ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Экспериментальные исследования математической модели ДР
Моделирование датчика СИРТ осуществлялось поэтапно, чтобы проверить работоспособность каждого отдельного блока схемы и убедиться в правильности ее построения. Разработка схемы в среде NI Multisim осуществлялась согласно электрической схеме рис. 5 и выбранной элементной базе. Имитация прохождения шарика осуществлялась путем включения и выключения ключа.
Для питания мостового измерительного трансформатора переменным током используем генератор постоянной частоты. Настраиваем его на выдачу синусоидальных импульсов с частотой 25 кГц. Таким образом, генератор постоянной частоты на выходе обеспечит сигнал, показанный на рис. 11.

Рисунок 11 – Ток генератора постоянной частоты
Мостовой измерительный трансформатор настраивается так, что внесенные в магнитную систему потери переводят его из одного равновесного состояния в другое. При этом мостовая схема каждый раз проходит состояние равновесия при входе и при выходе шарика из зоны действия. При прохождении положения равновесия моста фаза несущей частоты разностного сигнала меняется на 180° (π). В случае, когда шарик находится в зоне действия мостового измерительного трансформатора, комплексное сопротивление первой выходной обмотки мостового измерительного трансформатора меньше, чем комплексное сопротивление второй выходной обмотки. В случае же, когда шарик находится вне зоны действия мостового измерительного трансформатора, комплексное сопротивление первой выходной обмотки мостового измерительного трансформатора больше, чем комплексное сопротивление второй выходной обмотки. Это хорошо видно на рис. 12.
На рис. 13 представлен ток сигнала разности. Вне зоны действия шарика комплексное сопротивление первой обмотки выходной диагонали моста больше, поэтому фаза сигнала разности совпадает с фазой тока второй обмотки. А в зоне действия шарика комплексное сопротивление второй обмотки больше, чем первой, поэтому фаза сигнала разности изменяется на 180° и совпадает с фазой тока первой обмотки выходной диагонали моста.
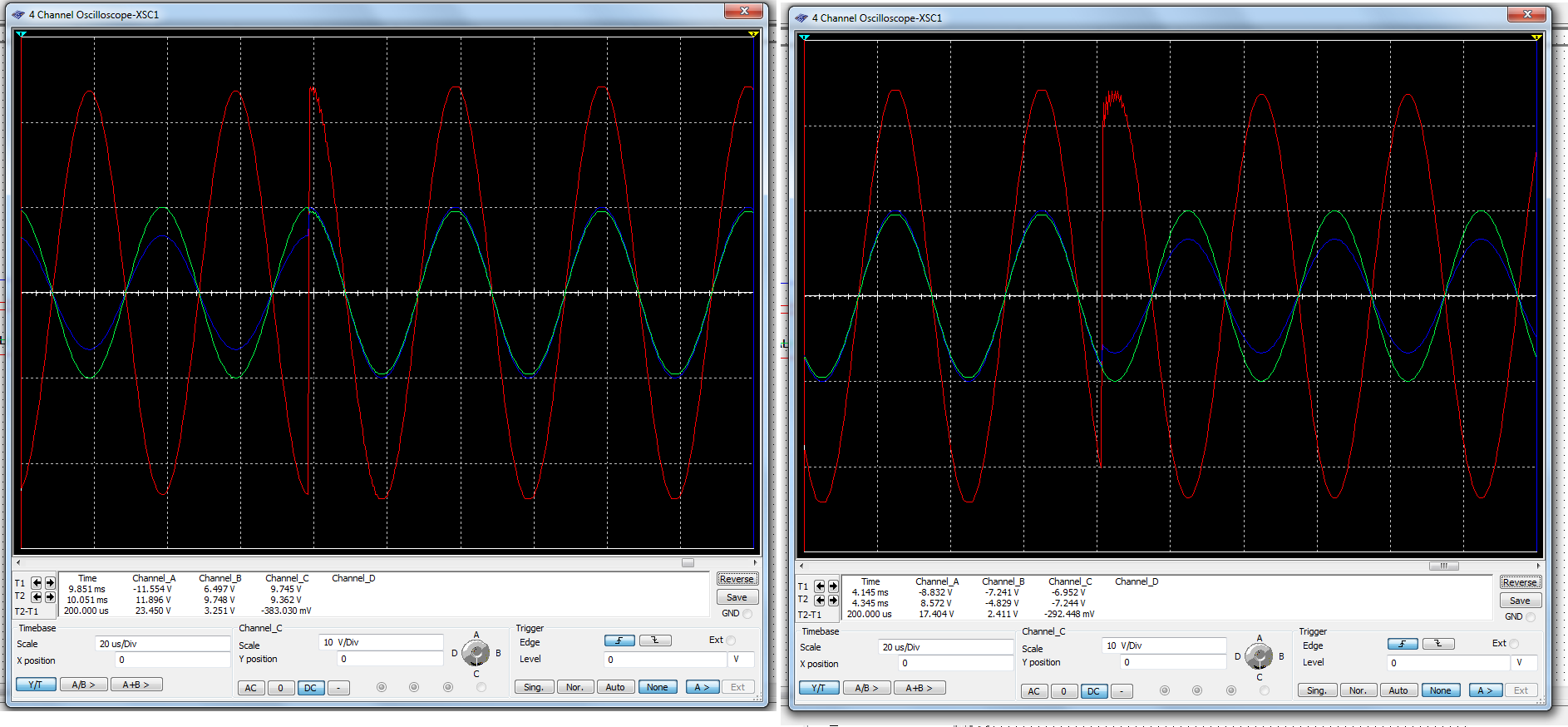
Рисунок 12 – Плечевые токи и ток сигнала разности

Рисунок 13 – Ток сигнала разности
Далее синусоидальные сигналы преобразуются в дискретные с помощью амплитудных компараторов. Если амплитуда синусоидального сигнала положительна, то это соответствует логической единице. Если амплитуда синусоидального сигнала отрицательна, то это соответствует логическому нулю. Согласно рис. 14 ток генератора постоянной частоты в первом амплитудном компараторе преобразуется в последовательность опорных импульсов.
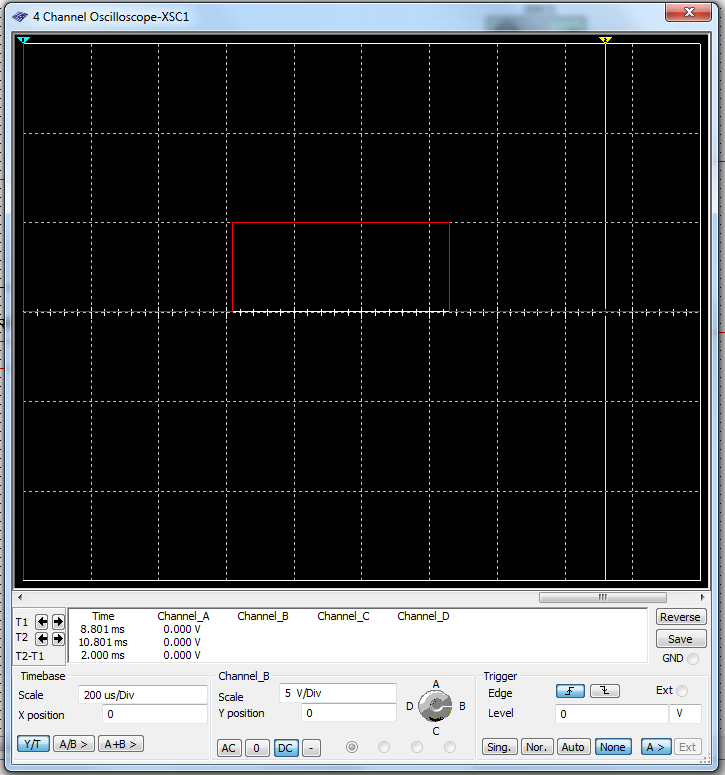
Рисунок 14 – Ток опорных импульсов
На рис. 15 ток сигнала разности во втором амплитудном компараторе, показанный синим цветом, преобразуется в последовательность импульсов разности. При этом относительно последовательности прямоугольных опорных импульсов последовательность прямоугольных импульсов сигнала разности сдвинута по фазе на 90°. Эти две последовательности содержат информацию о фазах входных аналоговых сигналов.

Рисунок 15 – Токи опорных импульсов, импульсов разности и импульсов счета
Для сравнения фаз с выходов амплитудных компараторов последовательности поступают на входы динамического D-триггера. На D-вход динамического D-триггера подается последовательность импульсов сигналов разности, которая содержит информацию о фазе сигнала разности, а на счетный вход динамического D-триггера – последовательность опорных импульсов, которая содержит информацию о фазе сигнала генератора постоянной частоты. Из рис. 15 видно, что переднему фронту опорного импульса соответствует скважность последовательности импульсов сигнала разности, т.е. состояние логического нуля. Результатом сравнения фаз последовательностей прямоугольных импульсов является состояние логического нуля, показанного на рис. 15 зеленым цветом. Результат сравнения фаз по переднему фронту импульса фиксируется в триггере в виде логического нуля и на каждом опорном импульсе генератора постоянной частоты. При выходе шарика из зоны действия импульс разности принимает значение логической единицы. Следовательно, с очередным опорным импульсом импульс счета принимает значение логической единицы.
На рис. 16 и рис. 17 еще раз наглядно продемонстрированы полученные графики.

Рисунок 16 – Ток сигнала разности, плечевые токи и ток импульсов счета
 Рисунок 17 – Ток сигнала разности, плечевые токи и ток импульсов счета
Рисунок 17 – Ток сигнала разности, плечевые токи и ток импульсов счета
Выводы
Таким образом, по результатам моделирования подтверждается возможность осуществления работы устройства измерения комплексного сопротивления мостовой схемы с использованием фазового метода, который имеет гораздо больший запас устойчивости по сравнению с методом амплитудной модуляции полезного сигнала датчика. Моделирование показало, что временные диаграммы функционирования устройства на рис. 4 практически полностью совпадают с диаграммами, полученными в результате разработки и тестирования в среде моделирования NI Multisim .
Заключение
В данной работе:
1) проанализированы различные методы измерения расхода топлива и выявлены их недостатки;
2) рассмотрен принцип действия датчика, находящегося в зоне воздействия механических нагружений на чувствительный элемент, основанный на внесении потерь в магнитный чувствительный элемент датчика металлическим шариком, вращающимся в полости магистрали подачи топлива к двигателям;
3) разработан метод измерения фазы несущей частоты полезного сигнала, исключающий влияние механических нагружений на чувствительный элемент датчика и, соответственно, повышающий точность измерения количества топлива;
4) разработаны функциональная и электрическая принципиальная схемы ДР, предназначенного для измерения количества окислителя и горючего, израсходованных двигателями коррекции и двигателями ориентации транспортного пилотируемого корабля;
5) разработана математическая модель ДР и произведены экспериментальные исследования данной модели;
6) по результатам моделирования подтверждена работоспособность ДР, реализованного на разработанном методе фазовой модуляции полезного сигнала датчика;
7) подтверждена новизна путем подачи заявки на предполагаемое изобретение;
8) достигнуто снижение гарантийных запасов топлива путем повышения точности измерения расхода.
Не нашли, что искали? Воспользуйтесь поиском: