ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Тақырыбы: Жүйенің кинематикалық параметрлерін динамиканың жалпы теңдеуін қолданып анықтау
Есептің шарты: Механикалық жүйе: біртекті сатылы 1 және 2 шкивтерінен;
3 және 4 жүктерінен және салмақсыз блоктардан, өзара жіппен қосылған, 6 - суретте көрсетілгендей орналасқан. Жүйе тік жазықтықта ауырлық күші әсерінен және М жұп күш моменті әсерінен қозғалады. Шкив сатыларының радиустері R1=0,2см, r1 =0,1м,
R2 =0,3см, r2 =0,15м. Шкивтің инерция радиусы ρ 1=0,1м; ρ2=0,2 м.
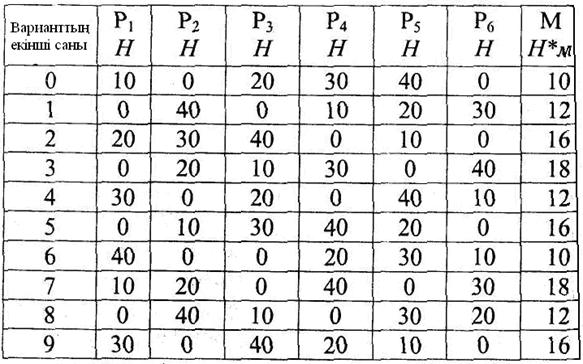
Үйкеліс күшін ескермей салмағы үлкен жүктің үдеуін анықтау керек. Варианттар үшін есептеуге қажетті берілгендер 6 – кестеде келтірілген.
Салмағы нольге тең жүктерді есептеу схемада көрсетпеуге болады. 1 және 2 шкифтерді есептеу схемада міндетті түрде көрсету керек, себебі олар жүйенің қозғалысына әсер етеді.
Динамиканың жалпы теңдеуінің математикалық өрнегі:
 ie + iu=0 (1)
ie + iu=0 (1)
мұндағы, ie – сыртқы (актив) күштерінің элементар жұмыстарының қосындысы,
iu - инерция күштерінің элементар жұмысы.
1-ші теңдеудің құраушылары: δA(F)=F δS (2)
δA(M) =Mδφ (3)
мұндағы δS- элементар орын ауыстыру.
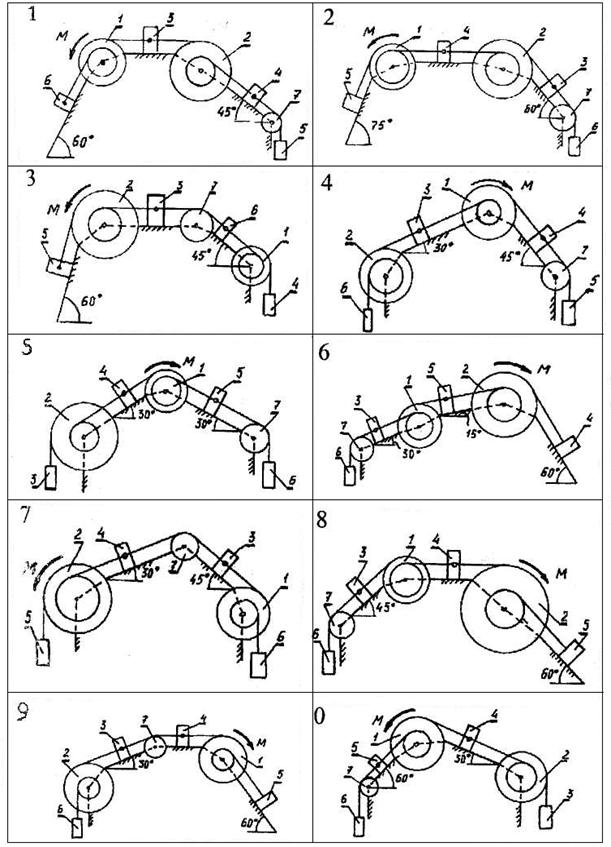
Сурет 6. №6 есебінің схемасы
Кесте 6
№6 есебінің варианттарының берілгені
№6 есебіне мысал
Есептің шарты: Механикалық жүйе: біртекті сатылы 1, 2 шкивтерінен және
6.1-суретте көрсетілгендей өзара жіппен қосылған 3 және 4 жүктерінен тұрады.
Шкив сатыларының радиустері R1=0,2см, r1 =0,1м, R2 =0,3см, r2 =0,15м.
Шкивтің инерция радиусы ρ 1=0,1м; ρ2=0,2 м. Шкивтердің және жүктердің ауырлық күштері: P1=0; P2=30 H; P3=40 H;P4=20 H. Бірінші шкивке M=16 H∙м жұп күш моменті түсірілген.
Үйкелісті ескермей (жүйедегі үлкен салмақты) 3 жүктің үдеуін анықтау керек.

Сурет 6.1. №6 есептің мысалына есептеу схемасы
Шешуі:
1. Берілген схемада P2; P3; P4 сыртқы күштерді және М жұп күш моментін көрсетеміз.
2. 3-ші жүк а3 үдеуімен көлбеу жазық бойымен төмен бағытта қозғалады деп, суретте оның векторлық бағытын көрсетеміз.
3. 4-ші және 2 звенолардың үдеулерінің бағытын 3-шы звеноның үдеуін ескере отырып, жүйенің кинематикалық байланыстарына қарай бағыттаймыз. 1 звено массасы болмағандықтан үдеуін анықтауды қажет етпейді.
4. Звенолардың F3u, F4u инерция күштерін және М2и инерция моментін сәйкесінше үдеулерге қарсы бағыттаймыз.
5.Жүйеге мүмкін болатын δS3 элементар орын ауыстыруын береміз, ол өз кезегінде басқа звенолардың орын ауыстыруына әсер етеді: δφ2; δS4; δφ1 . Орын ауыстырудың қатынастары кинематикалық байланыстар арқылы анықталады.
6. Жүйе денелеріне әсер етуші инерция күштерін және жұп күш инерция моментін келесі формула бойынша анықталады:
Fи=ma; Ми=I∙E=mρ2∙E
Олай болса,


Осы өрнектегі а4 және Е2 бұрыштық үдеулерін 3 звеноның а3 үдеуі арқылы өрнектейік.

олай болса,



Cондай - ақ звенолардың элементар орын ауыстыруын 3-шы звеноның орын ауыстыруы арқылы өрнектейміз.



7. Жалпы әдістің 2 және 3 теңдеуі бойынша жүк денелерінің элементар жұмыстарын анықтаймыз:





Р2 және Р4 күштерінің элементар жұмыстары 0-ге тең, себебі ол күштер жүйеге әсер етпейді.
8. Элементар жұмыстарды 1-ші теңдеуге қойып түрлендіріп алатынымыз:

 тең емес екенін ескеріп, жақша ішіндегі өрнектерді 0-ге теңестіреміз:
тең емес екенін ескеріп, жақша ішіндегі өрнектерді 0-ге теңестіреміз:

Алынған теңдеуді а3 қатысты шешу арқылы табатынымыз:

«теріс» таңба шығуы 3 звено үдеуінің бағыты схемада көрсетілген бағытқа қарама – қарсы, яғни жүйе денелерінің қозғалысы үдемелі емес, керісінше кемімелі екендігін білдіреді.
Есеп №7
Не нашли, что искали? Воспользуйтесь поиском: