ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Двигатель параллельного возбуждения
ЛАБОРАТОРНАЯ РАБОТА № 8
Исследование двигателя постоянного тока параллельного возбуждения
Цель:
Изучить устройство двигателя постоянного тока параллельного возбуждения и изучить теоретические сведения о двигателях постоянного тока параллельного возбуждения и изучить теоретические сведения о свойствах двигателя постоянного тока параллельного возбуждения
Задание:
1. Изучить устройство двигателя постоянного тока параллельного возбуждения и принцип его работы.
2. Изучить регулировочные характеристики двигателя постоянного тока параллельного возбуждения.
3. Изучить рабочие характеристики двигателя постоянного тока параллельного возбуждения.
Оборудование и материалы:
1. Схема работы двигателя постоянного тока параллельного возбуждения
2. Паспортные данные двигателя постоянного тока параллельного возбуждения
Методические указания:
Пуск двигателя
Ток якоря двигателя определяется формулой!!!. Если принять U и ∑r неизменными, то ток Iа зависит от противо-ЭДС Еа. Наибольшего значения ток Iа достигает при пуске двигателя в ход. В начальный момент пуска якорь двигателя неподвижен (п = 0) и в его обмотке не индуцируется ЭДС (Еа = 0). Поэтому при непосредственном подключении двигателя к сети в обмотке его якоря возникает пусковой ток (1):

|
Обычно сопротивление ∑r невелико, поэтому значение пускового тока достигает недопустимо больших значений, в 10-20 раз превышающих номинальный ток двигателя.
Такой большой пусковой ток весьма опасен для двигателя. Во-первых, он может вызвать в машине круговой огонь, а во-вторых, при таком токе в двигателе развивается чрезмерно большой пусковой момент, который оказывает ударное действие на вращающиеся части двигателя и может механически их разрушить. И наконец, этот ток вызывает резкое падение напряжения в сети, что неблагоприятно отражается на работе других потребителей, включенных в эту сеть. Поэтому пуск двигателя непосредственным подключением в сеть (безреостатный пуск) обычно применяют для двигателей мощностью не более 0,7-1,0 кВт. В этих двигателях благодаря повышенному сопротивлению обмотки якоря и небольшим вращающимся массам значение пускового тока лишь в 3-5 раз превышает номинальный, что не представляет опасности для двигателя. Что же касается двигателей большей мощности, то при их пуске для ограничения пускового тока используют пусковые реостаты (ПР), включаемые последовательно в цепь якоря (реостатный пуск).
Перед пуском двигателя необходимо рычаг Р реостата поставить на холостой контакт О (рис. 1). Затем включают рубильник, переводят рычаг на первый промежуточный контакт 1 и цепь якоря двигателя оказывается подключенной к сети через наибольшее сопротивление реостата rп р = r1 + r2 + r 3 + r 4.
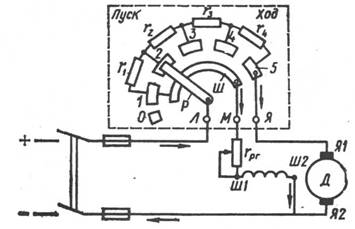 |
Рисунок 1. Схема включения пускового реостата
Одновременно через рычаг Р и шину III к сети подключается обмотка возбуждения, ток в которой в течение всего периода пуска не зависит от положения рычага Р, так как сопротивление шины по сравнению с сопротивлением обмотки возбуждения пренебрежимо мало.
Пусковой ток якоря при полном сопротивлении пускового реостата (2):

|
С появлением тока в цепи якоря I n max возникает пусковой момент Мп тах , под действием которого начинается вращение якоря. По мере нарастания частоты вращения увеличивается противо-ЭДС Еа = сеФп, что ведет к уменьшению пускового тока и пускового момента.
По мере разгона якоря двигателя рычаг пускового реостата переключают в положения 2, 3 и т. д. В положении 5 рычага реостата пуск двигателя заканчивается (rпр = 0). Сопротивление пускового реостата выбирают обычно таким, чтобы наибольший пусковой ток превышал номинальный не более чем в 2-3 раза.
Так как вращающий момент двигателя М прямо пропорционален потоку Ф, то для облегчения пуска двигателя параллельного и смешанного возбуждения сопротивление реостата в цепи возбуждения r pr следует полностью вывести (r рг = 0). Поток возбуждения Ф в этом случае получает наибольшее значение и двигатель развивает необходимый вращающий момент при меньшем токе якоря.
Для пуска двигателей большей мощности применять пусковые реостаты нецелесообразно, так как это вызвало бы значительные потери энергии. Кроме того, пусковые реостаты были бы громоздкими. Поэтому в двигателях большой мощности применяют безреостатный пуск двигателя путем понижения напряжения. Примерами этого являются пуск тяговых двигателей электровоза переключением их с последовательного соединения при пуске на параллельное при нормальной работе или пуск двигателя в схеме «генератор-двигатель».
Двигатель параллельного возбуждения
Схема включения в сеть двигателя параллельного возбуждения показана на рисунке 2(а). Характерной особенностью этого двигателя является то, что ток в обмотке возбуждения (ОВ) не зависит от тока нагрузки (тока якоря). Реостат в цепи возбуждения r рг служит для регулирования тока в обмотке возбуждения и магнитного потока главных полюсов.
Эксплуатационные свойства двигателя определяются его рабочими характеристиками, под которыми понимают зависимость частоты вращения п, тока I, полезного момента М 2, вращающего момента М от мощности на валу двигателя Р2 при U = const и I в = const (рис. 2, б).
 Для анализа зависимости п = f(P2), которую обычно называют скоростной характеристикой, обратимся к формуле, из которой видно, что при неизменном напряжении U на частоту вращения влияют два фактора: падение напряжения в цепи якоря Ia ∑ r поток возбуждения Ф. При увеличении нагрузки уменьшается числитель (U - Ia ∑ r), при этом вследствие реакции якоря уменьшается и знаменатель Ф. Обычно ослабление потока, вызванное реакцией якоря, невелико и первый фактор влияет на частоту вращения сильнее, чем второй. В итоге частота вращения двигателя с ростом нагрузки Р2 уменьшается, а график п - f(P2) приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потока Ф, то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рисунке 2(б). Однако такая зависимость п = f(P2) является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения п двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой.
Для анализа зависимости п = f(P2), которую обычно называют скоростной характеристикой, обратимся к формуле, из которой видно, что при неизменном напряжении U на частоту вращения влияют два фактора: падение напряжения в цепи якоря Ia ∑ r поток возбуждения Ф. При увеличении нагрузки уменьшается числитель (U - Ia ∑ r), при этом вследствие реакции якоря уменьшается и знаменатель Ф. Обычно ослабление потока, вызванное реакцией якоря, невелико и первый фактор влияет на частоту вращения сильнее, чем второй. В итоге частота вращения двигателя с ростом нагрузки Р2 уменьшается, а график п - f(P2) приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потока Ф, то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рисунке 2(б). Однако такая зависимость п = f(P2) является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения п двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой.
Рисунок 2. Схема двигателя параллельного возбуждения – (а);
рабочие характеристики двигателя параллельного возбуждения – (б)
При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.
Изменение частоты вращения двигателя при переходе от номинальной нагрузки к х.х., выраженное в процентах, называют номинальным изменением частоты вращения (3):

|
где п0 – частота вращения двигателя в режиме х.х.
Обычно для двигателей параллельного возбуждения Δ п ном = 2÷8% поэтому характеристику частоты вращения двигателя параллельного возбуждения называют жесткой.
Зависимость полезного момента М2 от нагрузки установлена формулой М2 = 9,55Р2/п. При п = const график М2 = f (Р 2 ) имел бы вид прямой. Однако с увеличением нагрузки частота вращения двигателя снижается, и поэтому зависимость М2 = f (Р 2 ) криволинейна.
При п = const вращающий момент двигателя М = М0 + М2. Так как рабочие характеристики двигателя строят при условии I в = = const, что обеспечивает постоянство магнитных потерь в двигателе, то момент х.х. М0 = const. Поэтому график зависимости М2 = f (Р 2 ) проходит параллельно кривой М2 = f (Р 2 ). Если принять поток Ф = const, то график М2 = f (Р 2 ) является в то же время выражением зависимости I = f (Р 2 ), так как М = смФIа.
Для получения аналитического выражения механической характеристики п =j{M) преобразуем выражение (4):

подставив в него значение тока якоря (5):

получим (6):
где п0 — частота вращения в режиме х.х.; Δп — изменение частоты вращения, вызванное изменением нагрузки на валу двигателя.
 |
Рисунок 3. Механические характеристики двигателя параллельного возбуждения:
а- при введении в цепь якоря добавочного сопротивления; б - при изменении основного магнитного потока; в - при изменении напряжения в цепи якоря
Если пренебречь реакцией якоря, то (так как I в = const) можно принять Ф = const. Тогда механическая характеристика двигателя параллельного возбуждения представляет собой прямую линию, несколько наклоненную к оси абсцисс (рис. 3, а). Угол наклона механической характеристики тем больше, чем больше значение сопротивления, включенного в цепь якоря. Механическую характеристику двигателя при отсутствии дополнительного сопротивления в цепи якоря называют естественной (прямая 1). Механические характеристики двигателя, полученные при введении дополнительного сопротивления в цепь якоря, называют искусственными (прямые 2 и 3).
Вид механической характеристики зависит также и от значения основного магнитного потока Ф. Так, при уменьшении Ф увеличивается частота вращения х.х. п0 и одновременно увеличивается Δп, т. е. увеличиваются оба слагаемых уравнения. Это приводит к резкому увеличению наклона механической характеристики, т.е. к уменьшению ее жесткости (рис. 3,б).
При изменении напряжения на якоре U меняется частота вращения п0, а Δп остается неизменной. В итоге жесткость механической характеристики (если пренебречь влиянием реакции якоря) не меняется (рис. 3, в), т. е. характеристики смещаются по высоте, оставаясь параллельными друг другу.
Регулирование частоты вращения двигателей параллельного возбуждения
Способы регулирования частоты вращения двигателей оцениваются следующими показателями: плавностью регулирования; диапазоном регулирования, определяемым отношением наибольшей частоты вращения к наименьшей; экономичностью регулирования, определяемой стоимостью регулирующей аппаратуры и потерями электроэнергии в ней.
Регулировать частоту вращения двигателя параллельного возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря.
Введение дополнительного сопротивления в цепь якоря. Дополнительное сопротивление (реостат r д) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока.
При включении сопротивления r д в цепь якоря выражение частоты принимает вид (7):

|
где п0 = U/(сеФ) – частота вращения в режиме х.х.;
Δп = Ia(∑r+r д )/ (сеФ) – изменение частоты вращения, вызванное падением напряжения в цепи якоря.
С увеличением гд возрастает Δп, что ведет к уменьшению частоты вращения. Зависимость п = f ( rд ) иллюстрируется также и механическими характеристиками двигателя параллельного возбуждения (рис. 3, а) с повышением r д увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (М = Мном) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I2a r д), которые интенсивно растут с увеличением мощности двигателя.
Изменение основного магнитного потока. Этот способ регулирования в двигателе параллельного возбуждения реализуется посредством реостата грг в цепи обмотки возбуждения (см. рис. 2, а).
Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения. При увеличении r рг частота вращения растет. Зависимость частоты вращения от тока возбуждения выражается регулировочной характеристикой двигателя п = f(Ie) при I = const и U= const.
 |
Рисунок 4. Регулировочные характеристики двигателя параллельного возбуждения
C уменьшением магнитного потока Ф частота вращения п увеличивается по гиперболическому закону (рис. 4, а). Но одновременно уменьшение Ф ведет к росту тока якоря I а = М/(смФ). При потоке Ф = Ф' ток якоря достигает значения I’а = U/(2 ∑ r), т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю (I’а∑ r = U/2) В этих условиях частота вращения двигателя достигает максимума n mах. При дальнейшем уменьшении потока (Ф < Ф') частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Iа второе слагаемое выражения (4) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения n mах во мною раз превосходит номинальную частоту вращения двигателя пном и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата rрг необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П допускается превышение частоты вращения над номинальной не более чем в 2-3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма Фост, при котором частота вращения может достигнуть опасного значения.
Вид регулировочных характеристик п = f (Ф) зависит от значения нагрузочного момента М2 на валу двигателя: с ростом M2 максимальная частота вращения n max уменьшается (рис. 4, б).
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях параллельного возбуждения ток I в = (0,01÷0,07) I а, а поэтому потери в регулировочном реостате (I в2 r рг) невелики.
Однако диапазон регулирования обычно составляет n max / n min = 2÷5. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты – опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основного магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня.
Изменение напряжения в цепи якоря. Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при I в = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n0 пропорциональна напряжению, а Δ n от напряжения не зависит (6), поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 3, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 5, а).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г и двигателя Д используется возбудитель В – генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 5, б) известна под названием системы «генератор—двигатель» (Г-Д).
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
 |
Рисунок 5.Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение направления вращения (реверс) двигателя, работающего по системе Г-Д, осуществляется изменением направления тока в цепи возбуждения генератора Г переключателем Я, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховик М, который запасает энергию в период уменьшения нагрузки на двигатель Д и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазоне n max / n min ≥25. Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
Импульсное регулирование частоты вращения. Сущность этого способа регулирования иллюстрируется схемой, изображенной на рисунке 6(а). Цепь обмотки якоря двигателя параллельного (независимого) возбуждения периодически прерывается ключом К. Во время замыкания цепи якоря на время t к обмотке якоря подводится напряжение U = U имп и ток в ней достигает значения Iа max. Затем ключом К цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения Iа min (при размыкании ключа К ток в обмотке якоря замыкается через диод VD). При следующем замыкании ключа К ток достигает значения Iа max и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение (8):
|
где Т – отрезок времени между двумя следующими друг за другом импульсами напряжения (рис. 6, б);
α = t/T – коэффициент управления.
При этом в обмотке якоря проходит ток, среднее значение которого Iа ср = 0,5(Iа max + Iа min).
При импульсном регулировании частота вращения двигателя (9):

|
Таким образом, импульсное регулирование частоты вращения аналогично регулированию изменением подводимого к цепи якоря напряжения. С целью уменьшения пульсаций тока в цепи якоря включена катушка индуктивности (дроссель) L, а частота подачи импульсов равна 200-400 Гц.
 |
Рисунок 6. Импульсное регулирование частоты вращения двигателя постоянного тока
На рисунке 6 (в) представлена одна из возможных схем импульсного регулирования, где в качестве ключа применен управляемый диод – тиристор VS. Открывается тиристор подачей кратковременного импульса от генератора импульсов (ГИ) на управляющий электрод (УЭ) тиристора. Цепь L1C, шунтирующая тиристор, служит для запирания последнего в период между двумя управляющими импульсами. Происходит это следующим образом: при открывании тиристора конденсатор С перезаряжается через контур L1C и создает на силовых электродах тиристора напряжение, обратное напряжению сети, которое прекращает протекание тока через тиристор.
Параметрами цепи L1C определяется время (с) открытого состояния тиристора:  Здесь L выражается в генри (Гн); С – в фарадах (Ф).
Здесь L выражается в генри (Гн); С – в фарадах (Ф).
Значение среднего напряжения Ucp регулируется изменением частоты следования управляющих импульсов от генератора импульсов на тиристор VS.
Жесткие механические характеристики и возможность плавного регулирования частоты вращения в широком диапазоне определили области применения двигателей параллельного возбуждения в станочных приводах, вентиляторах, а также во многих других случаях регулируемого электропривода, где требуется устойчивая работа при колебаниях нагрузки.
Режимы работы машины постоянного тока
В двигателях параллельного возбуждения при неизменном токе в обмотке возбуждения (I в = const) магнитный поток изменяется при нагрузке весьма незначительно, поэтому с некоторым приближением можно принять Ф = const. В этом случае электромагнитный момент пропорционален току в цепи якоря и механическая характеристика п = f(М) может быть представлена зависимостью п = f(Ia) (рис. 7). Если эту характеристику продолжить в обе стороны за пределы осей координат (прямая 1), то можно показать, что электрическая машина в зависимости от величины и знака внешнего момента, действующего на ее вал со стороны связанного с ним механизма, может работать в трех режимах: двигательном, тормозном и генераторном.
При работе двигателя без нагрузки ток в цепи якоря Iа0 небольшой. При этом частота вращения п = n0 (точка А). Затем с появлением на валу двигателя нагрузочного момента, противодействующего вращающему, ток в цепи якоря возрастает, а частота вращения уменьшается. Если увеличить противодействующий момент до значения, при котором якорь двигателя остановится (точка В), то ЭДС Еа = 0 и ток двигателя достигает значения Iак = U/∑r. Если двигатель применяют для привода механизма, нагрузочный момент которого может быть больше вращающегося (например, привод барабана, на который наматывается трос с грузом), то при последующем увеличении нагрузочного момента этого механизма якорь машины вновь начнет вращаться, но теперь уже в другую сторону. Теперь момент, действующий на вал электрической машины со стороны нагрузочного механизма, будет вращающим, а электромагнитный момент машины – тормозящим, т. е. электрическая машина перейдет в тормозной режим. При работе машины в этом режиме ЭДС якоря действует согласованно с напряжением, т. е. Ia=(U + Еа) / ∑r.
При использовании машины в тормозном режиме необходимо принять меры для ограничения тока якоря. С этой целью в цепь якоря включают добавочное сопротивление, величина которого обеспечивает получение искусственной характеристики двигателя, пересекающейся с осью абсцисс при токе якоря Iaном < Iак (штриховая прямая).
Если при работе двигателя в режиме х.х. к его валу приложить момент, направленный в сторону вращения якоря, то частота вращения, а следовательно, и ЭДС Еа начнут возрастать. Когда ЭДС Еа = U, машина не будет потреблять тока из сети (точка С) и частота вращения якоря достигает значения, называемого пограничной частотой вращения n х х.
 |
Рисунок 7. Режимы работы машины постоянного тока:
3- с параллельным (независимым) возбуждением; 2 – со смешанным возбуждением;
3 – с последовательным возбуждением
При дальнейшем увеличении внешнего момента на валу машины ЭДС Еа станет больше напряжения, а в цепи якоря опять возникает ток, но другого направления. При этом машина перейдет в генераторный режим: механическая энергия, затрачиваемая на вращение якоря, будет преобразовываться в электрическую и поступать в сеть.
Перевод машины из двигательного в генераторный режим используют для торможения двигателя, так как в генераторном режиме электромагнитный момент является тормозящим (рекуперативное торможение).
Не нашли, что искали? Воспользуйтесь поиском: