ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Сравнительная оценка тактико-технических и эксплуатационных показателей.
Для получения информации с целью создания баз данных по гидрофизическим полям используются более 100 научных и рыболовецких судов оборудованных соответствующими измерительными комплексами: а также специальные суда ВМФ типа TAGS-60 и подводные лодки.
В состав подводного комплекса TAGS-60 входят:
- измеритель магнитных полей;
- сейсмический профилограф;
- теряемые зонды;
- измеритель температуры поверхности;
- -СТД зонды;
- акустический доплеровский измеритель течений ADCP;
- многолучевая оптическая система;
- широкообзорный сонар для глубокой воды; ^
- широкообзорный сонар для мелкой воды;
- профилограф донных отложений.
Необходимость учитывать гидрофизические характеристики акваторий «in situ» для поиска и идентификации объектов на дне, а также при эксплуатации ПЛ, в том числе при решении задач обеспечения безопасности ПЛ и ее скрытности от обнаружения как по акустическим, так и неакустическим полям, очевидно, явилась мотивировкой разработки и начавшегося с 1994 г. внедрения на ПЛ ВМФ США автоматизированного комплекса освещения гидрофизической обстановки TOMS (Tactical Oceanographic Monitoring System).
Большое преимущество подводных лодок – это ее независимость от поверхностных условий. Даже самые отдаленные области глубокого арктического бассейна могут быть доступны на подводной лодке. Погруженная подводная лодка может собирать данные на скоростях до 25 узлов и глубинах до 800 футов. Подводная лодка разработана так, чтобы быть устойчивой, быстрой и тихой, делая ее идеальной платформой для геофизических исследований.
Океанографические датчики TOMS размещены высоко в хвостовой части ПЛ в специально изготовленном входном отверстии для морской воды, где они имеют доступ к водному потоку менее искаженному турбулентным пограничным слоем от корпуса. Стандартный набор датчиков включает в себя датчики температуры, электропроводности морской воды, концентрации хлорофилла, оптический коэффициента обратного рассеяния, а также датчик давления.
Аналого-цифровое преобразование сигналов с датчиков производится вне прочного корпуса ПЛ. Это сводит к минимуму электрические связи с датчиками через корпус и существенно сокращает источники внешних электрических шумов, которые могут создавать помехи слабым аналоговым сигналам датчиков.
1. Температура.,
Температура измеряется двумя датчиками: быстросрабатывающий стеклянный терморезистор с постоянной времени 20 мс и стеклянный терморезистор в металлическом корпусе с постоянной времени 120мс. Датчик быстрого реагирования позволяет регистрировать мелкомасштабные температурные изменения в воде, в то время как датчик с более медленной реакцией обеспечивает данные для вычисления основных характеристик среды, таких как плотность морской воды и скорость звука. Аналоговый сигнал с термистора сразу же преобразуется в цифровой с высокой частотой дискретизации, чтобы улучшить отношение сигнал/шум за счет высокой частоты оцифровки.
После оцифровки и учета калибровки датчика чувствительность температурного датчика определяется как 28x10-6 С/Гц1/2 в частотной полосе с шириной в 6 Гц. Выходные данные с металлизированного датчика получаются при 1 Гц.
2. Электропроводность морской воды.
Поскольку система должна работать длительное время в оперативных необслуживаемых условиях, используется незагрязняющийся, с четырьмя электродами, с плоской контактной ячейкой тип датчика, разработанный для океанографических буксируемых линий. Чувствительность датчика составляет 3-1010 (См/м)/Гц1/2 в полосе шириной 6 Гц.
3. Хлорофилл.
Датчиком хлорофилла является миниатюрный флюориметр. Флюориметр генерирует яркий, световой поток от высоковольтного галогенового источника с длиной волны 430 nm (длина волны поглощения хлорофилла- А), который проходит фиксированное расстояние в воде. Арсенид- фосфид- галлиевый фотодетектор воспринимает излучение с длиной волны 670 nm (длина волны эмиссионного излучения молекул хлорофилла) и выдает сигнал, пропорциональный уровню хлорофилла в воде.
4. Оптическое обратное рассеяние.
Разработан компактный подводный прибор для измерения голубого обратного рассеяния при частоте дискретизации в 1 Гц.
5. Давление.
Датчик давления обеспечивает точные данные о давлении морской воды независимо от глубины. Эти данные регистрируются и используются для согласования данных о глубине, полученных с корабельных датчиков, с датчиками TOMS.
В системе TOMS использованы три вида регистрации данных, разнесенные в пространстве и времени. Данные, используемые для реализации мониторинга в реальном масштабе времени регистрируются в записях данных дисплея с интервалом в 5 сек. (0.2 Гц). Параметры, регистрируемые с интервалом в 1с (1 Гц), сохраняются в корабельном регистраторе данных. Данные с датчиков высокого разрешения TOMS (температура, электропроводность, хлорофилл) регистрируются в фиксированных по длине записях данных с частотой 1 и 16 Гц.
Оптический дисковод размещен в центральном посту субмарины для использования в качестве главного архива данных, допускающего в реальном времени сбор данных и повторный вызов данных. Данные приблизительно за одну неделю могут быть размещены на каждой стороне оптического диска (~1 мегабайт данных за день). Второй оптический дисковод размещен в помещении акустического наблюдения, обеспечивая возможность просмотра ранее полученных данных без прерывания процесса сбора данных и управления дисплеем в центральном посту.
Прототип TOMS использует компьютер Apple Macintosh II CI как центральный процессор системы. Этот тип компьютера был выбран на основе его технических данных, высокой производительности графической подсистемы а также благодаря его маленьким габаритам (что облегчает его установку на борту ПЛ). Цветной графический принтер высокого разрешения обеспечивает на выходе получение твердых копий и управляется из центрального поста или из акустической рубки.
Блок-схема системы TOMS приведена на рисунке 6.2.

Рис. Блок-схема системы TOMS
В состав комплекса TOMS кроме датчиков гидрофизических полей входит акустическая станция SONAR 2081 для исследования характеристик рельефа дна.
Для прогнозирования гидрофизической обстановки в акватории необходимо располагать надежными данными об орографических характеристиках дна акватории и ее гидрофизических параметрах, включая характеристики временной сезонной изменчивости. По-видимому, систематические исследования арктических морей, предпринятые ВМС США с использованием ПЛА в 1994-е-2000 гг., также направлены на получение этих характеристик.
Программа SCICEX (Научные Арктические Экспедиции) основана на сотрудничестве между военно-морским флотом США и гражданскими учеными для исследования окружающей среды в Арктике. SCICEX – это 5 летних программ (с 1995 по 1999 г.), в которых научно-исследовательские экспедиции проводились на атомных подводных лодках класса Sturgeon военно-морского флота. Согласно этой программе были проведены исследования в северном Ледовитом океане на подводных лодках класса Sturgeon в 1995, 1996 и 1997 годах. Две дополнительные экспедиции были осуществлены в 1998 и 1999 годах. Продолжительность каждой экспедиции – около 80 дней с 40 - 45 днями работы в центральной области Северного Ледовитого океана.
Начиная с экспедиции в 1993 году, гражданские ученые совместно с персоналом ВМФ собирали информацию о геологии, физике, химии и биологии данного региона
Научная программа 1998 SCICEX (Scientific Ice Expeditions) была проведена на подводной лодке ВМС США Hawkbill продолжительностью 31 день с 1 августа по 1 сентября 1998 года, заключающаяся в проведении океанографических и геофизических исследований по всему Северному Ледовитому океану.
Программа SCICEX-98 была пятой экспедицией в ряде научных исследований, которые проходили в Северном Ледовитом океане, используя подводные лодки ВМС США как платформы. Программа имела много научных целей. Основная цель – продолжить исследования физических, химических и биологических изменений, происходящих в Северном Ледовитом океане, а также начать программу, характеризующую топографию дна Северного Ледовитого океана. Фиксирование физических, химических и биологических условий было осуществлено с использованием контрольно-измерительной аппаратуры, осуществляющей отбор проб и глубоководные океанографические исследования, проводимые на водной поверхности. Картографирование морского дна осуществлялось с помощью системы картографии, установленной на подводной лодке Hawkbill специально с этой целью.
В таблице приведены основные средства измерения, перечень измеряемых параметров и комментарии по работе контрольно-измерительной аппаратуры в течение исследований по программе SCICEX-98
Таблица
| Инструмент | Наблюдения | Комментарии |
| Установленный на рубке CTD зонд Seacats (2шт) | T, S, O2, Флюорометр (на № 1 Seacat), Фотометр (на № 2) | Непрерывные наблюдения |
| Акустический доплеровский профилометр потока (ADCP) | Излучение направлено вверх от палубы судна | Непрерывная работа Диапазон -200 м. |
| Цифровой гидролокатор верхнего обзора | Непрерывное изображение ледяного навеса | Работал периодически |
| Цифровая профилирующая система льда (DIPS III и II), | Измерения расстояния от льда до ПЛ | Непрерывные измерения |
| Установленная на рубке, обзорная видео камера (SRVS) | Видеоизображение ледяного навеса | Запись непрерывно только в течение ледяных исследований |
| Батиметрический гидролокатор бокового обзора (SSBS) | Изображение дна океана и батиметрия | |
| Профилометр дна с высокой разрешающей способностью (HRSP) | Регистрация осадочных пород дна | |
| Гравиметр Bell BMG-3 Gravitymeter | Область гравиметрии | Случайные скачки данных |
Кроме исследований, приведенных в таблице, в отчете упоминается отбор проб воды для измерения солености, концентрации растворенного кислорода, питательных веществ, концентрации озона, бария и пигментов фактически на всех участках работ. Дополнительные пробы отбирались для контроля изотопов Йод-129, Цезий -137 и для микробиологических исследований.
Ниже на рисунках показано размещение аппаратуры на Hawkbill

|
|
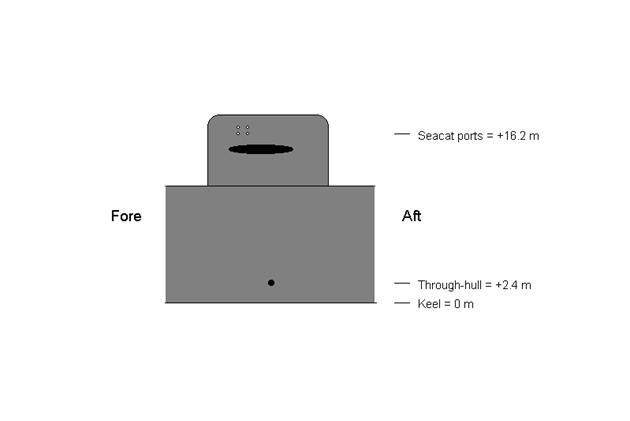 Рис. размещение CTD зондов Seacat на рубке Hawkbill
Рис. размещение CTD зондов Seacat на рубке Hawkbill

Рис Выделенное место для размещения аппаратуры

|

|

рис Расположение ГБО и донного профилографа на Hawkbill

Рис. Изображение дна на экране ГБО
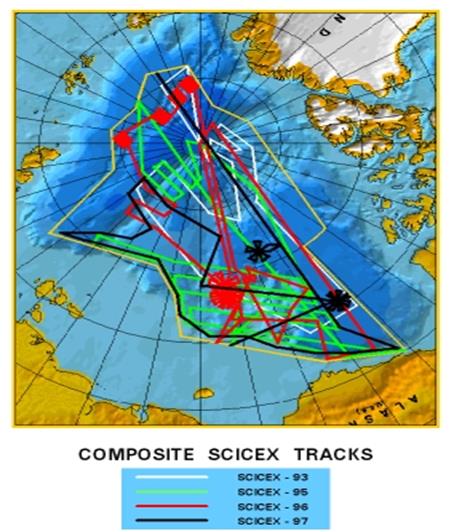
Рис. Маршруты экспедиций в 93, 95-97 годах

рис. Отбор проб воды

Рис. Фильтрация проб

Рис. Работа микробиолога

Рис. Общий вид отсека с исследовательской аппаратурой

Рис. большое число ручных операций
Как исследовательскую ПЛ следует упомянуть атомную подводную лодку созданную в США для инженерных и научно-исследовательских работ.
Общие характеристики
| Первичная Функция: | Глубоководное научно-исследовательское и инженерное средство |
| Изготовитель: | General Dynamics (Electric Boat Division) |
| Бортовой номер: | NR-1 |
| Класс: | Нет класса; это - единственное в своем роде судно |
| Дата создания: | 27 октября 1969 г. |
| Двигатель: | один ядерный реактор, один турбогенератор переменного тока (турбоальтернатор); два (внешних) двигателя, два моторных винта, четыре двигателя реактивной системы управления (два горизонтальных, два вертикальных) |
| Длина: | 147 футов (44,8 м) |
| Ширина: | 12 футов (4,18 м) |
| Водоизмещение: | 380 т (в надводном положении), 700 т (под водой) |
| Глубина погружения: | максимум 2 375 футов (724 м) |
| Команда: | 2 офицера, 3 военнослужащих, 2 ученых |
| Вооружение: | Нет |
Описание
NR-1 изначально была построена как платформа для малых атомных двигателей, однако дополнительно предусматривала возможность глубоководного погружения. Это первое глубоководное судно для погружения, использующее атомную энергию. Ее проект был заложен 10 июня 1967 г., NR-1 спущена в Gordon 25 января 1969 г. и успешно завершила первые свои испытания 19 августа 1969 г. Лодка реконструирована в 1993 году, в результате чего была изменена носовая часть, которая увечила ее длину до 2,88 м, установлены новые гидролокаторы и видеокамеры.
NR-1 испытывалась как средство для подводного поиска, извлечения объекта на поверхность, геологического обследования, океанографического исследования, а также для установки и обслуживания подводного оборудования на глубинах до пол мили (926 м) [2].
В ее состав входят: 3 иллюминатора, приборы внешнего освещения и съемки, неподвижные камеры для цветной фотографии, захватные устройства клешневого типа для извлечения объектов, манипулятор, который может быть оснащен различными захватывающими и режущими инструментами, и рабочая корзина, которая может использоваться совместно с манипулятором, чтобы выносить и возвращать предметы в море. Внешнее (поверхностное) наблюдение обеспечивается с помощью телеперископа, установленного на мачте в области паруса [1, 2].
NR-1 оборудована электронной и компьютерной аппаратурой, которая отвечает за навигацию, систему связи, поиск и идентификацию объекта. Лодка может маневрировать или быть неподвижной, удерживая устойчивую позицию, залегать на морское дно или на подводные горные хребты, обнаруживать и распознавать объекты на большом расстоянии, а также поднимать объекты со дна океана [1, 2]. Гидролокатор бокового обзора может просматривать площадь 4х4 мили [2].
NR-1 обладает способностью двигаться под водой со скоростью около 4 узлов достаточно длительное время, ограниченное только собственными энергоресурсами. Лодка может картографировать рельеф дна океана, изучать информацию о температуре, течениях и другой информации для военных, коммерческих и научных целей. С 11 членами экипажа лодка может находиться под водой 30 дней [2].
Как правило, при проведении исследовательских работ на отдаленных расстояниях NR-1 буксируется до и от места исследования обслуживающим судном, которое также способно проводить исследования совместно с подводной лодкой [1, 2].
После крушения космического челнока Challenger в 1986 г., NR-1 использовался для поиска, идентификации и извлечения важных частей космического корабля. Лодка была основным судном для поиска в глубоководных участках. NR-1 продолжал подводные работы даже в сложных погодных условиях и при сильном волнении, когда остальные поисковые судна вынуждены были возвращаться в порт [2].
Сегодня NR-1 продолжает обслуживать ВМФ США и большое количество исследовательских и образовательных учреждений.
Источники
1. сайт www.promare.ru.
2. журнал Ocean news & technology, март/апрель, 2006.
| <== предыдущая лекция | | | следующая лекция ==> |
| Проект (Ваап IV Project). Обеспечивает комплексное управление одновременно несколькими проектами и их оценку. | | | Обзор десятого каталога 2016 |
Не нашли, что искали? Воспользуйтесь поиском: