ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Параметри й застосування синхронних ДКР
Синхронні ДКР виготовляються в однофазному (конденсаторному) та багатофазному виконаннях з різними номінальними напругами, на стандартну частоту 50 Гц або інші частоти (до 40 Гц). Вони мають потужність від 3 Вт до 20 кВт і більше, причому створюються моменти від 0,045 кгм до 190 кгм. Пускові моменти досягають ще більших величин. Синхронні ДКР застосовуються для привода дозаторів, клапанів, засувок, регулювальних вентилів. Двигун може бути змонтований безпосередньо на гвинті вентиля, що дозволяє забезпечити просте й стійке регулювання процесу й зусилля порядку 300 кг. ДКР застосовується в приводах точних механізмів: ноніуса копіювальних верстатів, для намотування реохордів, потенціометрів, дротових датчиків опорів, у годинникових механізмах, різальних машинах, в різних системах телеметричного керування (привод "механічних рук" при точних маніпуляціях з радіоактивними речовинами), в машинах для розливу й пакування молока (кроковий режим – 1200 кроків/оберт) і т. д. Точність відпрацювання кутового переміщення валу в кроковому режимі на холостому ході становить біля ±1'.
14.3. Різні виконання й класифікація електричних машин з ротором, який котиться (ЕМКР)
Асинхронні ДКР. В одній з конструкцій (асинхронний двигун С.П. Розанова) масивне феромагнітне тіло (ролики) обкочує поверхню розточки статора назустріч полю (рис. 14.4).

Рис. 14.4. Асинхронний ДКР
Ролик обертається навколо своєї осі зі швидкістю:
 , (14.10)
, (14.10)
де s – ковзання.
Ролики можуть бути шихтованими з короткозамкненою кліткою, а поверхні обкочування – зубчастими.
Швидкість обертання валу двигуна:
 , (14.11)
, (14.11)
де dp – діаметр ролика;
Dн – діаметр спрямівника.
Двигун конструктивно складний і має низькі енергетичні показники.
Існують і інші конструкції асинхронних двигунів з ротором, який котиться.
ДКР з дисковим ротором. У 1958 р. австрійський інженер R. Schön запропонував синхронну машину з дисковим ротором, який котиться (рис. 14.5.).
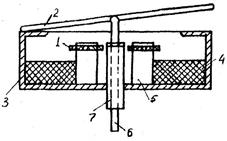
Рис. 14.5. Синхронна машина з ротором, який котиться
Ротор – диск 2 обертається на валу 6. Обертовий магнітний потік створюється трифазною обмоткою 1, розташованою на осерді 5. Уніполярний потік створюється котушкою 4. Швидкість обертання валу може регулюватись гвинтом 7. Вся конструкція розташована в корпусі 3.
В цій конструкції відсутні вібрації. Машина може використовуватись як тихохідний генератор для гідростанцій з малим напором (припливні).
ЕМКР інших конструкцій. Машини з циліндричним ротором можуть використовуватись як високочастотні генератори (50÷70 кГц) при синусоїдній формі напруги. Постійний магнітний потік може створюватись постійними магнітами, або без спеціальної обмотки постійного струму з використанням трифазних нульових схем випрямляння. На статорі іноді можуть розташовуватись дві обмотки змінного струму з різним числом пар полюсів, які живляться напругами різної величини й частоти. Такий двигун може використовуватись як сельсин – приймач в системі синхронного валу з електричною редукцією.
Можливе виконання ДКР комбінованого типу (синхронно-асинхронних, коли синхронний та асинхронний моменти діють узгоджено; синхронно-гістерезисних і т. д.).
ДКР постійного струму. ДКР можуть працювати від мережі постійного струму. Одна з конструкцій з якорем – диском без обмотки складається з трьох електромагнітів, які по черзі вмикаються спеціальним комутатором. Регулювання швидкості здійснюється регулювальним гвинтом, як у двигуна R. Schön. В двигуні відсутні вібрації. Він простий за конструкцією.
Існують конструкції ДКР постійного струму з циліндричними роторами.
Кроковий ДКР. Т.І. Зєвін запропонував конструкцію крокового двигуна з ексцентричним ротором (рис. 14.6.).

Рис. 14.6. Кроковий ДКР
Обмотки керування розташовуються на трьох осердях статора і вмикаються попарно. Ротор виконаний у вигляді феромагнітного порожнистого стакана, розташованого на колінчастому валу. Між статором і ротором зубчасте зачеплення. Такий кроковий двигун забезпечує фіксоване положення валу в безструмовому стані та має покращені динамічні властивості.
Двигуни – насоси. Принцип дії ДКР використовується в низці виконавчих механізмів. Так у 1954 р. в США був запропонований комбінований двигун-помпа, який працює як ДКР з більчиною кліткою на роторі. Ротор двигуна є одночасно й ротором помпи (рис. 14.7.)

Рис. 14.7. ДКР-помпа
До поверхні ротора за допомогою пружини притискається плунжер-перегородка 1, яка поділяє порожнину помпи на всмоктуючу та випускну. Суміщення приводного двигуна й помпи в одному механізмі дозволяє зменшити габарити й усунути проміжні ланки кінематичної передачі.
Двигуни-вібратори. ДКР можуть застосуватись як вібратори. Набір роторів з різними діаметрами дозволяє змінювати робочі параметри вібратора в широких межах. Електричні вібратори з ДКР забезпечують високочастотні коливання з порівняно малими витратами енергії.
ЕМКР можливо класифікувати по-різному.
За призначенням: двигуни, генератори, спеціальні машини (синхронного зв’язку, муфти, помпи, вібратори, імпульсно-фрикційні двигуни).
За родом струму: постійного (контактні, безконтактні), змінного (однофазні, багатофазні).
За принципом дії:
а) кондукційні (з вентильним підмагнічуванням), реактивні, магнітоелектричні, електромагнітні, з уніполярним підмагнічуванням, з двома обмотками на статорі;
б) індукційні (короткозамкнений ротор, масивний феромагнітний ротор, порожнистий феромагнітний або парамагнітний ротор);
в) комбіновані (синхронно-асинхронний, синхронно-гістерезисний).
За конструктивним виконанням (циліндричні, дискові, одностаторні, двостаторні, внутрішній або зовнішній ротор).
За виконанням поверхні котіння (гладкі, зубчасті, циліндричні, конічні).
За механічними характеристиками (синхронна – жорстка, асинхронна – м'яка).
За швидкісними характеристиками:
а) нерегульовані;
б) регульовані (передаточним відношенням, ковзанням, зміною струму якоря, зміною струму збудження, механічним гальмом).
За напрямом обертання (нереверсивні, реверсивні).
За характером руху ротора (безперервне, переривчасте – крокове).
За виконанням кінематичної передачі на вал (механічні муфти й передачі, електромагнітні й магнітні муфти).
Не нашли, что искали? Воспользуйтесь поиском: