ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Принцип дії двофазного виконавчого асинхронного мікродвигуна
В якості виконавчих досить часто використовують двофазні асинхронні двигуни. Вони мають на статорі дві обмотки, зсунуті у просторі: збудження З, яка знаходиться постійно під напругою, та керування К. Ротор порожнистий або короткозамкнений (рис. 11.1, а).

а)

б)
Рис. 11.1. Схема вмикання (а) та магнітні поля (б) двофазного асинхронного двигуна
Обертове магнітне поле створюється взаємодією МРС  та
та  за наявністю просторового та часового зсуву між ними й рівності їх амплітудних значень. Порушення будь-якої з цих умов призводить до еліптичного поля, тобто, кінець вектора магнітного потоку Ф при обертанні описує не коло, а еліпс (рис.11.1, б). При цьому потік та обертаючий момент змінні. Тому еліптичне поле створює менший середній за оберт момент
за наявністю просторового та часового зсуву між ними й рівності їх амплітудних значень. Порушення будь-якої з цих умов призводить до еліптичного поля, тобто, кінець вектора магнітного потоку Ф при обертанні описує не коло, а еліпс (рис.11.1, б). При цьому потік та обертаючий момент змінні. Тому еліптичне поле створює менший середній за оберт момент  , ніж колове.
, ніж колове.
Розкладаючи еліптичне поле на пряму та зворотну складові, приходимо до висновку, що пряме поле створює обертовий момент  , а зворотне – гальмівний
, а зворотне – гальмівний  . Зі збільшенням еліптичності зростає магнітний потік
. Зі збільшенням еліптичності зростає магнітний потік  та момент . Зменшення результуючого моменту
та момент . Зменшення результуючого моменту  призводить до зменшення швидкості обертання ротора.
призводить до зменшення швидкості обертання ротора.

Рис. 11.2. Застосування методу симетричних складових при регулюванні кута між векторами напруг
Якщо кут між векторами ЕРС β=0 (рис.11.2), або просторовий кут γ=0 (рис. 11.1), або =0 чи =0, поле стає пульсуючим, =0, кутова швидкість обертання ротора ω=0. Для пульсуючого поля  .
.
Якщо поле колове, то напруга керування, зведена до обмотки збудження:
 ,
,
де коефіцієнт трансформації
 (11.1)
(11.1)
 - числа витків збудження та керування відповідно
- числа витків збудження та керування відповідно
 - обмоткові коефіцієнти обмоток збудження та керування.
- обмоткові коефіцієнти обмоток збудження та керування.
При γ=90º від асиметрії МРС можливо перейти до асиметрії напруг  та
та  . Якщо поле еліптичне, то при складанні рівняння для електромагнітного моменту
. Якщо поле еліптичне, то при складанні рівняння для електромагнітного моменту  можливо скористатись методом симетричних складових стосовно двофазних систем. В цьому випадку можна використати метод розрахунку асинхронних двигунів, розроблений у загальному курсі електричних машин.
можливо скористатись методом симетричних складових стосовно двофазних систем. В цьому випадку можна використати метод розрахунку асинхронних двигунів, розроблений у загальному курсі електричних машин.
За цим методом несиметрична двофазна система векторів та (рис. 11.2) розкладається на дві симетричні системи, кожна з яких складається з векторів, однакових за величиною та зсунутих між собою на кут 90 º. Система векторів прямої послідовності  має таке ж чергування фаз, що й початкова система. Вектори зворотної послідовності
має таке ж чергування фаз, що й початкова система. Вектори зворотної послідовності  мають протилежне чергування фаз. Цьому відповідає система рівнянь
мають протилежне чергування фаз. Цьому відповідає система рівнянь
 (11.2)
(11.2)
З системи рівнянь (11.2) визначаємо:
 (11.3)
(11.3)
 (11.4)
(11.4)
11.2. Конструктивна будова асинхронних виконавчих двигунів
З вимог, яким повинен відповідати виконавчий двигун, витікає, що, стосовно асинхронних виконавчих двигунів, не тільки відсутність самоходу, але й забезпечення широкого стійкого регулювання швидкості й лінійності механічних характеристик, пов'язані зі збільшенням активного опору ротора. Ця вимога може бути здійснена двома шляхами. По-перше, можливо застосувати звичайний короткозамкнений ротор, складений з листової сталі, який має обмотку у вигляді білячої клітки, якщо стрижні й кільця клітки виконати з матеріалу з підвищеним активним опором (латунь, бронза). Конструкція такого двигуна не відрізняється від конструкції нормальної асинхронної машини.
У зв'язку з підвищеним активним опором ротора значно збільшуються електричні втрати й зменшується корисна електрична потужність двигуна. Тому номінальна потужність асинхронних виконавчих двигунів у 2-3 рази менша, ніж звичайних короткозамкнених двигунів з такими ж габаритами.
Недоліком виконавчих двигунів з ротором у вигляді білячої клітки є порівняно велика електромеханічна стала часу у зв'язку з великим моментом інерції ротора. Це зменшує швидкість виконавчого двигуна.
Іншим рішенням задачі є виконання ротора 1 у вигляді тонкостінного порожнистого циліндра (стакана) (рис. 11.3), виготовленого з немагнітного матеріалу, звичайно – алюмінію або бронзи.
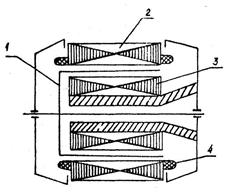
Рис. 11.3. Конструктивна схема виконавчого асинхронного двигуна з порожнистим ротором
Звичайно товщина стінок стакана Δ=0.3 – 0.8мм, а дна  мм. Повітряні зазори між циліндром та двома статорами 2;3 становлять
мм. Повітряні зазори між циліндром та двома статорами 2;3 становлять  мм, тому загальний немагнітний зазор у двигуні
мм, тому загальний немагнітний зазор у двигуні
 мм.
мм.
Порожнистий ротор має малий момент інерції, що забезпечує велику швидкодію двигуна.
При протіканні струму по двофазній обмотці статора створюється обертове магнітне поле, і в роторі наводяться вихрові струми, які взаємодіють з обертовим полем і створюють обертаючий момент.
У двигунах з потужністю меншою, ніж 1.5 Вт, обмотки керування і збудження досить часто розміщують у пазах внутрішнього статора 3. Тоді зовнішній статор без пазів і слугує лише для зменшення магнітного опору. Цим полегшується процес вкладання обмоток в пази і дещо збільшується обертаючий момент, але зростає діаметр ротора, що призводить до зростання моменту інерції. Для усунення цього недоліку одну обмотку розташовують на внутрішньому, а іншу – на зовнішньому статорі.
У зв'язку з великим немагнітним зазором ці двигуни мають значний намагнічуючий струм (0.8-0.9від  ) та cos φ = 0.4-0.5. cos φ дещо підвищується при наявності конденсатора в обмотці збудження, але великий намагнічуючий струм зменшує ККД до 10-40%. Це призводить до збільшення габаритів та маси двигунів з порожнистим немагнітним ротором у 2-4 рази в порівнянні з асинхронним двигуном звичайного виконання. Для зменшення габаритів і маси їх проектують на робочі частоти 330-1000 Гц. Порожнистий немагнітний ротор виконавчого асинхронного двигуна має малий індуктивний опір
) та cos φ = 0.4-0.5. cos φ дещо підвищується при наявності конденсатора в обмотці збудження, але великий намагнічуючий струм зменшує ККД до 10-40%. Це призводить до збільшення габаритів та маси двигунів з порожнистим немагнітним ротором у 2-4 рази в порівнянні з асинхронним двигуном звичайного виконання. Для зменшення габаритів і маси їх проектують на робочі частоти 330-1000 Гц. Порожнистий немагнітний ротор виконавчого асинхронного двигуна має малий індуктивний опір  . Це значно підвищує лінійність механічних та регулювальних характеристик двигуна.
. Це значно підвищує лінійність механічних та регулювальних характеристик двигуна.
Перевагою цих двигунів є плавність та безшумність ходу у зв'язку з відсутністю пазів на роторі.
Конструкція двигуна з порожнистим ротором може бути ще більше спрощена, якщо виконати ротор з феромагнітного матеріалу. Такий двигун не має внутрішнього статора. Тому повітряний зазор буде таким, як у двигунів зі звичайним ротором. При високих частотах живлячої напруги проникнення електромагнітного поля в глибину ротора мале, внаслідок чого опір ротора  буде значним і характеристики двигуна наближаються до лінійних. Щоб матеріал ротора не насичувався й активний опір його не був дуже великий, порожнистий стакан виконують зі стінками більшої товщини. Це призводить до збільшення моменту інерції і зменшення пускового моменту у порівнянні з порожнистим немагнітним ротором, тобто значно зменшується швидкодія (у 10-20 разів).
буде значним і характеристики двигуна наближаються до лінійних. Щоб матеріал ротора не насичувався й активний опір його не був дуже великий, порожнистий стакан виконують зі стінками більшої товщини. Це призводить до збільшення моменту інерції і зменшення пускового моменту у порівнянні з порожнистим немагнітним ротором, тобто значно зменшується швидкодія (у 10-20 разів).
Заходом до деякого збільшення пускового моменту є обміднення сталевого ротора шаром у 0,05-0,1мм. В цьому разі до контурів по сталі ротора додаються контури по мідному покриттю. Активний опір ротора зменшується, а потужність і момент зростають. При покритті шаром міді бічної поверхні ротора погіршується лінійність характеристик і виникають великі поверхневі втрати, викликані зубцевими пульсаціями магнітного потоку, що призводить до різкого перегріву машини. Тому іноді обміднюють тільки торці ротора. При нерівномірному повітряному зазорі (осідання підшипників в процесі експлуатації) двигуна з порожнистим сталевим ротором виникає однобічне магнітне притягання, а іноді – залипання. У двигунів з порожнистим немагнітним ротором цього недоліку немає.
Асинхронні двигуни з порожнистим ротором виготовляються з потужностями у межах від часток вата до кількох сотень ват. Двигуни з порожнистим сталевим ротором менше розповсюджені, ніж з короткозамкненим немагнітним.
Для машин малих габаритів (менше від 6см) керовані двигуни з ротором у вигляді білячої клітки зі своїми робочими характеристиками кращі від двигунів з порожнистим немагнітним ротором. Тому ці двигуни широко розповсюджені в малопотужному електроприводі.
Двофазні керовані двигуни з ротором у вигляді білячої клітки виконують у таких модифікаціях: звичайне виконання, з електромагнітним або інерційним демпфером, з демпфуючим тахогенератором. Всі ці машини виконуються з убудованими механічними редукторами.
На статорі двофазного двигуна розташовується обмотка. У практиці застосовують два типи обмоток: розділену та місткову. У першому випадку ланцюги збудження та керування електрично не пов'язані й на статорі розташовані дві незалежні одна від одної обмотки, які мають у загальному випадку різні числа витків та різні струми, які через них проходять. Кожна з обмоток займає половину всіх пазів статора. В машинах самої малої потужності одна з обмоток розташована в 1/3 пазів. Обмотка може бути двошаровою ( Вт) або двошаровою зі скороченим кроком (
Вт) або двошаровою зі скороченим кроком ( Вт). В останньому випадку зменшується вміст вищих гармонічних у кривій магнітного поля.
Вт). В останньому випадку зменшується вміст вищих гармонічних у кривій магнітного поля.
Великою перевагою розділеної обмотки є можливість здійснення будь-якого коефіцієнта трансформації.

Рис. 11.4. Місткова обмотка двофазного виконавчого двигуна
Рідше застосовується інший тип обмотки – місткова (рис. 11.4), у якої обидва ланцюги електрично пов'язані між собою. Таким чином, по тих самих провідниках проходять обидва струми одночасно: збудження й керування.
Не нашли, что искали? Воспользуйтесь поиском: