ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Спеціальні режими роботи сельсинів
У низці випадків використовують спеціальні режими роботи сельсинної системи синхронної передачі кута: робота одного датчика на кілька приймачів, передача при зсуві фази між напругами датчика та приймача, збільшена відстань між датчиком та приймачем, робота в системі синхронного зв’язку різнотипних датчика та приймача. Кожен з цих режимів має свої особливості, які ми розглянемо.
Досить часто в індикаторній системі синхронної передачі від одного датчика працює кілька приймачів, які забезпечують синхронний поворот або синхронне обертання індикаторів у кількох пунктах. Така передача застосовується, наприклад, при необхідності передачі положення якогось регулюючого органа на головний пульт керування та місцеві налагоджувальні пульти.
У відповідності з формулою (16.25)
 , (16.66)
, (16.66)
де zд, zп – відповідно опори датчика та приймача.
Тоді зі співвідношень (16.31):
 . (16.67)
. (16.67)
Синхронізуючий момент може бути розрахований за формулою (16.42) з урахуванням (16.44), (16.66), (16.67):
 , (16.68)
, (16.68)
 . (16.69)
. (16.69)
Питомий синхронізуючий момент дорівнює:
 , (16.70)
, (16.70)
де
 . (16.71)
. (16.71)
Якщо в схемі синхронної передачі використовуються два сельсина, то
 ;
;
 . (16.72)
. (16.72)
Якщо від одного датчика працює т однакових приймачів, то еквівалентний опір дорівнює:
 . (16.73)
. (16.73)
Тоді питомий синхронізуючий момент датчика:
 . (16.74)
. (16.74)
У зв’язку з тим, що через обмотки синхронізації кожного приймача проходить струм в т разів менший, ніж струм датчика, питомий синхронізуючий момент приймача буде в т разів меншим:
 . (16.75)
. (16.75)
Питомі синхронізуючі моменти датчика та приймача можливо виразити через Мсп2:
 ;
;
 ; (16.76)
; (16.76)
 ; (16.77)
; (16.77)
При т>1 М д сп збільшується, а Мпсп зменшується. Тому зменшується точність роботи системи. Для того, щоб зберегти точність синхронної передачі, необхідно, щоб
 . (16.78)
. (16.78)
Тоді з урахуванням формул (16.73), (16.74):
 ; (16.79)
; (16.79)
 . (16.80)
. (16.80)
Таким чином, Мпсп останеться без змін, а М д сп зросте в т разів.
Для одержання високої точності необхідно, щоб усі приймачі мали однакову конструкцію, належали до одного класу точності й були однаково завантажені.
Стійкість приймачів у синхронному положенні збільшується зі збільшенням числа приймачів, оскільки на синхронізацію приймача діють і паралельно увімкнені приймачі.
При нерівномірному завантаженні приймачів створюється додатковий кут непогодження між приймачами, тобто похибка зростає.
Найбільша відстань між сельсинами визначається допустимим зменшенням синхронізуючого моменту, тобто опором лінії зв’язку. Визначимо, як залежить синхронізуючий момент Мс від опору лінії зв’язку. Для цього скористуємось формулами (16.49), (16.42), (16.20), (16.21):
 , (16.81)
, (16.81)
де
 , (16.82)
, (16.82)
β2 визначається формулою (16.22), звідки:
 ; (16.83)
; (16.83)
 ; (16.84)
; (16.84)
 ; (16.85)
; (16.85)
 ; (16.86)
; (16.86)
 . (16.87)
. (16.87)
З урахуванням співвідношень (16.82)÷(16.87):
 . (16.88)
. (16.88)
Звичайно х>>хлз, тобто δх≈0. З урахуванням цього:
 . (16.89)
. (16.89)
Якщо лінії зв’язку короткі, то можливо вважати δr≈0. Тоді:
 . (16.90)
. (16.90)
Зміну синхронізуючого моменту в залежності від rлз можливо визначити, як
 . (16.91)
. (16.91)
Зі співвідношення (16.91) видно, що відношення  залежно від відносного активного опору ліній зв’язку δr за формулою (16.86) та від відносного індуктивного опору обмоток синхронізації β за формулою (16.84). При цьому β зростає зі збільшенням потужності сельсина.
залежно від відносного активного опору ліній зв’язку δr за формулою (16.86) та від відносного індуктивного опору обмоток синхронізації β за формулою (16.84). При цьому β зростає зі збільшенням потужності сельсина.
Для підвищення далекості передачі зі збереженням Мс та інших рівних умов необхідно або зменшити δr, що пов’язане зі збільшенням перерізу провідників ліній зв’язку й тому не раціональне, або збільшити δх, вмикаючи в кожен промінь обмотки синхронізації дросель з опором хдр. В останньому випадку можливо не тільки зберегти Мс, але й підвищити його до Мстах.
Визначимо Мстах й величину хдр. Для цього визначимо з формули (16.81), при якому β2кр виникає Мстах. Досліджуючи (16.81) на максимум, визначаємо що β2кр=1. Тоді:
 . (16.92)
. (16.92)
Якщо в лінії зв’язку увімкнені дроселі, то у відповідності з (16.83)÷(16.87):
 , (16.93)
, (16.93)
де
 , (16.94)
, (16.94)
 . (16.95)
. (16.95)
З формули (16.92) з урахуванням (16.87):
 . (16.96)
. (16.96)
Зі співвідношення (16.81) з урахуванням (16.87):
 . (16.97)
. (16.97)
Відносне значення синхронізуючого моменту:
 . (16.98)
. (16.98)
Для визначення хдр скористаємось формулою (16.93) при β2=β2кр=1. Тоді:
 . (16.99)
. (16.99)
Отже, якщо параметри лінії зв’язку витримувати такими, щоб β2=β2кр=1, то далекість передачі можливо збільшити необмежено. З порушенням цієї умови Мс зменшується.
Збільшення далекості передачі може призвести до різних умов збудження датчика та приймача, напруга збудження датчика може виявитись більшою, ніж приймача. Тому послідовно з обмоткою збудження приймача вмикається обмотка трансформатора струму, яка додає величину  ΔU, що пропорційна струмові навантаження.
ΔU, що пропорційна струмові навантаження.
З формули (16.44) визначається максимальний синхронізуючий момент Мстах.
Для одного променя датчика та приймача може бути наведена векторна діаграма рис.16.18, яка аналогічна рис.16.7.
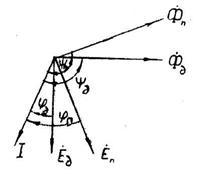
Рис. 16.18. Векторна діаграма сельсинної передачі при довгій живлячій мережі
З рис.16.18 витікає, що при довгій живлячій мережі, яка пов’язує обмотки збудження сельсинів, виникають різні фази напруг збудження та, відповідно, різні фази магнітних потоків Фзб та Фп. Тому виникає φп≠φд. Оскільки Мстах залежить від
 ,
,
тобто
 ;
;  ,
,
то зі збільшенням індуктивності живлячої лінії

зростає φп, тобто напруга збудження приймача

буде випереджувати напругу збудження датчика
 .
.
А це призведе до збільшення Мстах приймача, оскільки φп>φд.
В схемах синхронної передачі кута можуть застосовуватись різнотипні сельсини-датчики та сельсини-приймачі. Точність роботи таких систем буде оцінюватись за нижчим класом точності типа сельсина, застосованого в даній схемі. Кількість сельсинів-приймачів при багатократному прийманні в такому разі визначається експериментально.
Не нашли, что искали? Воспользуйтесь поиском: