цех в плане. Если учитывать действительное распределение нагрузки в цехе, то центр нагрузок уже не будет совпадать с центром тяжести фигуры цеха, и нахождение центра нагрузок сведётся к определению центра тяжести данной системы масс.
Наличие многоэтажных зданий цехов требует учитывать третью координату z.
Проведя аналогию между массами и электрическими нагрузками цехов Pi, координаты их центра можно определить:
 ;
;  (8.3)
(8.3)
Как показала практика проектирования систем электроснабжения, учёт третьей координаты z не требуется.
Этот метод отличается простотой, наглядностью, но точность расчётов лежит в пределах 10 %.
Разновидностью первого метода является метод, учитывающий не только электрические нагрузки потребителей, но и продолжительность работы Ti этих потребителей в течение расчётного периода времени:
 ;
;  (8.4)
(8.4)
Другие методы являются более трудоёмкими, особенно в сложных системах электроснабжения, но они могут быть использованы, когда необходима высокая точность расчётов.
Следует учесть то обстоятельство, что линии, которые связывают потребителей нагрузок с подстанцией (ГПП или ТП), координаты которой мы находим, принимаются прямолинейными. В действительности, если схема электроснабжения задана, то в зависимости от характера технологического процесса, расположения других коммуникаций и других факторов, конфигурация распределительной сети предприятия будет такова, что линии будут отклоняться от прямолинейных.
Все известные методы нахождения центра нагрузок сводятся к тому, что центр определяется как некоторая постоянная точка на генплане промышленного предприятия. Но, строго говоря, центр электрических нагрузок постоянно изменяет своё место расположение, например, из-за включения и отключения потребителей. Поэтому найденный центр нагрузок следует рассматривать как условный центр, так как определение его ещё не решает до конца задачи выбора местоположения подстанций.
Постоянное изменение местоположения центра нагрузок объясняется следующими причинами:
1) изменениями потребляемой отдельным приёмником, цехом мощности в соответствии с графиком нагрузок; график нагрузок постоянно претерпевает изменения с внедрением новых производственных процессов, внедрением нового оборудования и т.д.;
2) изменениями сменности предприятия;
3) развитием предприятия во времени.
Поэтому центр нагрузок описывает на генплане предприятия фигуру сложной формы, и поэтому правильнее говорить о зоне рассеяния центра нагрузок.
Для построения зоны рассеяния центра нагрузок используется один из методов оптимизационной задачи. В настоящее время используются два метода для решения этой задачи: статический и динамический.
При статическом методе не учитываются изменения электрических нагрузок, что может привести к принятию нерационального размещения подстанции.
При динамическом методе получаемые решения являются более обоснованными, так как учитывается изменение системы в длительный период времени. Но такой подход требует ряд дополнительных сведений, которые на начальном этапе работы предприятия не могут быть получены, особенно при нынешнем положении дел.
8.4 Определение зоны рассеяния центра электрических нагрузок для статического состояния системы.
Для определения зоны рассеяния центра нагрузок необходимо найти закон распределения координат центра электрических нагрузок. Распределение координат подчиняются нормальному закону распределения (закону Гаусса – Лапласа):
 ;
;  , (8.5)
, (8.5)
где hx, hy – меры точности случайных величин:
 ;
;  , (8.6)
, (8.6)
σх2, σу2 – дисперсия случайных координат.
Двумерная плотность распределения вероятностей случайных независимых координат выражается:
 (8.7)
(8.7)
Последнее выражение получено при условии, что начало координат совмещено с математическим ожиданием.
Нормальный закон распределения определяется математическими ожиданиями ax, ay, определяющими положение условного центра нагрузок и среднеквадратичными отклонениями σх2, σу2 или мерами их точности hx, hy.
Обычно, при определении теоретического закона распределения эти величины неизвестны и предполагается, что они совпадают с соответствующими величинами эмпирического распределения.
Числовые характеристики эмпирического распределения определяются из выражений:
 ;
;  (8.8)
(8.8)
 ;
;  (8.9)
(8.9)
и по выражениям (8.6).
После нахождения закона распределения случайных координат центра нагрузок определяется зона рассеяния центра электрических нагрузок. При пересечении поверхности нормального распределения горизонтальной плоскостью Н, проекция сечения, а, следовательно, и зона рассеяния описывается выражением:
 , (8.10)
, (8.10)
где  . (8.11)
. (8.11)
Уравнение (8.10) представляет собой уравнение эллипса, полуоси которого равны:
 ;
;  . (8.12)
. (8.12)
Исходя из [17] полуоси с вероятностью 0,95 принимают значения:
 ;
;  (8.13)
(8.13)
Таким образом, зона рассеяния центра электрических нагрузок представляет собой эллипс. Форма эллипса зависит от соотношений меры точности случайных величин hx, hy. Центр эллипса совпадает с центром нагрузок.
Координаты центра нагрузок можно в силу ряда причин рассматривать как случайные величины, тогда оси полученного эллипса рассеяния центра нагрузок параллельны осям координат на генплане предприятия. В общем же случае, из [17] оси эллипса рассеяния образуют с осями координат некоторый угол α, который определяется следующим образом:
 , (8.14)
, (8.14)
где Кк –коэффициент корреляции:
 (8.15)
(8.15)
Для ориентации осей эллипса рассеяния необходимо найти угол α, который составляют оси эллипса с осью абсцисс произвольно взятой системы координат. Угол α может иметь как положительное, так и отрицательное значение, в зависимости от выбранного положения осей координат.
Местоположение ГПП, либо другой распределительной подстанции выбирается в любой точке построенной зоны рассеяния центра нагрузок.
В некоторых случаях, когда нагрузки предприятия размещены по территории неравномерно, рациональней строить не одну ГПП, а две или несколько, поскольку зона рассеяния предприятия получается довольно обширной.
8.5 Учёт развития предприятия при определении местоположения ГПП.
В случаях, когда при проектировании предприятия не производился учёт его расширения, модернизации может возникнуть потребность изменения системы электроснабжения, так как распределительные сети не отвечают изменившимся условиям. С другой стороны, неверная оценка развития предприятия, особенно в рыночных условиях, приводит к неоправданному завышению мощности питающих трансформаторов с предполагаемой перспективой развития. Поэтому изменение предприятия, и возможное изменение системы электроснабжения глубиной более чем 10-15 лет представляет собой чрезвычайно сложную и нецелесообразную задачу.
Производить изменение системы электроснабжения в эксплуатации, чтобы не нарушать технологического процесса достаточно сложно, а в некоторых случаях невозможно.
Основные трудности при реконструкции электрических сетей являются:
· необходимость изменения положения ГПП,
· необходимость перехода на другой класс напряжений.
Для оптимального выбора местоположения ГПП с учётом развития предприятия, изменения электрических нагрузок следует на генплан промышленного предприятия нанести:
1) зону рассеяния центра нагрузок, которая соответствует состоянию системы на текущий период;
2) зону рассеяния центра нагрузок, соответствующую развитию предприятия на планируемый срок (10-15 лет) без учёта строительства новых цехов, освоения новых территорий;
3) зону рассеяния центра нагрузок, которая соответствует перспективному развитию предприятия и росту нагрузок при условии изменения геометрии генплана предприятия (рис. 8.3).
Нанесение зон рассеяния центров нагрузок на генплан позволяет наметить количество ГПП. Чем больше расстояние между зонами рассеяния, тем больше целесообразность сооружения двух ГПП.

Рис. 8.3. Зоны рассеяния на территории предприятия.
Зр1 – характеризует зону рассеяния электрических нагрузок на текущий период, Зр2 – зона рассеяния нагрузок с учётом изменения потребления электрической энергии без учёта строительства, Зр3 – зона рассеяния с учётом расширения производства.
В некоторых случаях построение в зоне рассеяния центров нагрузок ГПП не представляется возможным (например, в нашем случае). Это может быть обусловлено плотной застройкой территории предприятия, проходящими коммуникациями, особенностью местности (река) и др. В таких случаях строительство подстанции производят наиболее близко к месту расположения зоны рассеяния. В исключительных случаях ГПП размещаются на довольно большом расстоянии от зоны рассеяния, например из-за большой зоны отчуждения вводных ВЛ и при плотной застройке территории, тогда единственный выход, это отказ от глубокого ввода на предприятие, а ГПП построить на границе предприятия. Последний вариант может быть экономически не выгоден, но единственно возможным.
8.6 Увеличение годовых затрат при смещении подстанции из зоны рассеяния центра нагрузок.
Определение зоны рассеяния центра электрических нагрузок не определяет окончательно местоположение ГПП. Смещение подстанции из зоны рассеяния приводит к ухудшению технико-экономических показателей системы электроснабжения. При этом возникает задача оценки такого ухудшения, и на основании этого – окончательного выбора местоположения подстанции.
Для решения данной задачи вся территория проектируемого объекта на генплане разбивается на отдельные зоны, которые можно назвать зонами увеличения расчётных годовых затрат. Если принять hx=hy=h, то эллипс преобразуется в круг, радиус которого определяется выражением:
 , где
, где  (8.16)
(8.16)
Так как зона рассеяния центра нагрузок представляет собой круг, то при определении зон удобнее их представить также в виде кругов с радиусами R1, R2,…Rn .. Это вполне оправдано, так как смещение подстанции на одно и то же расстояние даёт практически одинаковое увеличение приведённых расчётных затрат.
Круг радиуса R1 является кругом рассеяния центра нагрузок и для него выполняется неравенство 0≤∆≤0,05, где ∆ - увеличение приведённых годовых затрат при расположении подстанции вне зоны центра нагрузок.
Для следующей зоны, ограниченной окружностями с радиусами R1 и R2 выполняется неравенство 0,05≤∆≤0,10, то есть увеличение приведённых затрат в этой зоне не превышает 10%, и так далее с шагом 10%.
Получаем для каждой зоны соответствующие неравенства, характеризующие пределы изменения приведённых затрат. Радиусы R являются функцией ∆. Исходя из  для ∆ =0,05 получаем [17]:
для ∆ =0,05 получаем [17]:
 (8.17)
(8.17)
Полученное выражение позволяет определить зону рассеяния центра нагрузок и зоны увеличения приведённых расчётных годовых затрат.
9  Компенсация реактивной мощности.
Компенсация реактивной мощности.
9.1 Коэффициент мощности.
Промышленное предприятие является потребителем активной и реактивной энергии. Основными потребителями реактивной энергии являются асинхронные двигатели, которые составляют подавляющее большинство потребителей на предприятии. Потребителями реактивной мощности являются так же трансформаторы, ВЛ. Электроприёмники, имеющие ёмкостной характер: статические конденсаторы, КЛ являются, в свою очередь, источниками реактивной энергии.
Отношение активной мощности Р ко всей потребляемой мощности предприятия S называется коэффициентом мощности cos φ:
 (9.1)
(9.1)
Коэффициент мощности электротехнической установки без применения специальных средств к его повышению носит название естественного, и составляет для большинства предприятий 0,6-0,8.
Генераторы для обеспечения электроэнергией предприятия рассчитываются для работы с их номинальным коэффициентом мощности не ниже 0,8, при котором они способны выдавать номинальную активную мощность. Снижение коэффициента мощности у потребителей ниже этого значения может привести к тому, что выдаваемая генераторами мощность будет меньше номинальной при той же полной мощности. Поэтому, при низких коэффициентах мощности у потребителя для обеспечения передачи активной мощности необходимо сооружать либо более мощные электростанции, либо принимать меры для увеличения cos φ.
При протекании в электрических сетях реактивной мощности, последняя обуславливает добавочные потери активной мощности и дополнительные потери напряжения ∆U:
 , (9.2)
, (9.2)
где R и Х – активное и реактивное сопротивление сети.
Потери активной мощности при этом:
 (9.3)
(9.3)
Для повышения напряжения у потребителя и уменьшения потерь следует стремиться к уменьшению передаваемой реактивной мощности. Это достигается повышением коэффициента мощности за счёт:
· рационализации работы электрооборудования или естественная компенсация электроприёмников;
· компенсация реактивной мощности.
9.2 Естественная компенсация реактивной мощности.
Естественная компенсация реактивной мощности не требует больших материальных затрат. Одним из основных условий рационального электроснабжения предприятия является соответствие мощностей электродвигателей и потребляемым мощностям механизмов, приводимых этими электродвигателями в движение.
К естественной компенсации реактивной мощности относятся:
· упорядочение технологического процесса, ведущее к выравниванию графика нагрузок (равномерное распределение нагрузок по фазам, смещение обеденного времени для разных цехов и др.),
· создание рациональной системы электроснабжения за счёт уменьшения количества ступеней трансформации,
· замена трансформаторов старой конструкции на новую с меньшими потерями на перемагничивание,
· замена малозагруженных трансформаторов и двигателей трансформаторами и двигателями меньшей мощности и их полная загрузка,
· ограничение продолжительности режима холостого хода электродвигателей,
· отключение части силовых трансформаторов при малой загрузке (например, в выходные дни),
· замена асинхронных двигателей синхронными, поскольку синхронные двигатели при перевозбуждении могут работать с коэффициентом мощности, близким к единице, и даже выдавать реактивную мощность в сеть.
9.3 Компенсация реактивной мощности.
Благодаря естественной компенсации реактивной мощности можно лишь частично разгрузить систему электроснабжения от реактивной мощности. В большинстве случаев естественной компенсации реактивной мощности не достаточно для повышения коэффициента мощности до требуемого значения. Поэтому, для обеспечения работы генераторов с номинальными параметрами и для разгрузки сети от реактивной мощности целесообразно часть этой мощности генерировать на месте её потребления. Такая компенсация называется «поперечной».
Основными источниками реактивной мощности, устанавливаемыми на месте потребления являются синхронные компенсаторы и конденсаторные батареи. Наиболее широко используются статические конденсаторы на напряжение до 1000В и 6-10кВ. В случаях, когда компенсирующие устройства остаются подключенными к сети, а потребители реактивной мощности отключаются от неё, происходит перекомпенсация. Результатом этого является увеличение суммарных потерь мощности и усложнение устройств регулирования напряжения. Поэтому нашли применение управляемые компенсирующие устройства на основе полупроводниковых приборов.

Рис. 9.1 Схемы без компенсации (а) и с компенсацией (б) реактивной мощности и их векторные диаграммы.
Наглядное представление о сущности компенсации реактивной мощности даёт рис. 9.1. До компенсации потребитель имел активную мощность Р, соответственно ток Ir и реактивную мощность от реактивной нагрузки Q c соответствующим током Ix. Полной мощности соответствует вектор Iн. Коэффициент мощности до компенсации cosφ1.
После компенсации, то есть после подключения параллельно нагрузке конденсатора с мощностью Qc суммарная реактивная мощность потребителя будет Q-Qc (ток Ix-Ic). Угол φ уменьшится, и коэффициент мощности повысится с cosφ1 до cosφ2. Полная потребляемая мощность при той же активной мощности снизится с S1 (ток Iн) до S2 (ток I2). Поэтому при том же сечении можно повысить пропускную способность линии по активной мощности.
В идеале необходимо проводить полную компенсацию, когда Q=Qc, но в реальности такая ситуация недостижима из-за постоянно меняющейся конфигурации сети, изменения режима работы приёмников и т.п.
При компенсации реактивной мощности уменьшаются и потери напряжения в электропередачах. Если до компенсации потеря напряжения определялась выражением (9.2), то при наличии компенсации мы будем иметь:
 (9.4)
(9.4)
Как уже отмечалось, компенсацию реактивной мощности производят с помощью конденсаторных батарей, которые получили наибольшее распространение. Широкое распространение конденсаторных батарей объясняется их преимуществами: незначительные удельные потери активной мощности, отсутствие вращающихся частей, простота монтажа, относительно невысокие массогабаритные и стоимостные показатели, отсутствие шума во время работы и др. Однако существуют и недостатки: пожароопасность, наличие остаточного заряда, который необходимо снимать, чувствительность к перенапряжениям, потребность в специальных условиях утилизации отработавших батарей.
В сетях с резкопеременной ударной нагрузкой, а так же для плавной регулировки уровня компенсации рекомендуется применение комбинированных быстродействующих источников реактивной мощности (рис. 9.2). Регулирование индуктивности в данном случае осуществляется тиристорами VS.
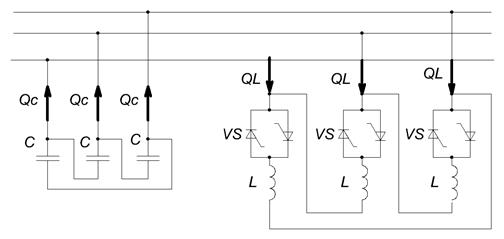
Рис. 9.2 Принципиальная схема быстродействующего компенсирующего устройства.
Другим техническим средством компенсации реактивной мощности, которое получило распространение, является синхронный компенсатор. Он представляет собой синхронный двигатель без нагрузки на валу. Он может работать как в режиме генерирования реактивной мощности, так и режиме её потребления. Изменение генерируемой или потребляемой реактивной мощности компенсатора осуществляется регулированием его возбуждения.
Достоинством синхронного компенсатора, как источника реактивной мощности является возможность плавного регулирования генерируемой реактивной мощности и высокая стойкость в режимах короткого замыкания и перенапряжения.
Основным отличием синхронного двигателя от асинхронного является то, что магнитное поле, необходимое для действия двигателя, создаётся в основном от отдельного источника постоянного тока (возбудителя). Вследствие этого в нормальном режиме синхронный двигатель почти не потребляет из сети реактивной мощности, необходимой для создания главного магнитного потока, а в режиме перевозбуждения (при опережающем коэффициентом мощности) может генерировать реактивную мощность в сеть.
Синхронные двигатели могут вырабатывать реактивную мощность при напряжении Uном:
Q=0,5Pном (9.5)
Одним из недостатков синхронных двигателей является дополнительные активные потери в обмотке, вызываемые генерируемой реактивной мощностью:
 , (9.6)
, (9.6)
Где Qном – номинальная реактивная мощность, r – cопротивление одной фазы обмотки двигателя.
9.4 Выбор компенсирующих устройств.
При выборе компенсирующего устройства основным вопросом является выбор мощности компенсирующего устройства. При выборе мощности компенсирующего устройства стремятся к правильному распределению источников реактивной мощности и наиболее экономичной загрузке сети.
Требуемая мощность компенсирующего устройства выбирается с учётом наибольшей реактивной мощности Qэ, которая может быть передана из сетей энергосистемы. Должно соблюдаться условие:
 , (9.7)
, (9.7)
где Qр – расчётная потребляемая предприятием реактивная мощность, Qk – реактивная мощность, которая должна быть скомпенсирована на предприятии.
На предприятии задаётся режим потребления реактивной мощности с учётом его максимальных нагрузок. Это требование заключается в том, что задаются значения Qэ1 – реактивной мощности, выдаваемой энергосистемой предприятию в течении получаса в период максимальных активных нагрузок системы, и Qэ2 – средней реактивной мощности, передаваемой из сети энергосистемы или генерируемой в сеть в период её наименьшей нагрузки. Поэтому можно записать:
Qk max=Qp max-Qэ1 и (9.8)
Qk min=Qp min-Qэ2, (9.9)
где Qk max, Qk min необходимые мощности компенсирующего устройства в режиме максимальных и минимальных нагрузок, Qp max, Qp min – расчётная реактивная мощность предприятия в режиме максимальных и минимальных нагрузок.
Таким образом, недостаток в энергосистеме реактивной энергии для покрытия реактивных нагрузок предприятия устраняется за счёт компенсирующих устройств предприятия.
Для того, чтобы стимулировать предприятие на внедрение мероприятий по компенсации реактивной мощности введена система оплаты за электроэнергию и по потребляемой реактивной мощности.
Выбор мощности компенсирующих устройств и распределение их по сетям предприятия производят на основании технико-экономических затрат. Приведённые затраты на компенсацию реактивной мощности:
Зк=З0к+Зу,к1Qк+Зу,к2Qк2, (9.10)
Не нашли, что искали? Воспользуйтесь поиском: