ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Трифазні синхронні передачі
Трифазні сельсини конструктивно такі ж, як і звичайні асинхронні двигуни з фазним ротором та розподіленими обмотками. Статорна обмотка, тобто обмотка збудження, приєднується до трифазної мережі з постійною частотою напруги. Роторна обмотка є обмоткою синхронізації, яка через контактні кільця та щітки з’єднується з лінією зв’язку.
Схема трифазної синхронної передачі подана на рис.16.1. Обмотки синхронізації сельсина вмикаються зустрічно з додержанням послідовності чергування фаз (як і при вмиканні на паралельну роботу синхронних генераторів).

Рис. 16.1. Схема вмикання трифазної синхронної передачі
Якщо обмотки роторів обох машин будуть розташовані у просторі однаково відносно своїх статорних обмоток, тобто кут непогодження θ=0, то ЕРС роторних обмоток, які виникають під дією обертових магнітних полів статорів, будуть рівними за величинами й протилежні за знаками. 
а) б)
Рис. 16.2. Векторна діаграма для трифазних сельсинів
Тому зрівняльні струми в ланцюгах роторів проходити не будуть. Для цього випадку векторна діаграма наведена на рис.16.2, а.
У зв’язку з відсутністю струму ротора машини не створюють обертових моментів, тому ротори залишаються в спокої при будь-якому положенні обмоток роторів по відношенню до обмоток статорів при θ=0. при цьому по обмотках статорів проходять струми холостого ходу, які вміщують реактивну (намагнічуючу) та активну (яка визначається втратами холостого ходу) складові.
З появою кута непогодження θ ЕРС Е2I та Е2II зсовуються між собою за фазою на кут рθ (р – число пар полюсів машини).
Векторна діаграма для цього випадку подана на рис.16.2, б. Вона побудована за рівняннями:
 1.
1.  ;
;
2.  , (16.5)
, (16.5)
де
z2І, z 2ІІ – опори вторинних ланцюгів машин І, ІІ в режимі короткого замкнення;
İ2 – зрівняльний стум, виникаючий в роторному ланцюзі під дією ΔĖ.
Якщо машини однакові, то z 2І = z2ІІ = z2; Е2І = Е2ІІ = Е2. Тому
 . (16.6)
. (16.6)
Струм первинного ланцюга:
 . (16.7)
. (16.7)
Нехтуючи спадом напруги в первинній обмотці від струму намагнічування Іm, тобто вважаючи  , та враховуючи, що
, та враховуючи, що  , одержимо:
, одержимо:
 . (16.7)
. (16.7)
Оскільки в машинах середньої й великої потужності r2<<x2, можливо вважати в цих випадках z2≈x2, тобто з рівняння 2 системи (16.5) одержимо:
 . (16.8)
. (16.8)
Тому вектор струму İ2 відстає від ΔĖ на 90º.
Якщо активна складова струму İ2а співпадає за фазою з вектором Ė2 якоїсь з машин, то ця машина працює в генераторному режимі (датчика). Якщо ж İ2а та Ė2 у протифазі (- İ2а та Ė2), то машина працює в двигуновому режимі (приймач). В залежності від кута θ (поворот за чи проти поля статора) будь-яка з машин може бути як датчиком, так і приймачем.
У зв’язку з тим, що активна складова струму для машин має різні знаки, машини створюють моменти різних знаків, які намагаються звести кут θ до нуля поворотом обох роторів у протилежних напрямах.
Якщо ротор датчика буде безперервно обертатись, то ротор приймача буде рухатися за ним синхронно й синфазно з деякою погрішністю, яка визначається кутом θ.
Суттєвим недоліком трифазної системи синхронної передачі є неоднакова залежність М(θ) при обертанні приймача за та проти напряму обертання поля статора.
З рис.16.1 на рис. 16.3 подана енергетична діаграма при повороті ротора приймача на кут θ по (суцільні стрілки) та проти (штрихові стрілки) поля статора.
Припустимо, що машина ІІ є приймачем. Тоді при повороті ротора приймача за полем статора передача потужності здійснюється від машини І до машини ІІ.
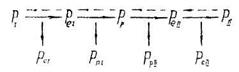
Рис. 16.3. Енергетична діаграма трифазних сельсинів
Електромагнітна потужність приймача РеІІ для цього випадку:
 , (16.9)
, (16.9)
де
РІ – потужність, споживана машиною І від мережі;
РсІ – втрати потужності в статорі машини І;
РрІ, РрІІ - втрати потужності в роторі відповідно І та ІІ машин.
При повороті ротора приймача проти поля статора:
 , (16.10)
, (16.10)
де
РІІ – потужність, споживана машиною ІІ від мережі;
РсІІ – втрати потужності в статорі машини ІІ
Віднімаємо (16.9) з (16.10). Тоді:
 , (16.11)
, (16.11)
тобто
 >
> 
на подвоєну величину втрат в роторах та в сталі статора датчика. Тому електромагнітні моменти
 >
>  ,
,
тобто при повороті ротора приймача проти поля він створює більший момент, ніж за полем.
Визначаючи аналогічно електромагнітні моменти, з урахуванням рис.16.3, можливо довести, що при повороті ротора машини І за полем, а ротора машини ІІ – проти поля (компенсація θ) МІ<МІІ. При поворотах роторів у інших напрямах МІ>МІІ.
При повороті ротора датчика в будь-який бік він буде відчувати момент проти напряму повороту, а ротор приймача – за напрямом повороту. Не однаковість моментів, які створюються датчиком та приймачем при різних напрямах обертання, обумовлює різну точність синхронної передачі кута при одному й тому ж навантажувальному моменті. Як це витікає з кривої М(θ) (рис.16.4), при обертанні ротора проти поля діапазон можливих кутів непогодження ширший, ніж за полем.
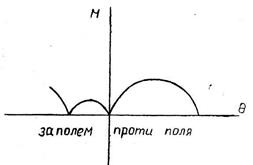
Рис. 16.4. Кутові характеристики трифазних сельсинів
Не нашли, что искали? Воспользуйтесь поиском: