ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Готовые кабели MOTION ‑ CONNECT Используются, если датчики положения двигателей без интерфейса DRIVE – CLiQ подключаются к сенсорным модулям. 1 страница
Выбор шин Profibus – DP
Выбираю диагностический повторитель для Profibus – DP 12 мбит/сек двухжильный с фланцем на стороне двигателя длиной 5м: 6ES7972 – 0BA41 – 0XA0.
2.3.11 Блоки питания
Выбираю модульный блок питания 1АС, 2АС, 120/230 VAC/24 VDC, 20 A, 120/230 с заказным номером 6EP1336 – 3ВА00.
Выбираю модульный блок питания 1АС, 2АС, 120/230 VAC/24 VDC, 5 A, 120/230-500 с заказным номером 6EP1336 – 3ВА00.
Выбираю модульный блок питания 1АС, 2АС, 120/230 VAC/24 VDC, 5 A, 120/230 с заказным номером 6EP1336 – 3ВА00.
Применяется модульный блок питания в различных областях промышленности во всех регионах мира. 3-фазное входное напряжение с диапазоном допустимых отклонений ~320... 550 В. Светодиодная индикация. Выбираемая реакция на короткое замыкание: ограничение тока или защитное отключение. Возможность подключения дополнительного буферного модуля (6EP1961 – 2BA00), сигнального модуля (6EP1961 – 2BA10) и модуля резервирования (6EP1961 – 2BA20).
Применение блоков питания SITOP modular =24 В/20 A позволяет получить целый ряд преимуществ:
– продление срока службы подключенных приемников электроэнергии: отсутствие колебаний напряжения и наличие электронных защит;
– минимальное выделение тепла: высокий КПД блока питания;
– простота установки.
2.3.12 Индикаторная панель оператора
Выберу панель оператора ВOP20 с заказным номером 6SL3055 – 0AA00 – 4ВA0. Расширенная панель оператора ВOP20 – это опционное устройство ввода/вывода для преобразователей серии SINAMICS. ВOP20 и преобразователь частоты SINAMICS осуществляют связь по последовательному интерфейсу RS 232 с протоколом PPI. Для соединения может использоваться нуль-модемный кабель.
ВOP20 может не использоваться, если привод работает, например, только через PROFIBUS, а локальная индикация в шкафу не нужна. В этом случае ВOP20 может использоваться просто в целях пуско-наладки и для получения диагностической информации, тогда она монтируется в интерфейс RS 232 на блоке управления CU320. На индикаторной панели отображаются статусы работы, установки и актуальные значения, параметры, индексы, ошибки и аварийный сигналы.
Для работы панели ВOP20 необходимо внешнее питание 24 В (макс. потребляемая мощность 200 мA).
2.3.13 Выбор автоматического выключателя
Автоматический выключатель С60N и C32H–DC представляет собой компактный токоограничивающий коммутационный аппарат, оптимизированный для фидерных сборок. Автоматические выключатели используются для коммутации и защиты трехфазных двигателей до 45 кВт при AC 400 В, а также для других потребителей с номинальными токами до 100 A.
Автоматические выключатели С60N и C32H – DC фирмы SCHNEIDER устойчивы к климатическим воздействиям. Они предназначены для использования в закрытых помещениях, где нет осложняющих эксплуатационных условий (например, пыль, едкие пары, вредные газы). Для использования в пыльных и влажных помещениях следует предусматривать специальные меры защиты. Автоматические выключатели С60N и C32H – DC допускают ввод питания сверху или снизу.
Допустимые температуры окружающей среды, максимальная коммутационная способность, токи расцепления и другие граничные условия для применения приведены в технических данных и характеристиках расцепления.
Выбираю двухполюсный автоматический выключатель для защиты систем С60N, 6 А, Cc повышенной отключающей способностью. Для защиты двигателя выберу двухполюсный автоматический выключатель C32H – DC, 6 А, Cc повышенной отключающей способностью.
2.3.14 Выбор предохранителей для защиты установки
Выбираю плавкую вставку LVHRC с заказным номером 3NE4 337 800VAC с Iном = 710 А и Uном = 500 В.
Держатели для плавких вставок выбираю LVHRC с заказным номером 3NE1102.
Выбираю разъединитель-предохранитель 3KL6230–1AB02, 690VAC,
800A, 3/2.
2.4 Описание работы схемы электрической принципиальной
При замыкании автоматического выключателя QF1 3–х фазное напряжение, с частотой 50 Гц подаётся на клеммы фильтр-пакета А1 L1, L2, L3 и на блок питания G1. Питание с фильтр-пакета поступает на сетевой дроссель L1 на клеммы U2.1, V2.1, W2.1. С группы фильтров питание поступает на модуль питания шасси U1. Вплоть до модуля U1 подходит 3–фазное напряжение 380 В. Регулирование в сетевом модуле осуществляется с помощью IGBT-транзисторов с изолированным затвором. Вместе с сетевыми дросселями и согласованной структурой системы сетевые фильтры ограничивают кондуктивные помехи, создаваемые силовыми модулями.
Модуль U1 преобразователя выпрямляет 3–х фазное напряжение сети в постоянное для дальнейшего питания этим напряжением модуля двигателя U2 и для питания тормозного модуля А1.
Одновременно с питанием группы фильтров и модуля А3 преобразователя, осуществляется подача напряжения и на блок питания SitopModular – G1. Блок питания выпрямляет и преобразует 3-х фазное напряжение сети в постоянное напряжение 24 В. Выпрямленным напряжением 24 В мы питаем такие модули и устройства как:
– блокуправления Control Unit CU320 (A8);
– модули питания двигателя U2 и питания шасси U1;
– панель оператора PanelOperatorBOP20 (В1).
Асинхронный двигатель K21F315L4 подключается к модулю преобразователя U1 и питается 3–х фазным напряжением 380 В через клеммы U1, V1, W1. Для питания двигателя используются силовые кабели
6FX5002 – 5CS41 – 0. Двигатель к модулю U2 подключен через автоматический выключатель QF5 марки С60N, 6 А, C. Модуль питания двигателя U2 преобразует высокое постоянное напряжение в переменное 3-х фазное, и является силовым устройством-преобразователем DC-AC. Управляющие сигналы, которыми непосредственно и управляются модули преобразователя, передаются по кабелям марки Drive – CliQ 6SL3060 – 4АA10 – 0AA0. Сигналы от блока управления CU320 поступают на модули А3 и А4 преобразователя. СU320 представляет собой центральный модуль управления, в котором осуществляются функции регулирования по замкнутому и разомкнутому циклу для сетевого модуля и моторного модуля. СU320 поддерживает связь через клеммы Х100, Х101, Х202, Х103.
В модуле двигателя расположены входы для датчика температуры и входные клеммы для безопасного останова BR+, BR–. Управляющие сигналы поступают на клеммы Х200, Х201, Х202 SingleMotorModule.
С помощью операторной панели осуществляются пуско-наладочные работы, получение диагностической информации, ввод-вывод данных по управлению за техпроцессом.
Предохранители – разъединители FU защищает схему от коротких замыканий.
2.5 Анализ базовой системы управления электроприводом листоправильной машины с позиции реализации энергосберегающих алгоритмов управления
Система приводов Sinamics S120, которая применяется для управления летучими ножницами, предназначенная для решения широкого спектра задач в станко-и машиностроении. Большое количество различных аппаратных модулей и технологических функций позволяет находить оптимальное решение для любого промышленного применения. Преобразователи Sinamics S120 выпускаются в модификациях для индивидуального или багаторухового поводу. Пользователь может выбирать путем параметрирования любой закон регулирования - скалярный, векторный или серво, аппаратная часть при этом не изменяется. Диапазон номинальных мощностей преобразователей частоты Sinamics S120 составляет от 0,12 до 4500 кВт.
Sinamics предлагает решение следующих задач электропривода:
– для простых применений – насосов и вентиляторов;
– для требовательных индивидуальных приводов в центрифугах, прессах, экструдерах, транспортерах и подъемно-транспортных устройствах;
– в связанных приводах для текстильных машин, при производстве пленок и бумаги, а также в прокатных станах;
– для высокодинамичный сервоприводов станков, упаковочных и печатных машин.
В зависимости от сферы применения в рамках семейства Sinamics для каждой задачи существует оптимальная модель привода. Sinamics G предназначен для стандартных применений с асинхронными двигателями. Эти применения отличаются меньшими требованиями к динамике и точности регулирования скорости двигателя. Sinamics S позволяет выполнять управление синхронными и асинхронными двигателями и удовлетворяет самым высоким требованиям к следующему:
– динамики и точности регулирования;
– интеграции различных технологических функций в систему;
– управление поводу.
Приводы Sinamics S обеспечивают следующие законы управления:
– U / f–управление;
– векторное управление с наличием датчиков или без датчиков;
– сервоуправление.
Sinamics соответствует концепции общей платформы Totally Integrated Automation. Общие компоненты аппаратуры и программного обеспечения, а также унифицированные инструменты для компоновки, проектирования и ввода в эксплуатацию гарантируют высокую совместимость между всеми компонентами.
Из большого количества комбинированных друг с другом компонентов и функций пользователь может собрать соответствующую конкретной задаче оптимальную комбинацию. Эффективный инструмент проектирования SIZER облегчает определение и выбор оптимальной конфигурации привода. Sinamics S120 дополняется большим набором двигателей. Как синхронные, так и асинхронные двигатели поддерживаются Sinamics S120.
При употреблении Sinamics S120 в составе индивидуальных приводов система управления верхнего уровня управляет приводами таким образом, что возникает желаемый движение. Для этого нужен циклический обмен данными между системой управления и всеми приводами. В предыдущих моделях этот обмен осуществлялся по полевой шине с соответствующими затратами на монтаж и проектирование машин.
В этом отношении Sinamics S120 предлагает новое решение: центральный блок управления выполняет все функции регулирования для всех подключенных осей и дополнительно реализует технологические связи между приводами и между осями. Поскольку все необходимые сведения уже существуют в центральном блоке регулирования, они не должны дополнительно переноситься между приводами.
Блок регулировки Sinamics S120 решает только простые технологические задачи. Для требовательных технологических задач он дополняется свободно программируемыми модулями Simotion D.
Все компоненты Sinamics S120, связаны друг с другом посредством общего последовательного интерфейса DRIVE–CLiQ. Унифицированная техника соединений и стандартные разъемы снижают разнообразие техники и складские расходы. Для двигателей без интегрированного интерфейса DRIVE–CLiQ есть блоки преобразователей (модули датчиков) для преобразования сигналов обычных датчиков в DRIVE–CLiQ.
Таким образом, привод Sinamics S120 обладает широкими функциональными возможностями и характеризуется высоким уровнем автоматизации с возможностью интеграции в общую информационную сеть предприятия. Инвертор 6SL3720–1TE37–5AA0–Z имеет возможность реализовывать все прогрессивные современные способы управления асинхронным двигателем, включая векторное управление. Поставленная цель дипломного проекта – повышение энергетической эффективности листоправильной машины холодной правки стана 2300 – может быть реализована на базе существующей аппаратной базы системы управления электроприводом без необходимости ее совершенствования. Модернизация в таком случае будет касаться алгоритмической части, то есть система векторного управления должна работать так, чтобы учитывая изменчивость статического момента и момента инерции, рационально регулировать затраты энергии за счет изменения потокосцепления ротора. Для подтверждения верности этого утверждения проведем исследования энергозатрат при переменном статическом моменте и моменте инерции в базовой электромеханической системе.
2.9 Анализ работы электропривода листоправильной машины с базовой системой векторного управления на основе модели в подвижной системе координат (d – q)
2.9.1 Описание электропривода с векторной системой управления в системе координат (d – q)
Применение принципа векторного управления позволяет создавать высокодинамичные электромеханические системы широкого применения с практически любым нужным диапазоном регулирования скорости. Векторное управление, как правило, обеспечивает закон частотного управления. Нужны статические и динамические свойства электропривода достигаются путем использования распределительного регулирования механическими (момент, скорость) и магнитными (магнитный поток или потокосцепления) координатами. При векторном управлении учитывается взаимное положение обобщенных векторов электромагнитных величин.
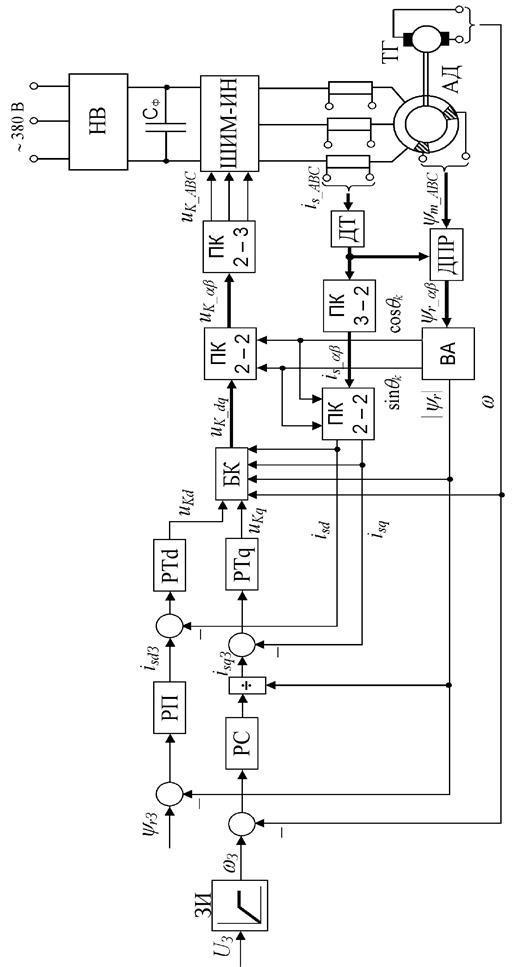
В силовой схеме электроприводов с векторным управлением обычно используется преобразователь частоты на основе выпрямителя и инвертора напряжения (для небольших мощностей возможно также применение непосредственных преобразователей частоты), формирование выходного напряжения которого происходит с использованием принципа широтно-импульсной модуляции (ШИМ). Функциональная схема системы векторного управления короткозамкнутым асинхронным двигателем (АД) для случая, когда все регулируемые координаты могут быть измерены, приведена на рисунке 49. Система имеет два канала управления: модулем вектора потокосцепления ротора и угловой скоростью ротора, каждый из каналов имеет по два контура регулирования.

Задача сигналов осуществляется в системе координат (d – q), ориентированной по вектору потокосцепления ротора  , т.е.
, т.е.  .
.
На рисунке 2.28 введено следующие обозначения: НВ, ШИМ–ИН – неуправляемый выпрямитель и инвертор напряжения с ШИМ–коммутацией преобразователя частоты; АД – асинхронный двигатель; ДТ, ДПР, ТГ – датчики тока, потокосцепления ротора и скорости соответственно; ПК – преобразователи координат; ВА – векторный анализатор; БК – блок компенсации; РС, РП, РТd, РТq – регуляторы скорости, потокосцепления ротора, d– и q–составляющих тока статора соответственно; СО – задатчик интенсивности.
Преобразование сигналов к естественной трехфазной системы координат статора выполняется последовательно – путем использования преобразователей координат (ПК) 2–2 (сначала к неподвижной ортогональной системе координат a, b) и 2–3 (затем к неподвижной системы A, B, C).
Получение составляющих тока статора, который был измерен с помощью датчиков тока (ДТ), в системе координат (d – q) здийсняеться путем обратных преобразований. Регуляторы внутренних контуров регулирования составляющих тока статора обычно выполняются пропорционально-интегральными.
Путем применения датчиков Холла или измерительных обмоток выполняется измерение составляющих главного потокосцепления  в системе координат A, B, C. Составляющие потокосцепления ротора исчисляются в датчике потокосцепления ротора (ДПР) по таким зависимостям (без учета коэффициента передачи датчиков Холла)
в системе координат A, B, C. Составляющие потокосцепления ротора исчисляются в датчике потокосцепления ротора (ДПР) по таким зависимостям (без учета коэффициента передачи датчиков Холла)
 (2.69)
(2.69)
где,  – составляющие главного потокосцепления в системе координат (α – β) – предварительно вычисляются по аналогии с (2.57).
– составляющие главного потокосцепления в системе координат (α – β) – предварительно вычисляются по аналогии с (2.57).
Выделение сигналов амплитуды и фазы вектора осуществляется в векторном анализаторе (ВА). Сигнал, пропорциональный к модулю вектора потокосцепления ротора, заводится на блок сравнения регулятора потокосцепления (РП) (который обычно выполняется ПИ-типа), а гармонические сигналы  и
и  принимают участие в преобразованиях координат 2–2 путем их заведении в соответствующие координатных преобразователей (ПК 2 – 2).
принимают участие в преобразованиях координат 2–2 путем их заведении в соответствующие координатных преобразователей (ПК 2 – 2).
Измерение скорости вращения ротора АД выполняется с помощью датчика скорости или тахогенератора (ТГ), установленного на валу двигателя. Регулятор скорости (РС) обычно выполняется пропорциональным (П-типа) или пропорционально-интегральным (ПИ–типа), в зависимости от необходимости предоставления системе астатическим свойств. Блок деления на входе контура регулирования q-составляющей тока статора, является неотъемлемой и обязательной частью регулятора скорости, поскольку потокосцепления ротора входит в знаменателе дроби, определяющей коэффициент усиления регулятора скорости.
Сигналы с выходов регуляторов скорости (isqЗ) и потокосцепления (isdЗ) могут быть ограничены на соответствующих уровнях: ограничение isdЗ нужно для недопущения увеличения тока намагничивания больше его номинальное значение, ограничения же isqЗ – от появления недопустимо больших колебаний и устоявшихся значений электромагнитного момента двигателя.
Сигнал задания на скорость вращения ротора двигателя получаемая с помощью задатчик интенсивности (ЗИ), задачи на потокосцепления может быть организовано независимо (задачи конкретной желаемой величины потокосцепления ротора в однозонный системах) или в функции задания на скорость.
Динамические свойства рассматриваемой системы векторного управления становятся приемлемыми только при наличии блока компенсации (БК), который выполняет отделения каналов регулирования путем нейтрализации влияний внутренних обратных связей (ВЗЗ) АД. Эта компенсация выполняется (аналогично компенсации влияния противо – ЭДС двигателя в системах ЭП постоянного тока) путем заведения аналогичных сигналов с противоположным знаком на вход инвертора напряжения. Как правило, на практике компенсируются не все ВЗЗ, а лишь наиболее влиятельные, к числу которых относятся перекрестные ВЗЗ и противо-ЭДС двигателя. Вообще, свойства системы векторного управления АД будут тем более качественными, чем большее количество существующих ВЗЗ зкомпенсовано.
Следует отметить, что, в отличие от рассмотренного средства (условно ему предоставим название непосредственной компенсации), компенсация ВЗЗ может быть выполнена в соответствии с так называемого принципа упреждающего управления, сущность которого заключается в том, что в блок компенсации (БК) заводятся не сигнал с датчиков нужных величин, а соответствующие сигналы задания из системы управления.
Своеобразным недостатком векторного управления с ориентацией по вектору потокосцепления (в нашем случае – ротора) является необходимость как можно более точного измерения или оценки амплитудной величины и углового положения этого вектора. Ограничения и недостатки, связанные с измерением потокосцепления (как с помощью датчиков Холла, так и измерительных обмоток) [8, 9], приводят к тому, что чаще всего для определения потока используют математические модели или наблюдатели состояния.
Все рассмотренное является абсолютно правомерным при организации при необходимости в системе векторного управления короткозамкнутым АД законов частотного управления  или,
или,  и (с учетом особенностей регулирования и измерения) в случае аналогичного управления АД с фазным ротором со стороны ротора. Система управления будет иметь подобную структуру, но несколько усложненную по причине большего количества ВЗЗ двигателя, которые нужно компенсировать [10, 11].
и (с учетом особенностей регулирования и измерения) в случае аналогичного управления АД с фазным ротором со стороны ротора. Система управления будет иметь подобную структуру, но несколько усложненную по причине большего количества ВЗЗ двигателя, которые нужно компенсировать [10, 11].
Общими недостатками систем векторного управления является сложность управляющих и функциональных устройств при преобразовании координат и фаз, а также выполнения компенсационных связей при широком диапазоне регулирования скорости и нагрузке электропривода.
2.9.2 Упрощенная функциональная схема электропривода с векторной системой управления в системе координат (d – q)
Для построения модели электропривода с векторной системой управления используем полученную ранее модель асинхронного двигателя в системе координат (d – q).
Упрощенная функциональная схема системы, предназначенная для определения структуры и параметров регуляторов и для расчета переходных процессов, приведена на рисунке 2.37. Схема построена с использованием математического описания ненасыщенного асинхронного двигателя для электропривода с датчиками тока и скорости.
На рисунке 2.37 введены следующие обозначения: ЗИС– задатчик интенсивности изменение скорости; ЗИП – задатчик интенсивности изменение потокосцепления; РС– регулятор скорости, который принимает на вход рассогласование между заданным значением скорости и сигналом по скорости с выхода системы, на выходе – формирует задания по моменту  ; РП – регулятор потокосцепления, на вход которого поступает рассогласование между заданным
; РП – регулятор потокосцепления, на вход которого поступает рассогласование между заданным  и
и  имеющимся (рассчитанным) потокосцепления, на выходе регулятор формирует задания по току статора
имеющимся (рассчитанным) потокосцепления, на выходе регулятор формирует задания по току статора  в проекции на ось d; РМ – регулятор момента, что получает на входе рассогласование между и имеющимся (рассчитанным) значению момента, на выходе он образует задачи по току статора
в проекции на ось d; РМ – регулятор момента, что получает на входе рассогласование между и имеющимся (рассчитанным) значению момента, на выходе он образует задачи по току статора  в проекции на ось q; РСd – регулятор тока по оси d, на выходе формирует задачи по напряжению
в проекции на ось q; РСd – регулятор тока по оси d, на выходе формирует задачи по напряжению  для преобразователя частоты; РТq – регулятор тока по оси q, на выходе формирует задачи по напряжению
для преобразователя частоты; РТq – регулятор тока по оси q, на выходе формирует задачи по напряжению  для преобразователя частоты; ДТА – датчик тока фазы А; ДТВ – датчик тока фазы В; ДТС – датчик тока фазы С; АД – асинхронный двигатель с короткозамкнутым ротором; ТГ – тахогенератор (датчик скорости).
для преобразователя частоты; ДТА – датчик тока фазы А; ДТВ – датчик тока фазы В; ДТС – датчик тока фазы С; АД – асинхронный двигатель с короткозамкнутым ротором; ТГ – тахогенератор (датчик скорости).

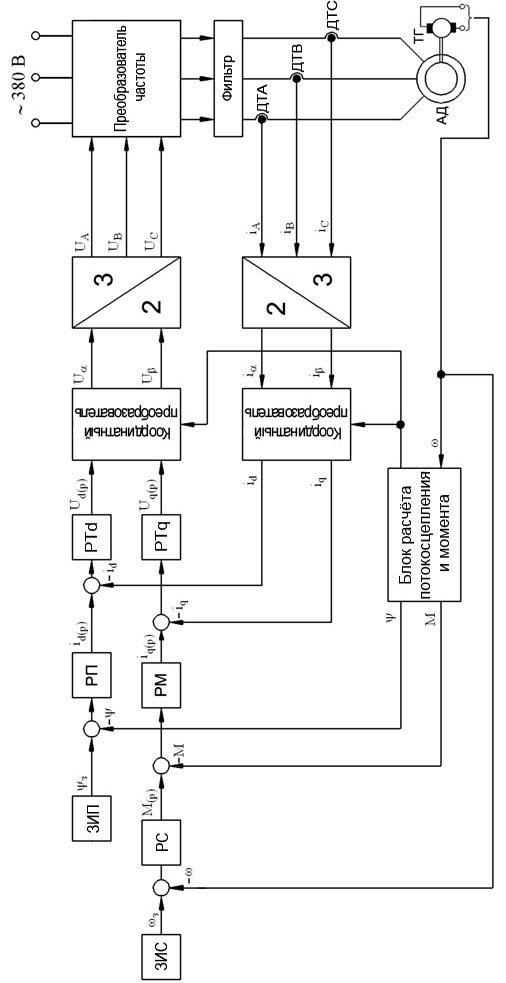
Преобразователь частоты характеризуется коэффициентом передачи по напряжению и чистым запаздыванием на некоторое время  , которое определяется периодом ШИМ инвертора. Для упрощения расчетов считается, что токи,
, которое определяется периодом ШИМ инвертора. Для упрощения расчетов считается, что токи,  ,
,  ,
,  cледовательно, и
cледовательно, и  и
и  измеряются безинерционными датчиками тока с некоторым коэффициентом передачи.
измеряются безинерционными датчиками тока с некоторым коэффициентом передачи.  .Считается также, что величины М и потокосцепления ротора
.Считается также, что величины М и потокосцепления ротора  , которые определяются по модели, точно воспроизводят реальный электромагнитный момент двигателя и потокосцепления ротора в масштабах, заданных коэффициентами обратных связей и соответственно. Датчик скорости имеет коэффициент передачи. При моделировании будем рассматривать контуры регулирования тока по каналам потокосцепления и скорости, а также контур регулирования потокосцепления, контур регулирования момента и контур регулирования скорости.
, которые определяются по модели, точно воспроизводят реальный электромагнитный момент двигателя и потокосцепления ротора в масштабах, заданных коэффициентами обратных связей и соответственно. Датчик скорости имеет коэффициент передачи. При моделировании будем рассматривать контуры регулирования тока по каналам потокосцепления и скорости, а также контур регулирования потокосцепления, контур регулирования момента и контур регулирования скорости.
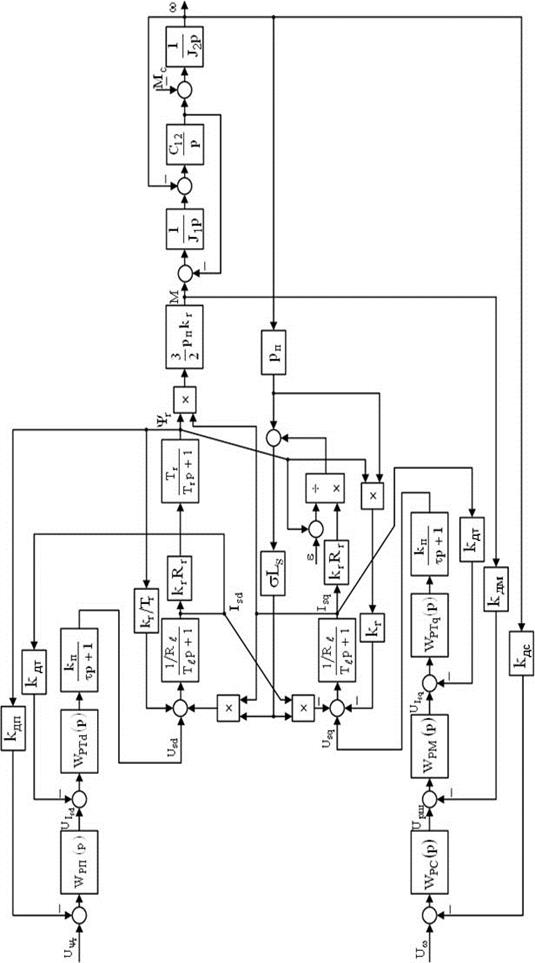
2.9.3 Структурная схема электропривода с векторной системой управления в системе координат (d – q) и настройки ее контуров регулирования
Для построения структурной схемы электропривода с векторной системой управления в системе координат (d – q) воспользуемся приведенной в предыдущем пункте функциональной схеме (рисунок 2.28), структурной схемой асинхронного двигателя в системе координат (d – q), показанной на рисунке 2.17, и структурной схемой двохмасовои математической модели (рисунок 2.24). Такая структурная схема будет учитывать жесткость вала, передающего вращение от двигателя к редуктору. Кроме того, на этой структурной схеме считается  , поскольку двигатель имеет короткозамкнутый ротор (рисунок 2.29).
, поскольку двигатель имеет короткозамкнутый ротор (рисунок 2.29).
Рассмотрим настройки контуров регулирования и расчет динамических характеристик в системе векторного управления скоростью асинхронного двигателя.
Структурная схема контура тока без учета перекрестных связей показана на рисунке 2.30. Настройка выполним без учета влияния перекрестных связей.
Рисунок 2.30 Структурная схема контура тока по оси d
При заданной частоте ШИМ, значение чистого опоздания преобразователя частоты составляет значение , обратно пропорциональное частоте широтно-импульсной модуляции. В зоне частот, где  фазочастотных характеристика звена чистого запаздывания близка к фазочастотных характеристики апериодического звена с постоянной времени
фазочастотных характеристика звена чистого запаздывания близка к фазочастотных характеристики апериодического звена с постоянной времени  .
.
Передаточная функция разомкнутого контура тока статора по оси d записывается в виде
 , (2.70)
, (2.70)
где  – коэффициент передачи частотного преобразователя;
– коэффициент передачи частотного преобразователя;
– постоянная времени частотного преобразователя;
 – коэффициент передачи датчика тока;
– коэффициент передачи датчика тока;
 – передаточная функция регулятора тока по осью d;
– передаточная функция регулятора тока по осью d;
 ,
,  – расчитаны в пунктах 2.2 и 2.3 параметры двигателя.
– расчитаны в пунктах 2.2 и 2.3 параметры двигателя.
Во время расчётов параметров регулятора тока можно наименьшую некомпенсированую постоянную времени  принять равной . Исходяиз настроки контура на модульный оптимум, регулятор
принять равной . Исходяиз настроки контура на модульный оптимум, регулятор  будет компенсировать часть объекта
будет компенсировать часть объекта

 . (2.71)
. (2.71)
Тогда передаточная функция регулятора может быть определена следующим образом
 . (2.72)
. (2.72)
Получим пропорционально-интегральный регулятор тока (ПИ-регулятор). Из расчетов, проведенных в пункте 2.3 следует, что  (
( с, а
с, а  с), поэтому в контуре регулирования тока по оси q можно применить такой же ПИ-регулятор (2.31).
с), поэтому в контуре регулирования тока по оси q можно применить такой же ПИ-регулятор (2.31).
Рассмотрим контур регулирования потокосцепления ротора. Для него контур регулирования тока по оси d будет внутренним. Передаточная функция замкнутого контура тока, настроенного на модульный оптимум, может быть представлена в виде колебательной звена с такой передаточной функцией
 . (2.73)
. (2.73)
Структурная схема контура регулирования потокосцепления ротора приведена на рисунке 2.32
Рисунок 2.32 – Структурная схема контура потокосцепления
Для расчета параметров регулятора в контуре, содержащем подчиненный замкнутый контур (в данном случае – контур тока статора по оси d), рекомендуется рассматривать его как апериодическую звено с эквивалентной малой постоянной времени, равной удвоенной малой постоянной времени подчиненного контура. Если внутренний контур имел малую некомпенсированную постоянную времени  , то внешний кметь
, то внешний кметь  .
.
Не нашли, что искали? Воспользуйтесь поиском: