ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
ТИП I. АНАЛИЗ РАБОТЫ МЕХАНИЗМОВ И ИНСТРУМЕНТОВ ЧЕЛНОЧНОЙ ШВЕЙНОЙ МАШИНЫ
Предусматривается выполнить графоаналитическими методами анализ кинематических и технологических особенностей работы универсальной швейной машины челночного стежка.
1.1. Исходные данные
На рисунке 1.1 изображена плоская кинематическая схема механизмов иглы и нитепритягивателя швейной машины челночного стежка.
На схеме приняты следующие обозначения: ОА - радиус кривошипа механизма иглы; ОВ - радиус кривошипа механизма нитепритягивателя; d - угол между кривошипами; AF - шатун механизма иглы; ВСЕ - шатун, нитепритягиватель; lВС = 25 мм, lСЕ = 34 мм, lBE = 54 мм; DC – коромысло, lDC = 31 мм; l1 - расстояние от главного вала (точка 0) до поверхности игольной пластинки, l1 = 150 мм; l2 - расстояние между осями главного и челночного валов, l2 = 174 мм; D1 - толщина сшиваемых материалов в сжатом состоянии; D2 - толщина игольной пластинки, D2 = 2 мм; d - диаметр окружности, соответствующей траектории движения носика челнока, d = 32 мм; М и N - точки расположения нитенаправителей.
В системе координат ХОУ положение неподвижных точек задано координатами: xM, yM (точка М); yN = 115 мм, xN = 4 мм (точка N); xD = -17 мм, yD = -28 мм (точка D).
Угол φ является переменной величиной. Он задает текущее положение кривошипа ОА. Отсчитывается от оси y по часовой стрелке.
Считается, что точка Е и нитенаправители М и N лежат в одной плоскости, совпадающей с плоскостью чертежа. Значения параметров, которые варьируются в зависимости от варианта задания, приводятся в таблице 1.1.
Таблица 1.1
Значения варьируемых параметров механизмов
| №№ варианта | Численные значения параметров | |||||||
| lОА, мм | lОВ, мм | δ, град | хМ, мм | уМ, мм | Δ1, мм | lАF, мм | n, об/мин | |
| 5,0 | ||||||||
| 2,5 | ||||||||
| 3,0 | ||||||||
| 3,5 | ||||||||
| 3,5 | ||||||||
| 4,0 | ||||||||
| 3,0 | ||||||||
| 4,0 | ||||||||
| 4,0 | ||||||||
| 14,5 | 15,5 | 2,0 |
В последней графе таблицы приведены значения частоты вращения главного вала n [об/мин]. Ими задается скорость вращения кривошипов ОА и ОВ.
Примечание: изображенная на рис. 1.1 схема может иметь зеркальное изображение. При ее построении следует пользоваться данными таблицы 1.1, изменив знак перед координатами соответствующих точек. Например, по варианту 1 следует принимать: уМ = 70 мм; хМ = -20 мм; уD = -28 мм; хD = 17 мм; уN = 115 мм; хN = -4 мм. При сохранении неизменным положения системы координат Х0У следует поменять направление отсчета угла φ на противоположное.
Задание.
1. Построить цикловую диаграмму перемещения иглы. Определить по диаграмме углы, соответствующие входу иглы в материал, входу иглы в отверстие игольной пластинки, моменту захвата носиком челнока петли-напуска игольной нити. Определить скорость иглы, соответствующую указанным выше моментам в процессе работы механизма.
2. Построить цикловую диаграмму подачи-выбирания нити нитепри-тягивателем. Определить по диаграмме углы, соответствующие подаче нити, выбиранию нити, затяжке стежка и сматыванию нити с бобины. Определить скорости перемещения глазка нитепритягивателя (по заданным положениям). Дать оценку скорости выбирания нити нитепритягивателем.
3. Построить цикловую диаграмму машины челночного стежка.
Проанализировать по диаграмме характерные моменты взаимодействия
инструментов машины. Отразить взаимодействие инструментов с помощью технологической схемы.
4. Разработать пространственную кинематическую схему машины.
Руководителем проекта в задание могут вноситься дополнения.

1.2. Содержание проекта. Методические указания к его выполнению
Проект данного типа содержит следующие разделы: введение; анализ работы кривошипно-ползунного механизма иглы; анализ работы кривошипно-коромыслового механизма нитепритягивателя; циклограмма и технологическая схема работы машины; кинематическая схема машины; результаты и выводы.
В разделе «ВВЕДЕНИЕ» формируется постановка задачи проекта, приводятся исходные данные и задание.
Раздел «АНАЛИЗ РАБОТЫ КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА ИГЛЫ» выполняется в соответствии с пунктом 1 задания. Анализ проводится с помощью диаграммы, выражаемой зависимостью уИ = у(φ). уИ - перемещение острия иглы, φ - угол поворота кривошипа ОА (рис. 1.1). Значение φ = 0 принимается соответствующим крайнему верхнему положению иглы.
Значения координат уИ определяются графическим методом путем построения механизма иглы в 12-ти положениях и расчетным методом по формуле
 ,
,
где r - радиус кривошипа, г = l0А;
l - длина шатуна, l = lAF.
Результаты, полученные графически и аналитически, сравниваются.
Диаграмма перемещения иглы строится по полученным значениям координат уИ. Эти координаты откладываются от оси абсцисс 01φ1, являющейся вспомогательной. Она совпадает с крайними верхними, положениями иглы.
Основная ось 0φ на диаграмме должна совпадать с положением плоскости игольной пластинки. Для определения ее местоположения необходимо знать глубину погружения острия иглы относительно плоскости игольной пластинки – уПП. Значение параметра уПП находится в соответствии с рисунком 1.2 по формуле
уПП = уПЧ + уК, (1)
где уК - конструктивный параметр, задающий расположение носика челнока в его крайнем верхнем положении относительно плоскости игольной пластинки;
уПЧ - глубина погружения острия иглы относительно траектории движения носика челнока.
Величина Ук рассчитывается по значениям l2, l1 и d (см. рис. 1.1).
Значение уПЧ находится из условий образования петли-напуска и захвата ее носиком челнока. Согласно рисунку 1.2б
уПЧ = h + hК + D,
где h - петельный ход или высота подъема иглы из нижнего положения до момента захвата петли-напуска носиком челнока,
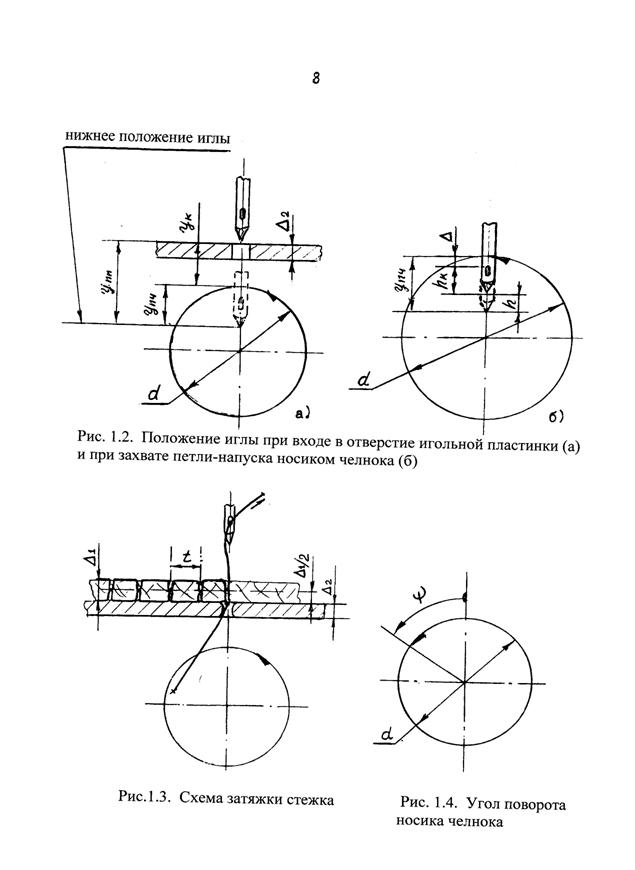
hК - конструктивный параметр иглы, расстояние от острия до верхней кромки ушка;
Δ - превышение носика челнока над верхней кромкой ушка иглы в момент захвата.
Параметры h и D являются в швейных машинах регулируемыми. Для универсальных машин челночного стежка принимают h» 1,5...2,5 мм; D = 1,2...2,0 мм.
Параметр hK зависит от конструкции иглы. Величину hK рекомендуется измерить на машине или принять в соответствии с рекомендациями литературы [1] (стр. 64-65).
Определив по выражению (1) уПП, откладывают его на диаграмме от нижнего положения иглы и проводят ось 0j, совпадающую с плоскостью игольной пластинки. Точки пересечения оси с диаграммой определяют моменты входа и выхода острия иглы из отверстия игольной пластинки.
Подобным образом определяют на диаграмме точки, соответствующие входу и выходу острия из материала. Их положение будет зависеть от толщины Δ1.
При подъеме иглы из нижнего положения на величину петельного хода h происходит захват носиком челнока петли-напуска игольной нити. Откладывая h на диаграмме от крайнего нижнего положения и проводя параллельно оси абсцисс горизонтальную линию, получают точку, соответствующую рассматриваемому моменту в процессе образования стежка.
Положение на диаграмме характерных точек определяют соответствующие значения угла j. Используя эти значения, строят механизм иглы в положениях, при которых игла входит в материал, игла входит в отверстие игольной пластинки, носик челнока захватывает петлю-напуск. Методом планов скоростей определяют скорость иглы для трех указанных моментов в работе механизма.
Раздел «АНАЛИЗ РАБОТЫ КРИВОШИПНО-КОРОМЫСЛОВОГО МЕХАНИЗМА НИТЕПРИТЯГИВАТЕЛЯ» выполняется в соответствии с пунктом 2 задания.
Для анализа работы механизма необходимо построить диаграмму подачи-выбирания нити глазком нитепритягивателя. Диаграмму принято выражать зависимостью L = L (j), где L - длина подаваемой или выбираемой нити.Координаты Li определяются графо-аналитическим методом путем построения механизма в 12-ти положениях. Точки Еi (i = 0,1,..., 11) образуют при построении траекторию движения главка нитепритягивателя. Участок нити, ограниченный нитенаправителем М, глазком Е и нитенаправителем N будет изменять свою длину по мере движения глазка. Поэтому
 ,
,
где LMEвN - длина нити на рассматриваемом участке при крайнем верхнем положении глазка;
LMEiN - длина нити на рассматриваемом участке при i -ом положении глазка.
Численные значения длин нити замеряются непосредственно на чертеже и определяются координаты Li диаграммы.
При построении диаграммы ось ординат L следует направлять вниз, что более удобно для последующего анализа. Кроме того, следует помнить, что угол j задает положение кривошипа 0А механизма иглы. Принимая при построении механизма нитепритягивателя j0 = 0, j1 = 30°, j2 = 60° и т.д., следует положения кривошипа 0В определять с учетом угла d (рис. 1.1). Таким образом достигается единство отсчета аргумента j на диаграммах обоих механизмов.
На диаграмме должны быть выделены точки, соответствующие крайнему верхнему и крайнему нижнему положениям глазка нитепритягивателя. Точками также отмечаются периоды, соответствующие затяжке стежка и сматыванию нити с бобины в количестве, достаточном для образования последующего стежка.
Следует учитывать, что в период затяжки стежка нитепритягиватель выбирает нить длиной Lзат. Согласно рисунку 1.3
 Lзат» D1.
Lзат» D1.
За один оборот главного вала машины в стежок укладывается нить длиной Lст» t + D1.
Длина стежка t в машинах регулируется. При анализе работы нитепритягивателя значение t следует выбирать по таблице 1.2.
Скорости перемещения глазка нитепритягивателя определяются путем построения планов скоростей для 5-ти положений механизма. Положения заданы углами jI, jII, jIII, jIV, jV (см. табл. 1.2). Расчет ведется при частоте вращения главного вала n (см. табл. 1.1).
Из перечисленной совокупности положений выбираются те, которые соответствуют периоду выбора нити в процессе образования стежка. Значения скоростей в таких положениях используются для оценки скорости выбора нити нитепритягивателем.
Таблица 1.2
Исходные данные для анализа работы механизма нитепритягивателя
| №№ варианта | t, мм | φI, град | φII, град | φIII, град | φIV, град | φV, град |
| 2,0 | ||||||
| 2,5 | ||||||
| 3,0 | ||||||
| 3,5 | ||||||
| 4,0 | ||||||
| 4,5 | ||||||
| 5,0 | ||||||
| 3,0 | ||||||
| 3,5 | ||||||
| 2,0 |
Раздел «ЦИКЛОГРАММА И ТЕХНОЛОГИЧЕСКАЯ СХЕМА РАБОТЫ МАШИНЫ» должен соответствовать пункту 3 задания.
Циклограмма работы машины челночного стежка должна включать цикловые диаграммы механизмов иглы, нитепритягивателя, челнока и двигателя ткани. Первые две диаграммы строятся по мере выполнения предыдущих разделов. Их располагают на графическом листе и на рисунке в тексте друг под другом. Ниже помещают цикловую диаграмму челнока, затем - диаграмму реечного механизма двигателя ткани. Все они должны иметь единую точку отсчета угла j: j = 0 при крайнем верхнем положении иглы.
Рекомендуется диаграмму челнока изображать в виде зависимости y = y (j). Угол y (рис. 1.4) отсчитывается от вертикальной оси, совпадающей с линией действия иглы, и определяет текущее положение носика челнока. Так как челнок вращается со скоростью в два раза большей, чем главный вал
y = 2j.
Значит диаграмма челнока будет отражаться линейной зависимостью. При y = 0 носик челнока должен находиться на линии действия иглы. Один из таких моментов будет совпадать с моментом захвата носиком петли-напуска.
При построении диаграммы реечного механизма двигателя ткани следует руководствоваться литературой [2].
В расчетно-пояснительной записке необходимо привести методику построения циклограммы машины, описать взаимодействие инструментов в процессе образования челночных стежков.
Технологическая схема работы машины выполняется на основе циклограммы. Для этого на цикловой диаграмме машины штриховыми линиями выделяют углы jI, jII, jIII, jIV, jV (см. табл. 1.2). Применительно к определенному моменту, заданному значением угла j, составляется схема. На ней отражаются инструменты и трасса игольной нити от бобины до шва. Отмечается направление движения инструментов. Для челнока задается положение носика. Угол y, определяющий это положение, рассчитывается по циклограмме.
Таким образом технологическая схема взаимодействия инструментов машины будет представлена 5-ю схемами (соответственно углам jI, jII, jIII, jIV, jV). Отражается она на графическом листе. В расчетно-пояснительной записке приводятся описания каждой схемы, расчет значения угла y и анализ взаимодействия инструментов машины.
Раздел «КИНЕМАТИЧЕСКАЯ СХЕМА МАШИНЫ» предусматривает разработку пространственной кинематической схемы одной из универсальных машин челночного стежка. Класс машины конкретизирует руководитель проекта в задании.
Приступая к разработке, необходимо подробно изучить конструкцию машины по литературным источникам. Используется литература по курсу «Машины и аппараты швейного производства».
При изображении схемы следует пользоваться правилами и рекомендациями, сформулированными на лекционных и лабораторных занятиях по рассматриваемому курсу. Частично используется литература [1, 4].
Обозначение звеньев на схемах производится арабскими цифрами. Исключение составляют детали типа валов, которые обозначаются римскими цифрами. Спецификацию для схемы не разрабатывают. Описание конструкции и принципа работы машины приводят в расчетно-пояснительной записке.
В разделе «РЕЗУЛЬТАТЫ И ВЫВОДЫ» подводятся итоги проделанной работы. Излагаются основные результаты, полученные на различных стадиях выполнения проекта. Формулировки в разделе должны быть краткими, лаконичными и отражать объем работы.
Расчетно-пояснительная записка к курсовому проекту на рассматриваемую тему должна содержать все разделы, перечисленные выше. Правила ее оформления изложены в разделе 3.
Графическая часть проекта выполняется в объеме 3-х листов формата A1.
Лист 1. Графический анализ работы механизмов. Циклограмма работы машины.
Лист 2. Технологическая схема работы машины.
Лист 3. Кинематическая схема машины челночного стежка.
Правила оформления графической части проекта приводятся в разделе 4 настоящей методической разработки.
Не нашли, что искали? Воспользуйтесь поиском: