ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Колебательные движения тела человека при ходьбе.
Лекция 1 БИОМЕХАНИКА
Введение
Как самостоятельная отрасль науки биофизика оформилась в 1961 г. в соответствии с решением 1 Международного биофизического конгресса. Согласно классификации, принятой этим конгрессом, биофизика включает четыре раздела.
Молекулярная биофизика, которая рассматривает строение и физические свойства биологических макромолекул (белков, нуклеиновых кислот и др.) и молекулярных комплексов, составляющих основу живых организмов, а также происходящие в этих системах превращения и миграцию энергии.
Биофизика клетки исследует структуру клетки и ее органелл, происходящие в них физико-химические процессы, проявления физико-химической активности клетки, ее электрические свойства, клеточную энергетику и термодинамику.
Биофизика органов чувств изучает механизмы перехода энергии внешних раздражителей в электрические импульсы в рецепторах и кодирование этих импульсов с целью передачи информации.
Биофизика сложных систем занимается изучением и моделированием внутренних связей в биологических.объектах на всех уровнях, от молекулярного до экологического, а также проблемами регулирования и саморегулирования этих объектов.
Сюда же иногда относят биомеханику, исследующую механизмы работы органов кровообращения, дыхания и движения. Помимо этого, к биофизике традиционно относят и такие проблемы, как влияние физических факторов на живой организм (шума, электромагнитных полей, ионизирующих излучений и пр.). Некоторые проблемы послужили основой для создания новых разделов науки. Так, биологическое действие ионизирующих излучений стало предметом исследования радиобиологии.
Перевод современного животноводства на индустриальные рельсы поставил перед ветеринарными специалистами много новых проблем. Дело в том, что животноводческие и птицеводческие производственные комплексы оснащены множеством механизмов и аппаратов, которые, с одной стороны, повышают эффективность производства, а с другой стороны, отрицательно сказываются на жизнедеятельности и продуктивности животных и птицы, находящихся в условиях, значительно отличающихся oт природных. Выявление объективной роли физиологического действия гиподинамии, искусственного освещения, вибраций, производственных шумов, электромагнитных полей возможно только с помощью ветеринарных врачей, вооруженных знаниями физики и биофизики.
Использование современных физических методов в клинической ветеринарии позволяет усовершенствовать диагностику, профилактику и лечение сельскохозяйственных животных и птицы и тем самым способствовать повышению их продуктивности. Взаимодействие физики с биологией привело к созданию большого арсенала технических средств, используемых в лабораторной и клинической ветеринарии. На вооружение ветеринарных врачей поступает новейшая диагностическая и исследовательская аппаратура, источники лазерного излучения, приборы для автоматической регистрации физиологических процессов в организме животных и многое другое. Можно с уверенностью сказать, что в настоящее время нет такой области ветеринарии, которая не пользовалась бы физическими приборами и не применяла бы физических и биофизических методов для диагностики и лечения.
Предмет науки – совокупность объектов или процессов, которые изучает данная наука.
Биомеханика двигательных действий изучает свойства и функции опорно-двигательного аппарата и двигательные действия человека с позиции классической механики (на основе понятий, принципов и законов классической механики).
Движения живых существ интересовали человека с давних времен. Однако отсутствие научных методов их изучения ограничивало возможность оценить значение механизмов, лежащих в основе движений. Тем не менее, такие ученые, как Аристотель, Клавдий Гален, Леонардо да Винчи, заложили основы науки о движениях человека и животных.
Аристотель (384-322 до н.э.) – выдающийся греческий ученый, мыслитель, описал разные типы походок, пытаясь понять, какие силы действуют на человека при ходьбе. Он может считаться первым биомехаником, так как написал трактат: «De Motu Animalium» – «Движения животных».
Велик вклад в изучение функций о механике локомоций организма человека КлавдияГалена (129 – 201 г.г. н.э.) – анатома, врача и естествоиспытателя, который считается классиком античной медицины. Клавдий Гален был врачом римского императора Марка Аврелия и написал более 400 трактатов по медицине, среди которых есть труд о функциях человеческого тела. Гален опровергал мнение Аристотеля о мозге как о железе, выделяющей слизь для охлаждения теплоты сердца. Он считал, что мозг является средоточием движения, чувствительности и душевной деятельности.
В развитии биомеханики особенно велика роль Леонардо да Винчи (1452 – 1519) – выдающегося итальянского живописца, скульптора, архитектора, учёного и инженера. Как художник, Леонардо да Винчи большое внимание уделял изучению анатомии, особенно пропорций человеческого тела. Сохранилось огромное количество рисунков Леонардо да Винчи, посвященных исследованию расположения мышц и внутренних органов
Большой вклад в развитие биомеханики как науки внес итальянский астроном, математик и врач Джованни Альфонсо Борелли (1608-1679), который так же, как и Леонардо да Винчи, рассматривал мышцы и опорно-двигательный аппарат животных и человека с позиций механики.
Он рассмотрел с точки зрения механики условия равновесия человеческого тела, дал определение общего центра тяжести на основе экспериментальных данных.
Следует отметить, что математический аппарат того времени более всего был приспособлен для изучения статических положений человека, так как знаменитая книга Исаака Ньютона «Математические начала натуральной философии», в которой были заложены основы дифференциального и интегрального исчислений, была опубликована в 1686 году, через семь лет после смерти Борелли.
Последующее развитие биомеханики как науки связано с трудами немецких ученых братьев Эдуарда и Вильгельма Веберов. Эдуард Вебер был анатомом, а Вильгельм – физиком. В 1836 году они издали книгу «Mechanik der menschlichen Gehwerkzeuge» – «Механика ходьбы человека». В этой книге они привели данные о кинематических характеристиках ходьбы человека.
Однако несовершенство используемых методик не позволило провести анализ быстротекущих двигательных действий.
В биомеханике мышц до сих пор справедлив принцип, впервые сформулированный Э. Вебером: «С ила мышц, при прочих равных условиях, пропорциональна ее поперечному сечению».
Проникновение в биомеханику подлинно научных методов исследования связано с французским изобретателем Жаком Луи Дагером (1787 – 1851). В 1839 году им был разработан первый практический способ фотографии.
Дальнейший шаг по внедрению научных методов исследования в биомеханику был сделан французским физиологом Этьеном-Жюлем Маре (1830-1904).
Э.Ж. Маре разработал метод пневмографии – записи опорных реакций с помощью передачи давления воздуха. В подошвы ботинка человека встраивались воздушные камеры. Во время опоры давление воздуха в камере повышалось, оно передавалось по трубочкам на прибор, который испытуемый держал в руке (рис. 2.5).
 Это позволило определить длительность периодов опоры и полета при ходьбе и беге. Более серьезным изобретением Э.Ж. Маре является силовая платформа, позволяющая регистрировать величину реакции опоры при отталкивании. В 1872 году американский фотограф Эдвард Майбридж (1830-1904), поставив в ряд несколько фотоаппаратов, получил моментальные снимки последовательных фаз движения человека и животных (рис. 2.6).
Это позволило определить длительность периодов опоры и полета при ходьбе и беге. Более серьезным изобретением Э.Ж. Маре является силовая платформа, позволяющая регистрировать величину реакции опоры при отталкивании. В 1872 году американский фотограф Эдвард Майбридж (1830-1904), поставив в ряд несколько фотоаппаратов, получил моментальные снимки последовательных фаз движения человека и животных (рис. 2.6).
Значительный след в развитии биомеханики оставили отечественные ученые: Петр Францевич Лесгафт (1837 – 1909) – известный анатом, педагог, основавший высшее учебное заведение, которое носит теперь его имя (СПбГУФК им. П.Ф. Лесгафта). В своем труде «Основы теоретической анатомии», первое издание которого датируется 1892 годом, П.Ф. Лесгафт рассмотрел ряд проблем, смежных с биомеханикой: механические свойства биологических тканей; особенности строения и соединения костей в зависимости от действующих на них сил.
Иван Михайлович Сеченов (1829-1905) – известный русский физиолог, окончил медицинский факультет Московского университета, получил также хорошее техническое образование в артиллерийском училище. Это позволило ему, кроме исследований по физиологии, внести солидный вклад в биомеханику рабочих движений.
В 1901 он издал книгу «Очерк рабочих движений человека», в которой подробно рассмотрел следующие вопросы: работу опорно-двигательного аппарата (ОДА) как рабочей машины (формы суставов, плечи сил тяги мышц); механику мышечного сокращения (факторы, определяющие силу мышцы); биомеханические свойства мышцы (в частности, упругие свойства мышцы); функции верхней и нижней конечностей человека как рабочей машины. Кроме этого, детальному биомеханическому анализу были подвергнуты некоторые физические упражнения.
Работа профессора Ленинградского университета, академика Алексея Алексеевича Ухтомского (1875 – 1942) «Физиология двигательного аппарата» была издана в 1927 году. В предисловии к этой книге А.А. Ухтомский писал: «…Построив вычислительную науку о движении и механизмах, человек возвращается к собственной мускулатуре с новой задачей – переработать свои сведения о ней по образцу учения о внешних механизмах».
Николай Александрович Бернштейн (1896 – 1966) – выдающийся русский физиолог и биомеханик, много времени посвятил изучению биомеханики спортивных и трудовых движений.
В начале 20-х годов XX века он, используя методику циклосъемки, получил огромный фактический материал по кинематике и динамике ходьбы, бега и прыжка.
Большой вклад в изучение механизмов мышечного сокращения внес английский физиологАрчибалд Вивиен Хилл (1886-1977). В 1923 году он получил Нобелевскую премию по физиологии и медицине «За открытия в области теплообразования в мышце». Будучи по образованию математиком (закончил Кембриджский Университет), Арчибалд Хилл предложил описание зависимости скорости укорочения мышцы от значений внешней нагрузки (характеристическое уравнение Хилла).
Биомеханика – смежная наука. Она возникла на «стыке» двух наук: биологии – науки о жизни и механики – науки о механическом движении материальных тел и происходящих при этом взаимодействиях между телами.
За время своего развития классическая механика выработала широкий круг понятий, которые в настоящее время используются в биомеханике: перемещения, скорости и ускорения тела; силы, импульса силы, работы, мощности, энергии, ОЦТ (ОЦМ) и др.
Например, под скоростью тела понимается отношение пути (перемещения), пройденного телом ко времени за который этот путь пройден. В биомеханике изучаются скорости движения звеньев опорно-двигательного аппарата, а также скорость сокращения мышц человека. Одним из центральных в механике является понятие силы как количественной меры механического взаимодействия тел. В биомеханике двигательных действий анализируются силы, действующие на человека, а также силы, возникающие в его опорно-двигательном аппарате, например, силы тяги мышц, силы трения в суставах.
Кроме круга понятий в рамках классической механики установлены принципы (принцип относительности Галилея, принцип Д’Аламбера, принцип возможных перемещений) и законы движения материальных тел (законы Ньютона, законы сохранения энергии, количества движения (импульса) и другие.
На основе принципа Д’Аламбера и принципа возможных перемещений задачи динамики перемещения человека могут быть сведены к задачам статики.
В биомеханике на основе законов механики анализируются двигательные действия человека. Так, например третий закон Ньютона гласит: «Силы, с которыми действуют друг на друга два тела, всегда равны и направлены по одной прямой в противоположные стороны», рис.1.1. Этот закон проявляется, например, при ударе по мячу: рука ударяет по мячу, а сила противодействия со стороны мяча действует на руку, рис.1.2.
Биомеханический анализ движений человека всегда начинается с определения различных характеристик движущегося тела. Этими характеристиками могут быть различные механические характеристики (например, перемещение, скорость, ускорение) и биологические характеристики (сила тяги мышцы, время суммарной электрической активности мышцы).
В биомеханике широко используются механические характеристики движущегося тела. Прежде чем перейти к описанию механических характеристик введем ряд понятий, характеризующих механическое движение тел.
Биомеханика и координация движений
Сокращение мышц связано с преобразованием химической энергии в механическую работу. Если мышца, сократившись, в состоянии напряжения удерживает груз, такая работа называется статической (например сидения, стояния). Если сокращение мышцы чередуется с его расслаблением и при этом тело человека или его отдельные органы перемещаются в пространстве, то в этом случае работа называется динамической.
Перемещение тела в пространстве связано с движением его скелета, который приводится в действие активной частью опорно-двигательного аппарата — мышцами. Мышца представляет собой вязкое эластичное тело, при его растяжении возбуждаются рецепторы, которые посылают импульсы в центральную нервную систему, а возвращаясь в мышцу, они противодействуют его растяжению.
Движения костей подчинены законам механики, и их можно рассматривать как движения рычагов. В каждом рычаги плечи. К одному из них прикладывается сила массы тела, во второй — сила мышечной тяги. Поэтому первое плечо получило название плеча силы массы тела, а второе — силы мышечной тяги.
Как и в механике, в живом организме мы наблюдаем рычаги первого и второго рода.
Рычаги первого рода двуплечий, сила массы тела и сила мышечной тяги направлены в одну сторону (вниз). Примером рычага первого рода может служить соединения головы с позвоночником в атлантопотиличному суставе. Плечи рычага расположены по обе стороны от сустава. На переднее плечо рычага действует сила тяжести лицевой части головы, а на заднее — сила мышц шеи, головы, спины, которые прикрепляются к затылочной кости. Голова находится в вертикальном положении (равновесии) благодаря равенству моментов силы массы тела и силы мышечной тяги рычага (черепа). Фактически сила затылочных мышц и уравновешивает массу головы. Поэтому рычаг первого рода называют рычагом равновесия, или покоя. Примером рычага равновесия может служить и таз, который балансирует на головках бедренных костей.
Рычаг второго рода тоже двуплечий, но в нем сила массы тела действует вниз, а сила мышечной массы — вверх. Примером такого рычага может служить предплечье. Напряжением двуглавой мышцы (сила мышечной тяги), который прикрепляется у локтевого сустава (точки опоры), достигается преодолением силы массы предплечья, и работа выполняется с большой скоростью, поэтому этот рычаг еще называют рычагом скорости. Примером рычага второго рода также может служить стопа, когда человек поднимается на цыпочки. В этом случае рычагом является вся стопа. Точка опоры — головки плюсневых костей, точка приложения силы мышечной тяги — пяточный бугор, к которому пяточным (ахилловым) сухожилием прикрепляется трехглавая мышца голени. Он же и поднимает всю массу тела вверх. В этом примере, как и в предыдущем, обе силы действуют в разных направлениях, но, в отличие от рычага скорости, здесь плечо силы мышечной тяги будет длиннее, чем плечо силы массы. Поэтому этот рычаг принято называть рычагом силы.
Характеристика положений или движений тела с позиции законов биомеханики необходима для понимания работы опорно-двигательного аппарата. Для этого нужны знания не только о работе рычагов как отдельных цепей тела, но и воздействие на тело других внешних сил. Наибольшее значение для анатомической характеристики положений тела или движений человека имеют сила тяжести, сила реакции опоры, сила инерции, сила трения и сила сопротивления среды.
Сила тяжести (или гравитация) равна массе тела, приложенной в месте расположения общего центра массы (ЗЦМ) и направлена вниз.
Сила реакции опоры — это сила, равная массе тела, но действует в противоположном направлении. До тех пор, пока сила тяжести и сила реакции опоры уравновешенные, тело будет находиться в равновесии.Если сила тяжести больше силы реакции опоры, тело падает, а когда сила реакции опоры больше силы массы тела, оно откидываться от площади опоры (например прыжки на батуте).
Сила реакции опоры при ходьбе, прыжках, беге направлена к телу под углом, в результате чего она разлагается по правилу параллелограмма на две составляющие: вертикальную и горизонтальную. Вертикальная составляющая силы реакции опоры направлена вверх и взаимодействует с силой тяжести, а горизонтальная (сила трения) влияет на перемещение тела; она или облегчает движение тела, или, наоборот, тормозит.
Сила сопротивления среды действует на тело при движении его в различных средах (воздушное, водное).Эта сила зависит от площади лобовой поверхности сопротивления тела, скорости и плотности внешней среды. При уменьшении лобовой поверхности (например, езда на велосипеде с низкой посадкой) сопротивление среды уменьшается.
К внутренним силам относят силу тяги мышц, которая будет тем больше, чем сильнее сокращается, напрягается мышца.
Мышечная координация, например сокращение мышц передней поверхности плеча, вызывает расслабление мышц-антагонистов, лежащие на задней поверхности плеча, а также пассивное сопротивление тканей, который осуществляют связи и суставные сумки, вязкость мышц, сила инерции и др. Тело человека, как и каждое физическое тело, находится в состоянии равновесия, когда центр массы тела расположен так, что перпендикуляр, опущенный от центра массы до опоры, падает в пределах опоры. Когда линия от центра массы тела выходит за пределы опоры, тело или падает, или начинает двигаться. Тело падающего содержится напряжением мышц, если же их сила недостаточна, тело падает.
Центр массы человеческого тела есть точка приложения равнодействующей всех сил массы отдельных частей тела — головы, туловища, конечностей. Центр массы содержится на уровне II крестцового позвонка, немного выше симфиза лобковых костей и равна 5-10 мм. У мужчин центр массы на 1-2 см выше, чем у женщин того же роста. Центр массы не может оставаться постоянно на одном месте. Он смещается в зависимости от возраста человека, пола, массы тела и др. В течение суток центр массы также смещается. Это зависит от функционального состояния сердечно-сосудистой, пищеварительной, дыхательной систем, а также от положения тела в пространстве.
Лекция 2
2.1. Колебания.
Колебаниями называют процессы, отличающиеся той или иной степенью повторяемости. Колебания являются процессами, повторяющимися через одинаковые промежутки времени (при этом далеко не все повторяющиеся процессы являются колебаниями).
В зависимости от физической природы повторяющегося процесса различают колебания механические, электромагнитные, электромеханические и т.п. При механических колебаниях периодически изменяются положения и координаты тел. При электрических – напряжение и сила тока.
В зависимости от характера воздействия на колеблющуюся систему различают свободные колебания, вынужденные, автоколебания и параметрические колебания.
Повторяющиеся процессы непрерывно происходят внутри любого живого организма, например: сокращения сердца, работа легких; мы дрожим, когда нам холодно; мы слышим и разговариваем благодаря колебаниям барабанных перепонок и голосовых связок; при ходьбе наши ноги совершают колебательные движения. Колеблются атомы, из которых мы состоим. Мир, в котором мы живем, склонен к колебаниям.
2.2 Периодические колебания.
Периодическими называют такие колебания, при которых все характеристики движения повторяются через определенный промежуток времени.
Для периодических колебаний используют следующие характеристики: • период колебаний Т, равный времени, в течение которого совершается одно полное колебание; • частота колебаний ν, равная числу колебаний, совершаемых за одну секунду (ν = 1/Т); Параметрические колебания осуществляются при периодическом изменении параметров колеблющейся системы (качающийся на качелях человек периодически поднимает и опускает свой центр тяжести, тем самым меняя параметры системы).
При определенных условиях система становится неустойчивой - случайно возникшее отклонение из положения равновесия приводит к возникновению и нарастанию колебаний. Это явление называется параметрическим возбуждением колебаний (т.е. колебания возбуждаются за счет изменения параметров системы), а сами колебания – параметрическими.
Несмотря на разную физическую природу, для колебаний характерны одни и те же закономерности, которые исследуются общими методами.
Важной кинематической характеристикой является форма колебаний. Она определяется видом той функции времени, которая описывает изменение той или иной физической величины при колебаниях. Наиболее важными являются такие колебания, при которых колеблющаяся величина изменяется со временем по закону синуса или косинуса. Они называются гармоническими. Этот вид колебаний особенно важен по следующим причинам. Во-первых, колебания в природе и в технике часто имеют характер очень близких к гармоническим. Во-вторых, периодические процессы иной формы (с другой зависимостью от времени) могут быть представлены как наложение, или суперпозиция, гармонических колебаний.
2.3 Гармонические колебания. Гармонический осциллятор
Особое место среди периодических колебаний занимают гармонические колебания. Их значимость обусловлена следующими причинами. Во-первых, колебания в природе и в технике часто имеют характер, очень близкий к гармоническому, и, во-вторых, периодические процессы иной формы (с другой зависимостью от времени) могут быть представлены как наложение нескольких гармонических колебаний.
Гармонические колебания - это колебания, при которых наблюдаемая величина изменяется во времени по закону синуса или косинуса: В математике функции этого вида называют гармоническими, поэтому колебания, описываемые такими функциями, тоже называют гармоническими.
Положение тела, совершающего колебательное движение, характеризуется смещением относительно равновесного положения. В этом случае величины, входящие в формулу (1.1), имеют следующий смысл: х - смещение тела в момент времени t; А - амплитуда колебаний, равная максимальному смещению; ω - круговая частота колебаний (число колебаний, совершаемых за 2π секунд), связанная с частотой колебаний соотношением: φ = (ωt +φ0) - фаза колебаний (в момент времени t); φ0 -начальная фаза колебаний (при t = 0). Рис. Графики зависимости смещения от времени для х(0) = А и х(0) = 0
2.4 Свободные колебания.
Свободными или собственными называются такие колебания, которые происходят в системе, предоставленной самой себе, после того как она была выведена из положения равновесия. Примером могут служить колебания шарика, подвешенного на нити. Для того чтобы вызвать колебания, нужно либо толкнуть шарик, либо, отведя в сторону, отпустить его. При толчке шарику сообщается кинетическая энергия, а при отклонении сообщается потенциальная энергия. Свободные колебания совершаются за счет первоначального запаса энергии.
Свободные колебания могут быть незатухающими только при отсутствии силы трения. В противном случае первоначальный запас энергии будет расходоваться на ее преодоление, и размах колебаний будет уменьшаться. В качестве примера рассмотрим колебания тела, подвешенного на невесомой пружине, возникающие после того, как тело отклонили вниз, а затем отпустили.
Колебания тела на пружине Математический маятник - небольшое тело (материальная точка), подвешенное на невесомой нити. Если нить отклонить от положения равновесия на небольшой (до 5°) угол α и отпустить, то тело будет совершать колебания с периодом, определяемым по формуле где L - длина нити, g - ускорение свободного падения.
2.6. Вынужденные колебания, резонанс
Свободные колебания при наличии сил трения являются затухающими. Незатухающие колебания можно создать с помощью периодического внешнего воздействия. Вынужденными называются такие колебания, в процессе которых колеблющаяся система подвергается воздействию внешней периодической силы (ее называют вынуждающей силой).
Резонансом называется достижение максимальной амплитуды вынужденных колебаний при определенном значении частоты вынуждающей силы.
Автоколебания, как и вынужденные колебания, сопровождаются воздействием на колеблющуюся систему внешних сил, однако, моменты времени, когда осуществляются эти воздействия, задаются самой колеблющейся системой. То есть система сама управляет внешним воздействием. Примером автоколебательной системы являются часы, в которых маятник получает толчки за счет энергии поднятой гири или закрученной пружины, причем эти толчки происходят в моменты прохождения маятника через среднее положение.
Автоколебания - это незатухающие колебания, которые могут существовать в какой-либо системе при отсутствии переменного внешнего воздействия, причём амплитуда и период колебаний определяются свойствами самой системы. Этим автоколебания отличаются от вынужденных колебаний, амплитуда и период которых определяются характером внешнего воздействия (приставка «авто» и указывает на то, что колебания возникают в самой системе, а не навязываются внешним воздействием).
Автоколебания отличаются и от свободных колебаний (например, колебаний свободно подвешенного маятника, колебаний силы тока в электрическом контуре) тем, что, во-первых, свободные колебания постепенно затухают, во-вторых, их амплитуда зависит от первоначального «толчка», создающего эти колебания.
Примерами автоколебаний могут служить колебания, совершаемые маятником часов, колебания струны в смычковых или столба воздуха в духовых музыкальных инструментах, электрические колебания в ламповом генераторе. Системы, в которых возникают автоколебания, называются автоколебательными.
Колебательные движения тела человека при ходьбе.
Ходьба - это сложный периодический локомоторный процесс, возникающий в результате координированной деятельности скелетных мышц туловища и конечностей. Aнализ процесса ходьбы дает много диагностических признаков.
Характерной особенностью ходьбы является периодичность опорного положения одной ногой (период одиночной опоры) или двух ног (период двойной опоры).
В норме соотношение этих периодов равно 4:1. При ходьбе происходит периодическое смещение центра масс (ЦМ) по вертикальной оси (в норме на 5 см) и отклонение в сторону (в норме на 2,5 см).
При этом ЦМ совершает движение по кривой, которую приближенно можно представить гармонической функцией.
Движения нижних конечностей во время ходьбы проявляются обязательным колебанием таза. Благодаря телеметрии теперь возможно точно изучить траектории движения тела во время ходьбы, в частности таза и главного центра тяжести.
 Таз колеблется в двух плоскостях (рис. 23, график в трех измерениях в объемном параллелепипеде) и кривые представляют собой составляющие движения центра тяжести:
Таз колеблется в двух плоскостях (рис. 23, график в трех измерениях в объемном параллелепипеде) и кривые представляют собой составляющие движения центра тяжести:
Боковые колебания (синяя кривая) в горизонтальной плоскости;
Вертикальные колебания (красная кривая) в сагиттальной плоскости.
Для наглядности эти кривые были изображены в объемном параллелепипеде, включающем в себя две плоскости: горизонтальную (светло-желтого цвета) и вертикальную (голубого цвета):
В горизонтальной плоскости при каждом полушаге таз перемещается в сторону несущей ноги на 2-2,5 см, что представляет собой колебательное движение с общей амплитудой целого шага в 4-5 см (синяя кривая);
В вертикальной плоскости таз находится на максимальной высоте при переходе несущей ноги в вертикальное положение, и на минимальной высоте - в колебательную фазу. Таким образом, для каждого полушага есть свой минимум и максимум. Это означает, что в вертикальной плоскости частота колебаний удваивается по сравнению с горизонтальной плоскостью;
Вертикальная амплитуда этой кривой составляет 5 см между наивысшей и низшей точками.
Если попытаться создать реальную кривую движений центра тяжести (рис. 24), учитывая две составляющие - горизонтальную и вертикальную, - мы получим результирующую (темно-синего цвета), показанную на том же рисунке.
Можно попытаться представить в пространстве колебания таза:
Сначала в вертикальной плоскости (рис. 25): в левой части рисунка показаны колебания таза во время полного шага, но чтобы лучше представить себе эти волны, обратимся к правой части рисунка, где фигурируют колебания при двух полных шагах с удаленным каждым третьим положением;
Затем, в горизонтальной плоскости (рис. 26), рисунок становится понятнее, поскольку колебания здесь представлены в два раза реже. Таз показан в трех положениях: правый шаг d, левый шаг g, правый шаг d.
Это не показывает общей картины движений таза, поскольку, несмотря на свои перемещения в горизонтальной и вертикальной плоскости, он также претерпевает два типа вращений: одно - по вертикальной оси, другое - по переднезадней оси.
Бег, как и ходьба, относится к циклическим движениям, где цикл движения включает двойной шаг. Вместо периода двойной опоры в ходьбе, в беге имеется период полета. В беге можно выделить: а) период одиночной опоры; б) период полета; в) период переноса маховой ноги, который совпадает с периодом опоры. Быстрота, амплитуда движений, проявление больших мышечных усилий в беге зависят от скорости бега (чем выше скорость, тем выше значения перечисленных факторов).
Период переноса маховой ноги (левой) и период опоры толчковой ноги (правой) совпадают по времени, затем наступает период полета, далее период переноса маховой ноги (правой) и период опоры толчковой ноги (левой), затем опять период полета. Так выглядит цикл движения в беге (рис. 23).
Основа бега
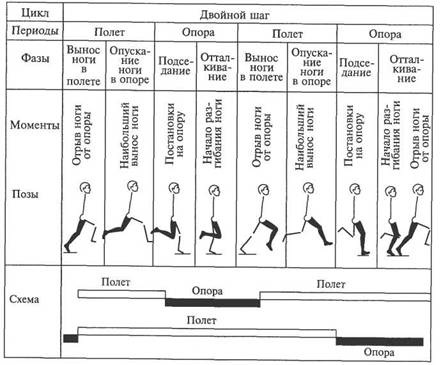
Рис. 23. Периоды и фазы движений двойного шага в беге
В беге, как и в ходьбе, руки и ноги выполняют согласованные перекрестные движения. Встречные перекрестные движения осей таза и плеч позволяют сохранить равновесие и противодействуют боковому развороту тела бегуна.
В периоде опоры в беге, так же, как и в ходьбе, две фазы:
1) фаза амортизации;
2) фаза отталкивания.
Фаза амортизации начинается с момента постановки ноги на опору и длится до момента вертикали, когда проекция ОЦМ находится над точкой опоры. В отличие от ходьбы в этой фазе происходит значительное снижение ОЦМ за счет разгибания в голеностопном суставе, сгибания в коленном суставе и наклона поперечной оси таза в сторону маховой ноги.
Одновременно с этим происходит растягивание упругих компонентов (связки, сухожилия, фасции), участвующих в последующем отталкивании. За мгновение до соприкосновения с опорой (15–25 миллисекунд) мышцы, участвующие в фазе амортизации, уже становятся электрически активными, т. е. импульсы возбуждения приходят к мышце заранее, до опоры, и растягиваются напряженные мышцы.
С момента вертикали до момента отрыва толчковой ноги от опоры длится фаза отталкивания. Она начинается с распрямления толчковой ноги в тазобедренном, коленном суставах и завершается сгибанием в голеностопном суставе. С начала фазы амортизации увеличивается сила давления на опору, которая продолжает увеличиваться и после прохождения вертикали до определенного момента за счет мышечных усилий, которые разгибают тазобедренный и коленный суставы. Сила реакции опоры также увеличивается, как и сила давления на опору, только они действуют диаметрально противоположно друг другу. Телу бегуна и его ОЦМ придается определенная скорость. Надо сказать, что в конце фазы отталкивания силы давления и реакции опоры уменьшаются (примерно после выпрямления ноги в коленном суставе), и мышцы, участвующие в сгибании голеностопного сустава, выполняют скоростную работу с меньшими усилиями, но с большей скоростью. Выглядит это так: сначала ягодичные мышцы более сильные, но менее скоростные, придают начальную скорость движению, затем мышцы передней поверхности бедра менее сильные, но более скоростные, придают ускорение телу, и в конце действуют более скоростные, но относительно слабые мышцы (икроножные). Сила и скорость проявления мышечных усилий обратно пропорциональны, нельзя одновременно увеличить силу и скорость мышечных усилий.
В периоде одиночной опоры маховая нога также участвует в придании скорости телу бегуна. С момента постановки ноги на опору до момента вертикали маховая нога за счет инерционных сил увеличивает силу давления на опору. С момента вертикали до момента отрыва опорной ноги от опоры инерция массы маховой ноги помогает быстрее выпрямить толчковую ногу в фазе отталкивания и тем самым увеличить скорость (принцип маятника). Время и скорость отталкивания во многом зависят от быстроты переноса маховой ноги вперед с момента постановки толчковой ноги на опору.
Период полета начинается с момента отрыва толчковой ноги от опоры до момента постановки маховой ноги на опору.
Здесь также можно выделить две фазы: 1) фаза подъема ОЦМ до наивысшей точки траектории ОЦМ; 2) фаза опускания ОЦМ до касания маховой ноги опоры и превращения ее в толчковую ногу. Такое деление периода полета на две фазы, конечно, чисто условное. И оно важно для того, чтобы понять, какое участие принимает сила тяжести в изменении скорости движения ОЦМ по траектории.
В период полета скорость движения не увеличивается, а наоборот, чем больше этот период, тем больше происходит потерь в скорости. Период полета характеризует длину бегового шага.
В конце фазы отталкивания ОЦМ получает определенную начальную скорость вылета, которая несколько гасится, так как движение ОЦМ происходит вверх–вперед до высшей точки траектории, затем происходит небольшое увеличение за счет силы тяжести. Сила тяжести в периоде полета тела бегуна выполняет двоякую функцию, сначала она снижает скорость движения ОЦМ, а затем, после высшей точки траектории, увеличивает ее (принцип метронома). В другие моменты сила тяжести не оказывает влияния на изменение скорости движения ОЦМ. Если бег выполняется не на ровной местности, а в гору или под гору, то тогда сила тяжести будет оказывать влияние на изменение скорости движения: при беге в гору скорость снижается, при беге под гору скорость движения увеличивается.
В периоде переноса ноги с момента постановки ноги на опору в фазе амортизации происходит снижение скорости движения ОЦМ за счет тормозящей силы, которая возникает всегда, и задача бегуна снизить ее воздействие. С одной стороны, тормозящая сила и инерционные силы тяжести после фазы полета в фазе амортизации негативно влияют на скорость движения, с другой стороны – в это время создаются предпосылки для эффективного отталкивания.
Мы знаем, что скорость тела бегуна можно увеличить только при взаимодействии с опорой. Следовательно, чтобы увеличить скорость бега, необходимо как можно чаще контактировать с опорой во время отталкивания. Период полета, как безопорный период, не создает скорости бега и вроде как бы не нужен. Какой самый идеальный предмет движения? Колесо! Нет тормозящих сил, постоянный контакт с опорой и только за счет сил трения создается скорость движения. А животный мир? Посмотрите, почти все животные имеют четыре «ноги», за счет чего у них увеличивается количество контактов с опорой, а значит, они бегут быстрее человека (лишь кенгуру передвигается прыжками, но какие сильные мышцы для этого надо иметь). Была бы у человека хотя бы еще одна нога, то скорость бега возросла бы намного.
Для чего же нужен период полета в беге? Именно в этом периоде после фазы отталкивания мышцы, участвующие в нем, расслабляются и получают кратковременный отдых. Невозможно, чтобы мышцы все время находились в возбужденном состоянии, даже при беге на короткие дистанции.
Что такое мышечные судороги? Это постоянное возбуждение мышц, которое несет в себе негативные последствия, как для мышц, так и для нервной системы. Умение бегуна рационально чередовать мышечную работу и мышечное расслабление имеет большое значение в беге на любые дистанции, и не только в беге, но и при выполнении любой физической деятельности. Рациональное чередование работы и отдыха мышц характеризует межмышечную координацию спортсмена. Период полета (или длина бегового шага) должен быть оптимальным и будет зависеть от физических качеств бегуна, в первую очередь, от силы ног, длины ног, подвижности в тазобедренных суставах и индивидуальной рациональной техники бега.
Скорость бега зависит как от длины шага, так и от частоты шагов. Оптимальное соотношение этих параметров характеризует ритм бега и рациональность техники бегуна.
Чтобы увеличить скорость бега, необходимо, во-первых, работать над уменьшением времени опоры, т.е. при той же силе отталкивания уменьшить время отталкивания. Так как период опоры и период переноса связаны друг с другом, то уменьшение времени опоры вызовет и уменьшение времени переноса, и наоборот, т.е. быстрое сведение бедер и быстрый вынос бедра маховой ноги вперед уменьшат время переноса и, следовательно, помогут быстрее выполнить отталкивание за меньшее время. Быстрый «съем» толчковой ноги с опоры после отталкивания также убыстряет перенос ее вперед. Субъективное ощущение, которое должно возникать при этом, такое, словно убираем ногу с раскаленного песка, чтобы не обжечься.
Во-вторых, увеличение скорости бега происходит за счет уменьшения времени полета:
1) снижение вертикального колебания ОЦМ, т.е. приближение кривизны траектории к горизонтали; 2) активная постановка толчковой ноги в последней части периода полета, т.е. не ждать опору, а активно идти на сближение с ней. В то же время такая активная постановка ноги может способствовать ударному воздействию на тело бегуна в фазе амортизации – это негативный фактор. Поэтому нога должна ставиться быстро и в то же время мягко, пружинисто, за счет увеличения силы тяги мышц, противодействующей снижению ОЦМ.
Техника движений рук в беге зависит от скорости бега. На коротких дистанциях, где задача бегуна развить максимальную скорость, амплитуда движений рук наибольшая, скорость движения рук совпадает с частотой беговых шагов. Частота движений рук и ног взаимосвязана между собой. Чтобы увеличить частоту беговых шагов, надо увеличить частоту движений рук. Руки, согнутые в локтевых суставах под углом 90°, движутся вперед и несколько вовнутрь, затем назад и несколько кнаружи. В беге на короткие дистанции движения рук приближаются к направлению движения бегуна. С уменьшением скорости бега амплитуда движений рук уменьшается, также несколько меняется и направление. При выносе руки вперед она больше приближается к срединной плоскости, а при движении назад больше отводится кнаружи.
Наклон туловища также зависит от скорости бега. На коротких дистанциях при максимальной скорости наклон тела вперед наибольший, при беге на длинные дистанции наклон тела минимальный (до 5°). Надо помнить, что чрезмерный наклон туловища вперед, с одной стороны, помогает отталкиванию, но с другой – затрудняет вынос ноги вперед, уменьшая длину шага. Наклон туловища должен быть оптимальным и будет зависеть от скорости бега, дистанции и частей дистанции (стартовый разгон – бег с наклоном, с постепенным выпрямлением туловища; бег по дистанции – наклон оптимальный; финиширование – последние шаги выполняются с большим наклоном, чем при беге по дистанции).
При анализе техники движения ног рассматривают отдельно движения каждого звена нижних конечностей. Траектории движения центров масс бедра, голени и стопы имеют сложную форму. Если движение центра массы (ЦМ) бедра можно рассматривать как движение простого маятника, то траектории движения ЦМ голени и ЦМ стопы представляют собой сложные эллипсовидные формы.
Нога похожа на маятник, состоящий из трех последовательно соединенных маятников (бедро, голень, стопа).
Частота колебаний маятника зависит от его длины, а при значительных отклонениях, например, в ходьбе или беге, она будет зависеть от амплитуды движения ног. Чем короче маятник, тем чаще он будет двигаться.
Траектория движения ОЦМ в беге напоминает траекторию движения ОЦМ в ходьбе, но размах колебаний ОЦМ в первом случае гораздо выше и зависит от скорости бега: чем выше скорость бега, тем размах колебаний больше. Наивысшее положение ОЦМ наблюдается в период полета, низшее – в фазе амортизации, ближе к моменту вертикали. В этом положении происходит наибольшее сгибание в суставах опорной ноги и опускание таза. Помимо вертикальных колебаний ОЦМ имеются и поперечные колебания в сторону опорной ноги, так как она отклоняется кнаружи. Таким образом, колебания ОЦМ происходят как в вертикальном, так и в поперечном направлениях, создавая тем самым сложную траекторию движения ОЦМ.
Механические свойства тканей.
В биомеханике все ткани человека подразделяют по плотности и типу пространственной структуры на твердые (кость, эмаль и дентин зубов), мягкие (мышцы, эпителий, эндотелий, соединительная ткань, паренхима), жидкие (кровь, лимфа, ликвор, слюна, сперма).
Для многих живых тканей характерна нелинейная зависимость относительной деформации от приложенной поверхностной силы. Это означает, что их модуль Юнга не константа, а переменная величина, изменяющаяся в зависимости от σ и степени деформации. Модуль Юнга увеличивается по мере нарастания напряжения в силу разной природы упругих свойств биополимеров при малых и больших деформациях.
Молекулы, входящие в состав биополимеров, образуют многочисленные звенья, расположенные под углом друг к другу. Расположение звеньев определяется вторым началом термодинамики, соответствуя максимуму термодинамической вероятности. Под действием небольших усилий удлинение происходит за счет поворота звеньев, т. е. изменения ориентации и формы молекул. Если же напряжение превзойдет определенный предел, то звенья начинают не только поворачиваться, но и растягиваться за счет увеличения межатомных расстояний в молекулах. Чтобы растянуть звенья биополимеров, требуется гораздо большая сила, чем для их поворота. Проявлением перехода от первого ко второму типу процессов, обеспечивающих упругие свойства биополимера, служит резкое (скачком) возрастание модуля Юнга, начиная с определенного значения σ. В этом одна из причин нелинейной зависимости относительной деформации живых тканей от приложенного к ним напряжения.
Большая или меньшая выраженность нелинейности является наглядным критерием различий в механических свойствах разных тканей. Нелинейность ярко выражена в стенках артерий. Их деформация начинает развиваться уже при слабых усилиях (при повышении кровяного давления), но как только степень деформации достигнет физиологического предела прочности, потребуются гораздо большие усилия для дальнейшего растяжения сосудистой стенки. Тем самым предотвращается ее повреждение (разрыв). Подобным образом ведут себя все живые ткани, в которых зависимость  l от σ имеет нелинейный характер. Такая нелинейность присуща скелетным мышцам, особенно в состоянии сокращения. При малых деформациях модуль Юнга мышечной ткани сравнительно невелик (около 104 Па), а по мере увеличения деформации возрастает в десятки раз.
l от σ имеет нелинейный характер. Такая нелинейность присуща скелетным мышцам, особенно в состоянии сокращения. При малых деформациях модуль Юнга мышечной ткани сравнительно невелик (около 104 Па), а по мере увеличения деформации возрастает в десятки раз.
В живых тканях, как и в других композиционных средах, обладающих вязко-упругими и упруго-вязкими свойствами, процессы деформации развиваются в определенной последовательности. Сразу после приложения нагрузки возникает мгновенная упругая деформация. С некоторым запаздыванием начинается медленная упругая деформация, которая на всем протяжении действия нагрузки постепенно нарастает с убывающей скоростью. На этот процесс накладывается вязкое течение компонентов живой ткани, возрастающее с постоянной скоростью пока на нее действует механическое усилие и сохраняющееся после снятия нагрузки.
Соотношение продолжительности этих процессов зависит от времени действия на ткань механического усилия: чем оно короче, тем в большей степени живая ткань напоминает упругое тело, и в ее реакции доминирует первый процесс, тогда как при длительном механическом воздействии живая ткань (даже такая, как кость) проявляет свойства вязкого тела, в частности пластичность (способность к остаточной деформации) и ползучесть (непрерывную пластическую деформацию под действием постоянной нагрузки).
Одним из важнейших механических свойств живых тканей является их прочность — способность противостоять разрушению, выдерживая заданную нагрузку. Она определяется как величина, прямо пропорциональная минимальной разрушающей поверхностной силе ( ). Наибольшей прочностью отличается костная ткань, которая начинает разрушаться при о порядка 108 Па. При внезапном ударе прочность живых тканей меньше, чем в условиях медленного развития деформации.
). Наибольшей прочностью отличается костная ткань, которая начинает разрушаться при о порядка 108 Па. При внезапном ударе прочность живых тканей меньше, чем в условиях медленного развития деформации.
Прочность мягких тканей определяется, прежде всего, присутствием в них соединительнотканных волокон, среди которых наиболее прочны коллагеновые. Их прочность на растяжение немного меньше, чем у костной ткани ( = 107—108 Па), но они составляют лишь небольшую часть органа, образованного мягкими тканями. Поэтому любой из органов обладает гораздо меньшей прочностью, чем кости, в прочность которых к тому же вносят вклад не только коллагеновые волокна, но и минеральные компоненты (главным образом, кристаллы гидроксиапатита). Стенки крупных артерий разрываются при  , а стенки вен — при
, а стенки вен — при  .
.
Стенки артерии и желудочков сердца в большей степени, чем другие ткани организма, подвержены продолжительной переменной нагрузке (механическим колебаниям). В таких условиях многие материалы разрушаются при нагрузках, меньших предела прочности. Это явление называется усталостью материала. Живые ткани обладают поразительно высокой способностью противостоять механической усталости. Она не накапливается в живых тканях благодаря их непрерывному обновлению, связанному с высоким уровнем метаболизма и продукции энтропии, эффективно компенсируемой потоком отрицательной энтропии. С возрастом интенсивность обмена веществ и энергии понижается, обновление тканей замедляется, в результате чего изменяется их прочность. Следовательно, механизмы развития, предупреждения и снятия усталости как механического свойства принципиально различны в живой и неживой природе. В большинстве органов и тканей прочность начинает уменьшаться в 20-летнем, а в коже и зубах — в 50-летнем возрасте.
Механические свойства тканей животных и человека обусловлены в значительной степени следующими биополимерами: коллагеном, эластином, гликозаминогликанами, гликопротеинами и растворимыми протеинами. Во внеклеточной среде коллаген и эластин образуют волокна, а остальные биополимеры — основное вещество соединительной ткани.
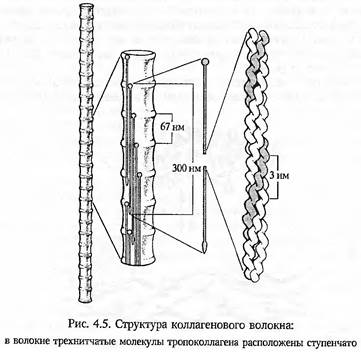 Коллаген синтезируется разными клетками соединительной ткани (фибробластами, хондробластами, остеобластами), эпителиоцитами и эндотелиоцитами, а потому представлен довольно большой (до 14 типов) группой очень стабильных трехспиральных белковых молекул. У высших позвоночных на его долю приходится около трети всех белков организма. У человека 50% всего коллагена содержится в костях, где он составляет 90% органического матрикса. Вторая половина сосредоточена в соединительной ткани, хряще, стенках сосудов, базальных мембранах многомембранных систем и т. д. Молекула коллагена состоит из трех полипептидных цепей, в каждой из которых примерно 1000 аминокислотных остатков, среди которых доминирует глицил — на его долю приходится примерно 33% всех аминокислотных остатков первичной структуры коллагена. Кроме глицила, в коллагене много аланила, пролила, оксипролила и оксилизила. Два последних специфичны для коллагена. Вторичная структура — β-спираль с левосторонним направлением вращения. Три таких β -спирали посредством поперечных связей свиваются в тройную спираль (спирализованную суперструктуру) — тропоколлаген диаметром 1,0—1,5 нм и длиной до 270 нм. Цепи коллагена I типа имеют несколько потенциальных мест для образования поперечных связей, а также по одному участку для присоединения N- и С- терминальных фрагментов.
Коллаген синтезируется разными клетками соединительной ткани (фибробластами, хондробластами, остеобластами), эпителиоцитами и эндотелиоцитами, а потому представлен довольно большой (до 14 типов) группой очень стабильных трехспиральных белковых молекул. У высших позвоночных на его долю приходится около трети всех белков организма. У человека 50% всего коллагена содержится в костях, где он составляет 90% органического матрикса. Вторая половина сосредоточена в соединительной ткани, хряще, стенках сосудов, базальных мембранах многомембранных систем и т. д. Молекула коллагена состоит из трех полипептидных цепей, в каждой из которых примерно 1000 аминокислотных остатков, среди которых доминирует глицил — на его долю приходится примерно 33% всех аминокислотных остатков первичной структуры коллагена. Кроме глицила, в коллагене много аланила, пролила, оксипролила и оксилизила. Два последних специфичны для коллагена. Вторичная структура — β-спираль с левосторонним направлением вращения. Три таких β -спирали посредством поперечных связей свиваются в тройную спираль (спирализованную суперструктуру) — тропоколлаген диаметром 1,0—1,5 нм и длиной до 270 нм. Цепи коллагена I типа имеют несколько потенциальных мест для образования поперечных связей, а также по одному участку для присоединения N- и С- терминальных фрагментов.
Тройные спирали тропоколлагена полимеризуются, объединяясь ковалентными связями также в спиралевидные фибриллы диаметром 1—12 мкм и длиной до 10 мкм, а те, в свою очередь, объединяются в коллагеновые волокна разной толщины (от 20 до 200 мкм). Четвертичные коллагеновые структуры тоже стабилизируются поперечными связями. Такое завершение строительства коллагеновых волокон осуществляется во внеклеточной среде (рис. 4.5). В костях они называются оссеиновыми, а в хрящах — хондриновыми волокнами. В кислой среде волокна разрушаются протеазами на молекулярные фрагменты. Такое разрушение оссеиновых волокон происходит, например, при резорбции кости остеокластами в процессе ее ремоделирования.
В сухожилиях, связках, стенках кровеносных сосудов коллагеновые волокна не переплетаются и в покое имеют гофрированные очертания, будучи уложены «со слабиной», а не «в натяг». При растягивании они вначале распрямляются, а затем могут удлиняться (без разрыва) не более чем на 10—20%. При таком удлинении предел прочности составляет, а модуль Юнга — 107—108 Па, тогда как при распрямлении он на 3—4 порядка меньше. В коже (дерме) коллагеновые волокна организованы в трехмерную сетку фибрилл, образующих волнистые ромбы.
Эластин — фибриллярный гликопротеин с молекулярной массой 70 кДа, обладающий упругостью. Она обусловлена обилием в первичной структуре (полипептидной цепи) аминокислотных остатков с неполярными группами. Среди них много пролила и глицила (как в коллагене), но очень мало гидроксипролила и отсутствует гидроксилизил. Молекулы эластина секретируются клетками во внеклеточное пространство. Там из них образуются волокна и слои, в которых отдельные молекулы связаны ковалентными сшивками в обширную сеть.
У эластина нет определенной третичной структуры — его полипептидная цепь может переходить от одной конформации к другой, от нее — к третьей и так далее. Под действием внешней силы каждая молекула способна растягиваться и сжиматься, вследствие чего вся эластиновая сеть может растягиваться и сжиматься наподобие резины (рис. 4.6). Полипептидные цепи, соединенные друг с другом в определенных местах жесткими связями, образуют парные, спирально скрученные нити. Они объединяются в волокна, в которых есть участки как с упорядоченным, так и с беспорядочным расположением молекул. Эластические волокна имеют модуль Юнга от 105 до 107 Па и способны растягиваться более чем в 2 раза, т. е. на 200%, а не на 10—20%, как коллагеновые. У человека много эластина содержится в восходящем отделе аорты. В шее копытных млекопитающих выйная связке образована главным образом эластином (он составляет почти 100% сухой массы). Благодаря этому животное может низко (до земли) опускать голову и довольно экономно расходовать мышечные усилия на поддержание головы в поднятом положении.
Основное вещество соединительной ткани образовано гликопротеинами и гликозаминогликанами (их раньше называли мукополисахаридами). Оно имеет очень невысокий модуль Юнга, относится к вязким средам и выполняет три биомеханические функции:
1) перераспределение нагрузки между волокнами;
2) эффективную изоляцию отдельных волокон, что предотвращает распространение разрывов при их локальном возникновении;
3) уменьшение трения при распрямлении коллагеновых волокон.
В разных тканях преобладают разные типы коллагена, а это, в свою очередь, определяется той ролью, которую коллаген играет в конкретном органе или ткани.
 Например, в пластинчатой костной ткани, из которой построено большинство плоских и трубчатых костей скелета, коллагеновые волокна имеют строго ориентированное направление: продольное — в центральной части пластинок, поперечное и под углом — в перифирической. Это способствует тому, что даже при расслоении пластинок фибриллы одной пластинки могут продолжаться в соседние, создавая таким образом единую волокнистую структуру кости.
Например, в пластинчатой костной ткани, из которой построено большинство плоских и трубчатых костей скелета, коллагеновые волокна имеют строго ориентированное направление: продольное — в центральной части пластинок, поперечное и под углом — в перифирической. Это способствует тому, что даже при расслоении пластинок фибриллы одной пластинки могут продолжаться в соседние, создавая таким образом единую волокнистую структуру кости.
Поперечно ориентированные коллагеновые волокна могут вплетаться в промежуточные слои между костными пластинками, благодаря чему достигается прочность костной ткани.
В сухожилиях коллаген образует плотные параллельные волокна, которые дают возможность этим структурам выдерживать большие механические нагрузки. В хрящевом матриксе коллаген образует фибриллярную сеть, которая придает хрящу прочность, а в роговице глаза коллаген участвует в образовании гексогональных решёток десцементовых мембран, что обеспечивает прозрачность роговицы, а также участие этих структур в преломлении световых лучей.
В дерме фибриллы коллагена ориентированы таким образом, что формируют сеть, особенно хорошо развитую в участках кожи, которые испытывают сильное давление (кожа подошв, локтей, ладоней), а в заживающей ране они агрегированы весьма хаотично.
Не нашли, что искали? Воспользуйтесь поиском: