ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Самохід виконавчих двигунів
Самоходом виконавчого двигуна називають явище обертання ротора при відсутності керуючого сигналу. При наявності самоходу двигун втрачає керованість і не може використовуватись як виконавчий.
Вимога відсутності самоходу в основному стосується асинхронних виконавчих двигунів, оскільки двигуни постійного струму звичайно самоходу не мають.
В асинхронному виконавчому двигуні найбільша асиметрія магнітного поля виникає при відсутності сигналу керування, тобто при однофазному вмиканні. Розкладаючи пульсуюче поле на пряме й зворотне, можливо одержати пряму  та зворотну
та зворотну  складові регулюючого обертаючого моменту:
складові регулюючого обертаючого моменту:
 .
.

Рис. 10.4. Моменти при однофазному вмиканні двигуна зі звичайним ротором
В однофазному двигуні пусковий результуючий момент  =0, але при
=0, але при  M рез ≠ 0(рис. 10.4) в досить широкому діапазоні ковзань. Тому, якщо роторові надати обертання, то такий двигун буде обертатись зі швидкістю n = const.
M рез ≠ 0(рис. 10.4) в досить широкому діапазоні ковзань. Тому, якщо роторові надати обертання, то такий двигун буде обертатись зі швидкістю n = const.
Щоб двигун не втрачав керованості і зупинявся в однофазному режимі, необхідно, щоб при 
 . Така умова виконується при
. Така умова виконується при  Самохід повністю виключається при
Самохід повністю виключається при  (рис.10.5).
(рис.10.5).
Розрізняють параметричний та технологічний самохід. Параметричний самохід обумовлений малим активним опором ротора, тому ротор в асинхронних виконавчих двигунах виготовляється з підвищеним активним опором.

Рис. 10.5. Моменти асинхронного двигуна з підвищеним активним опором ротора
Це зменшує ККД виконавчого двигуна, але гарантує його керованість і наближає механічні характеристики до прямолінійних. При цьому  .
.
Технологічний самохід викликаний створенням паразитних короткозамкнених витків у магнітному ланцюзі або обмотці. Тому повинна ставитись підвищена вимога до якості технологічних операцій при виготовленні виконавчих двигунів.
Швидкодія
Час розгону виконавчого двигуна визначається, перш за все, електромеханічними перехідними процесами, оскільки електромагнітні перехідні процеси проходять значно швидше. Електромеханічна стала часу  майже на порядок більша від електромагнітної сталої часу
майже на порядок більша від електромагнітної сталої часу  Якщо статичний момент на валу
Якщо статичний момент на валу  , то з основного рівняння динаміки двигуна
, то з основного рівняння динаміки двигуна
одержимо
 (10.1)
(10.1)
Стала часу може визначатись з різних вихідних умов. Цю величину розуміють як час, на протязі якого швидкість обертання ротора двигуна досягла б усталеного значення, якби у процесі розгону ротор прискорювався б під дією незмінного обертаючого моменту. У зв'язку з цим величина виходить різною в залежності від початкових умов її визначення: чи виходять з номінального моменту  , пускового
, пускового  або максимального
або максимального  . Тому поняття є умовним. У зв'язку з цим інколи користуються для оцінки тривалості електромеханічних перехідних процесів при пуску або реверсі двигуна поняттям часу його розгону до усталеної швидкості обертання.
. Тому поняття є умовним. У зв'язку з цим інколи користуються для оцінки тривалості електромеханічних перехідних процесів при пуску або реверсі двигуна поняттям часу його розгону до усталеної швидкості обертання.
Величину найчастіше визначають за пусковим моментом . Точні аналітичні рівняння для визначення сталої часу та тривалості процесу  є дуже громіздкими у зв'язку з нелінійністю механічних та регулювальних характеристик. Тому ці характеристики при практичних розрахунках лінеаризують.
є дуже громіздкими у зв'язку з нелінійністю механічних та регулювальних характеристик. Тому ці характеристики при практичних розрахунках лінеаризують.
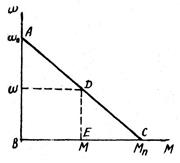
Рис. 10.6. Лінеаризована характеристика двигуна
Будемо виходити з лінеаризованої характеристики  ідеалізованого двигуна (рис.10.6). Оскільки
ідеалізованого двигуна (рис.10.6). Оскільки
 ~
~  ,
,
визначається моментом двигуна:
 (10.2)
(10.2)
Підставляючи в (10.2) з (10.1), одержимо:
 , (10.3)
, (10.3)
де електромеханічна стала часу
 (10.4)
(10.4)
Після інтегрування й перетворювань з рівняння (10.3):
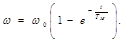 (10.5)
(10.5)
За формулою (10.5) будується графік ω(t), наведений на рис.10.7.
Рис. 10.7. Процес розгону двигуна
У зв'язку з тим, що в процесі розгону момент М зменшується, час розгону  . Якщо
. Якщо  , то
, то

Таким чином, залежить від  та
та  . Для асинхронних виконавчих двигунів
. Для асинхронних виконавчих двигунів
 .
.
Тому зростає зі збільшенням моменту інерції J та частоти  і зменшується зі зростанням числа пар полюсів p та пускового моменту (10.4). Двигуни, які розраховані на роботу з підвищеною частотою, не дивлячись на багатополюсність, мають більшу , ніж двигуни з частотою 50 Гц. У табл. 10.1 для порівняння наведені сталі часу для різних двигунів.
і зменшується зі зростанням числа пар полюсів p та пускового моменту (10.4). Двигуни, які розраховані на роботу з підвищеною частотою, не дивлячись на багатополюсність, мають більшу , ніж двигуни з частотою 50 Гц. У табл. 10.1 для порівняння наведені сталі часу для різних двигунів.
Таблиця 10.1 Електромеханічні сталі часу виконавчих двигунів.
| Тип асинхронного виконавчого двигуна | , с
| Тип виконав-чого двигуна постійного струму |
, с
| ||||||
| f=50 Гц | f=400 Гц | ||||||||
| 1.3 порож-нистим немагнітним ротором | 0.005-0.05 | 0.015-0.2 | 4. З якорем зви-чайної конструк- ції | 0.05-0.15 | |||||
| 2. З більчиною кліткою | 0.15-0.2 | 0.15-0.5 | 5. З порожнис-тим та безпазо-вим якорем | 0.015-0.02 | |||||
| 3. З порожнистим сталевим ротором | 0.2-1.0 | 0.3-3.0 | 6. З дисковим якорем та печатною обмоткою | 0.01-0.015 | |||||
Не нашли, что искали? Воспользуйтесь поиском: