ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
ПРОЦЕССА МОРСКОГО СУДОВОЖДЕНИЯ
С точки зрения науки «судовождение - единый процесс, обеспечивающий плавание и управление судном для достижения намеченных целей».
Известно, что цели торгового, промыслового, научного и военного мореплавания различны. Однако требования к обеспечению безопасности мореплавания едины, а общая задача судовождения универсальна. Навигационная безопасность плавания — непременное условие решения любой задачи мореплавания, а общая задача судовождения кратко формулируется так: «провести судно из одного пункта в другой по заранее намеченному, безопасному и наивыгоднейшему пути». Под безопасным и наивыгоднейшим путем понимается такой, при котором судно прибудет в пункт назначения в кратчайший или назначенный срок с наименьшим расходом топлива (энергоресурса) и других запасов, а также с наименьшим риском встречи с навигационными опасностями, с другими судами и опасными гидрометеояв-лениями.
С позиции теории управления процесс морского судовождения (решения основной задачи судовождения) протекает в системе, простейшая структура и связи которой могут быть описаны моделью, показанной на рис. 6.1. Система включает следующие основные звенья и узлы:
— командное или управляющее звено;
— два измерительных звена;
— исполнительное звено;
- объект управления, т.е. судно;
- средства наблюдения, навигации, связи и управления;
- внешнюю среду, включая навигационные, гидрометеорологические условия и обстановку плавания.
Известно, что под управлением принято понимать процесс целенаправленной переработки информации состояния объекта в информацию командную.
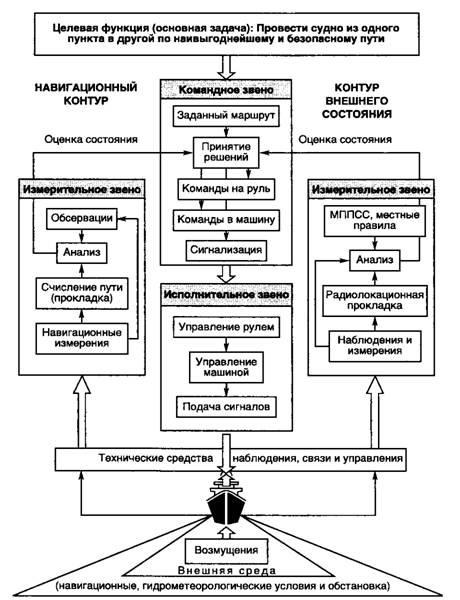
Рис.6.1. Системно-информационная модель процесса морского судовождения
Состояние объекта (судна) характеризуется навигационной информацией. В отличие от одноименной информации по НАВИМ, НАВИП, НАВАРЕА под «навигационной информацией» понимается информация о положении и перемещении судна в определенной системе координат. Такими координатами в морской навигации могут быть: географические координаты (φ — широта и λ — долгота), маршрутные координаты (z — поперечное и х— продольное смещения судна относительно условной расчетной точки на маршруте), полярные координаты (П — пеленг и Д — дистанция до опасного объекта или ориентира). Командная информация — это команды по сохранению или изменению направления и скорости движения судна, т.е. команды на руль, в машину и на подачу установленных правилами плавания сигналов (в частности по МППСС).
Информация состояния объекта (судна) может выступать в явном виде (точка на навигационной карте, ситуация сближения на вторичном индикаторе САРП, визуально наблюдаемое положение судна относительно плавучих средств ограждения на фарватере и т.п.) и в неявном виде (навигационные параметры, измеренные для определения места судна, элементы счисления пути для ведения навигационной прокладки, пеленг и дистанция до обнаруженного объекта и т.п.). В первом случае информация непосредственно позволяет дать оценку состоянию объекта, во втором случае для достоверной оценки состояния требуется производство измерений, расчетов, графических построений и пр., т.е. обработка информации. Функции обработки информации в модели на рис. 6.1 выполняют измерительные звенья. При определенном совершенстве и самостоятельности измерительные звенья не только преобразуют информацию из неявного вида в явный, т.е. дают оценку состояния, но и вырабатывают рекомендации или предложения для принятия решения командным звеном. Эта информация поступает в командное звено по обратным связям и является в большинстве случаев результатом обработки измерений, полученных с помощью технических средств наблюдения и навигации.
Командное звено, сопоставляя оценки состояния объекта управления, выработанные измерительными звеньями с заданными или необходимым состоянием (положение судна на маршруте, по месту, времени и относительно опасностей), принимает решение на сохранение или изменение текущего состояния, т.е. вырабатывает законы управления судном по направлению и скорости движения. По принятию решения исполнительному звену выдаются определенные команды: на руль, в машину, на подачу сигналов. Командная информация поступает на исполнительное звено по прямым связям.
Функции исполнительного звена состоят в точном и своевременном исполнении команд, их репетовании и докладах об исполнении (частные обратные связи). Исполнительное звено воздействует на привод руля и органы управления движителями для сохранения или изменения параметров движения (заданного состояния объекта). Наиболее точная и достоверная информация об исполнении команд поступает на командное звено вновь по общим каналам обратной связи через измерительные звенья.
На модели прослеживаются два контура управления: навигационный контур И контур внешнего наблюдения. Первый дает оценку состояния объекта относительно заданного маршрута и неподвижных, не наблюдаемых визуально или техническими средствами навигационных опасностей. Обработка информации в навигационном контуре осуществляется применением основных методов морской навигации: счисления пути, определения места судна, оценки точности измерений и расчетов на основе данных, получаемых с помощью технических средств навигации.
Контур внешнего наблюдения дает оценку состояния объекта относительно заданного маршрута, если он обозначен на местности (ведущий створ, огражденный фарватер и т.п.), а также наблюдаемых визуально навигационных опасностей и подвижных объектов. В нем преобладает лоцманский метод судовождения, базирующийся на совокупности глазомерных способов оценки навигационной информации, выработанных хорошей морской практикой, интуиции и искусстве мореплавания. Для количественной оценки наблюдений при нормальной видимости и для непосредственного наблюдения обстановки в условиях ограниченной видимости применяются технические средства наблюдения: радиолокационные станции (РЛС), аппаратура автоматической идентификационной системы (АИС), эхолоты, бинокли. Информация от РЛС и АИС проявляется, как правило, в неявном виде, поэтому нуждается в обработке, для чего применяются методы радиолокационной прокладки или системы ее автоматизации (САРП).
Навигационные, гидрометеорологические условия и обстановка - понятия известные и особых разъяснений не требуют. Возмущение внешней среды - это воздействие на судно воздушных и водных масс (ветра, течений, волнения, приливно-отливных явлений). Невыполнение каким-либо звеном своих функций ведет к срыву процесса управления, в итоге — к созданию предаварийной ситуации, т.е. необеспечению безопасности плавания и невыполнению судном своего предназначения.
Настоящая модель применима для анализа процесса судовождения любых морских судов независимо от размерений, назначения, степени оборудования техническими средствами и количества командного и рядового состава ходовой вахты.
Не нашли, что искали? Воспользуйтесь поиском: