ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
МОДЕЛИРОВАНИЕ РАБОТЫ ЭЛЕКТРОПРИВОДА ЛИФТА
3.1 Описание звеньев модели
Система управления работает по схеме с обратной связью по скорости. Причем заданных скоростей движения кабины несколько: при перемещении между соседними этажами лифт движется с малой скоростью, при перемещении более двух этажей лифт движется с большой, так называемой, крейсерской скоростью. Анализ ситуации выполняет электронная система (в лифтовой станции управления), которая выдает команды напреобразователь частоты. При подходе лифта к требуемому этажу срабатывает концевой выключатель, и скорость кабины снижается, при точном расположении кабины на этаже срабатывает второй концевой выключатель – кабина останавливается и подается питание на электромеханический тормоз.
Требуется обеспечить плавное трогание и останов кабины лифта, поддержание заданной скорости движения кабины.
При трогании лифта с ускорением на людей, находящихся в лифте действуют «сжимающие или растягивающие силы». При применении ПЧ параметры ускорения настраиваются таким образом, что человек не чувствует перегрузок. Скорость изменяется по закону «S – кривой» преобразователя частоты. Применение ПЧ для управления движением лифта обеспечивает:
- комфортность для пассажиров за счет плавности хода от момента трогания до полного останова кабины;
- продление ресурса оборудования за счет исключения резких динамических нагрузок;
- повышенную точность останова кабины.
Кроме этого преобразователь частоты должен иметь настройку на векторное управление для регулирования электромагнитного момента асинхронной машины. Структурная схема системы векторного управления с ориентацией по вектору потокосцепления ротора в программе «MatLab» приведена на рисунке 3.1.
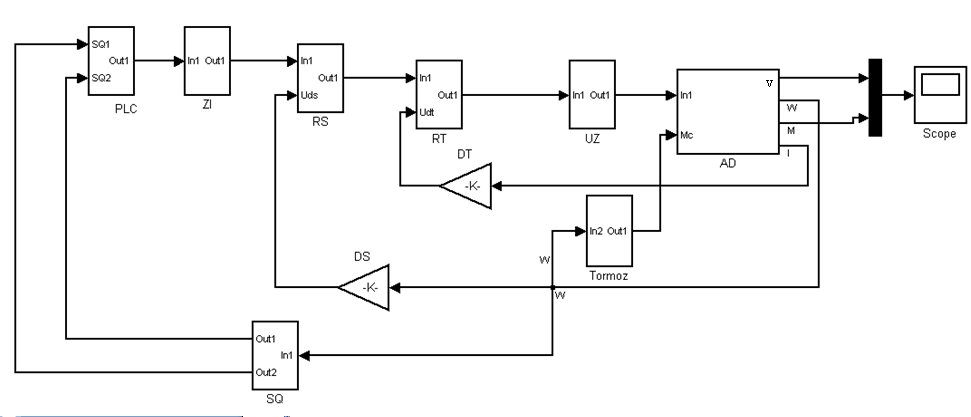
Рисунок 3.1 - Схема структурная для моделирования переходных режимов:
PLC - программируемый контроллер; ZI - задатчик интенсивности разгона; RS - регулятор скорости; RT - регулятор тока; UZ - преобразователь частоты; AD - модель асинхронного электродвигателя; DT - датчик тока; DS - датчикr скорости; SQ - модель этажных конечных выключателей; Tormoz - модель механического тормоза.; scope -осциллограф.
Преобразователь частоты.
Преобразователь частоты для линейного участка характеристики управления представлен апериодическим звеном первого порядка с передаточной функцией вида:
 , (3.1)
, (3.1)
где ТП - постоянная времени цепи управления преобразователем частоты, которая при высоких частотах модуляции выходного напряжения не превышает 0,01с.;
КП - передаточный коэффициент преобразователя частоты рассчитывается по формуле:
 , (3.2)
, (3.2)
где UУ - максимальное входное напряжение управления преобразователем, В;
kд1 - коэффициент передачи электродвигателя.
 , (3.3)
, (3.3)
где ω0- синхронная скорость асинхронной машины, рад./с.
 ,
,
После подстановки в формулу (3.1) полученных значений получаем:
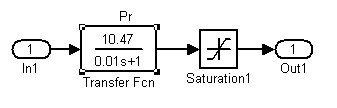
Рисунок 3.2 - Структура блока UZ
Передаточная функция датчика скорости и тока.
Датчик скорости представлен безынерционным усилителем с передаточной функцией вида
 , (3.4)
, (3.4)
где Кс – коэффициент обратной связи по скорости.
 , (3.5)
, (3.5)
Датчик тока принимаем безынерционным усилителем с передаточной функцией:
 (3.6)
(3.6)
где Kд.т. - коэффициент передачи датчика тока.
 , (3.7)
, (3.7)
где Iмах - ток статора с учётом перегрузки преобразователя, А;
Uд.т. - сигнал управления преобразователем, В;
kд2 - коэффициент передачи электродвигателя по моменту.
 . (3.8)
. (3.8)

Передаточная функция асинхронного электродвигателя.
Двигатель переменного тока при питании от инвертора напряжения при линейных механических характеристиках описывается апериодическим звеном первого порядка.
Передаточная функция апериодического звена первого порядка имеет вид:
 , (3.9)
, (3.9)
где β - жёсткость механической характеристики
Тэ – электромагнитная постоянная двигателя, с.
 , (3.10)
, (3.10)
где sk - критическое скольжение электродвигателя.
 , (3.11)
, (3.11)
где sн - номинально скольжение электродвигателя;
km - перегрузочная способность электродвигателя по максимальному моменту.
Номинальное скольжение электродвигателя находится по формуле
 , (3.12)
, (3.12)

Коэффициент жёсткости естественной механической характеристики
 , (3.13)
, (3.13)
где Мк - критический момент электродвигателя, Нм.
 . (3.14)
. (3.14)


После подстановки расчётных параметров в формулу (3.9) получаем:

Механическая часть электропривода моделируется интегратором спередаточной функцией вида
 , (3.15)
, (3.15)
где JΣ - суммарный момент инерции электропривода, включающий момент инерции ротора и момент инерции механизма, кг·м2.
Структура блока AD показана на рисунке 3.3.
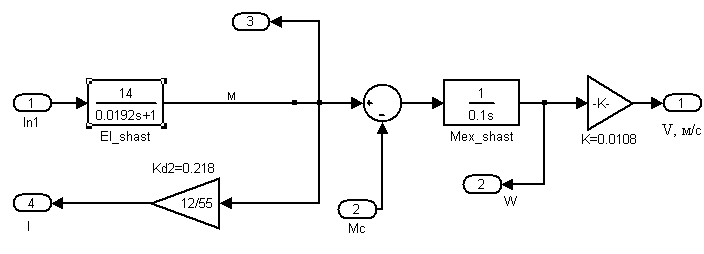
Рисунок 3.3 - Структурная схема асинхронного двигателя на линейной части механической характеристики
Коэффициент K=0,0108 на рисунке 14, находится из соотношения
 , (3.16)
, (3.16)
где ip - передаточное число редуктора;
Rк.ш. -радиус канатоведущего шкива, м.
и выполняет переход от угловой скорости электродвигателя ω, рад./с. к линейной скорости движения кабины V, м/с
3.2 Расчёт системы регулирования
Определение коэффициентов регуляторов.
Для контура регулирования тока без учёта влияния э.д.с. электродвигателя используется схема аналогового пропорционально - интегрального регулятора тока (ПИ-РТ). Передаточная функция регулятора [9,13]:
 , (3.17)
, (3.17)
где Т1- постоянная времени регулятора, с;
Трт=Тэ=0,0192 с.
Коэффициент усиления регулятора тока:
 , (3.18)
, (3.18)
где kп - коэффициент передачи преобразователя;
kд.т. - коэффициент передачи датчика тока;
Тпч - постоянная времени преобразователя, с.

Передаточная функция ПИ - регулятора тока.
 , (3.19)
, (3.19)
Коэффициент интегральной части регулятора Kирт=  =
=  .
.
Структурная схема регулятора показана на рисунке 3.4.
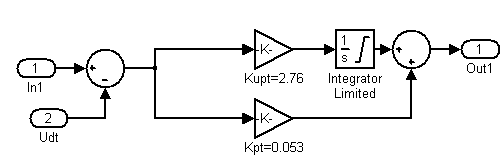
Рисунок 3.4- Внутренняя структура блока RT
Для высокой точности отработки изменений сигналов задания и абсолютной статической точности поддержания скорости при нагрузках на валу двигателя применяют двухконтурную систему с ПИД регулятором скорости. Передаточная функция ПИД - регулятора скорости: [13]
 , (3.20)
, (3.20)
Коэффициент пропорциональной части регулятора скорости:
 , (3.21)
, (3.21)

Коэффициент интегральной части регулятора:
 с.
с.
Постоянная дифференциальной части регулятора: 
Структура блока RS приведена на рисунке 3.5.
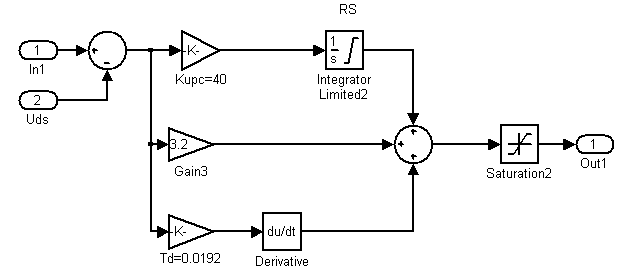
Рисунок 3.5 - Структурная схема ПИД - регулятора скорости
3.3 Расчёт задатчика интенсивности разгона
Разгон и торможение по S-характеристике позволяет предотвращать механические удары при пуске и останове механизма, а также контролировать рывок в момент включения привода. Структурная схема ЗИ показана на рисунке 16 [5,9]
Определяем постоянную интегрирования интегратора Ти2, с.
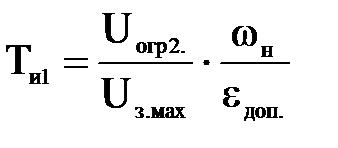 , (3.22)
, (3.22)
где εдоп. - допустимое ускорение привода, рад./с-2.
Допустимое значение линейного ускорения для всех лифтов, кроме больничных должно быть не более адоп.=2 м/с2. Примем это значение за требуемое. Найдём допустимое угловое ускорение электродвигателя по формуле
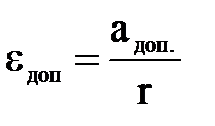 . (3.23)
. (3.23)
где r- радиус приведения механической части привода, м.
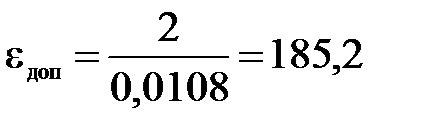 рад./с2
рад./с2

Постоянная интегрирования Т2, находится по формуле:
 , (3.24)
, (3.24)
где εдоп. - допустимое значение ускорения, с-2;
ρдоп. - допустимое значение рывка, с-3.
При рывке скорости ρ =3÷5 м/с3движение настолько спокойно и плавно, что пассажир почти его не ощущает. Принимаем среднее значение допустимого рывка не болееρ =4 м/с3
 с.
с.

Рисунок 3.6 - ЗадатчикS -образной кривой разгона. Внутренняя структура блока ZI.
После расчёта параметров задатчика, графики изменения скорости показаны на рисунке 3.8

Рисунок 3.7- Изменение скорости по S-образной кривой разгона
Не нашли, что искали? Воспользуйтесь поиском: