ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Готовые кабели MOTION ‑ CONNECT Используются, если датчики положения двигателей без интерфейса DRIVE – CLiQ подключаются к сенсорным модулям. 3 страница
 , (3.1)
, (3.1)
где  – статический момент нагрузки, приведенный к валу листоправильной машины в системе СГС;
– статический момент нагрузки, приведенный к валу листоправильной машины в системе СГС;
 – статический момент нагрузки, приведенный к валу двигателя в системе СИ.
– статический момент нагрузки, приведенный к валу двигателя в системе СИ.
Вращение вала на  , показано на рисунке 1.12, отвечает одному циклу правки, который составляет 2 с. Статический момент загрузки приведенный, к валу двигателя, показан на рисунке 3.3.
, показано на рисунке 1.12, отвечает одному циклу правки, который составляет 2 с. Статический момент загрузки приведенный, к валу двигателя, показан на рисунке 3.3.
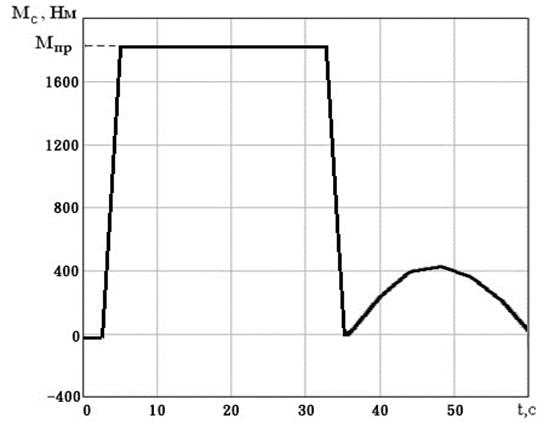
Рисунок 3.3 – Зависимость статического момента на валу двигателя в течении
одного цикла правки полосы
Изменение статического момента, показаное на рисунке 3.3, приводится к тахограмме работы привода, приведенной на рисунке 3.1, тоесть правка происходит втечении времени от 2,4 с до 35,4 с после начала цикла работы. В это время момент является максимальным и составляет значение  Нм, рассчитанное више. При этом вращение на отвечает 2 с, а значение промежуточных точек зависимости полученые сопоставлением ординат тахограммы (рисунок 3.1) и экспериментальной диаграммы изменения статического момента (рисунок 1.12).
Нм, рассчитанное више. При этом вращение на отвечает 2 с, а значение промежуточных точек зависимости полученые сопоставлением ординат тахограммы (рисунок 3.1) и экспериментальной диаграммы изменения статического момента (рисунок 1.12).
Действуя аналогичным образом, превращаем диаграмму махового момента машины (рисунок 1.11) до зависимости, что илюстрирует изменение во времени момента инерции механизма, приведенного к валу двигателя. Приведение махового момента машины к моменту инерции выполняется по формуле
 , (3.2)
, (3.2)
где  – маховый момент механизма машины, приведенный к валу машины без учета муфты (по диаграмме на рисунке 1.11);
– маховый момент механизма машины, приведенный к валу машины без учета муфты (по диаграмме на рисунке 1.11);
 – момент инерции механизма, приведенный к валу двигателя.
– момент инерции механизма, приведенный к валу двигателя.
Для получения плавной кривой и повышения точности описания экспериментальных точек применяем кубическую сплайновую интерполяцию, которую выполняем в программной среде Mathcad. На рисунке 3.4 приведена кривая, полученная в результате интерполяции. Экспериментальные точки, используем для построения кривой сведены в таблицу 3.1
Таблица 3.1 – Экспериментальные точки для определения переменного момента инерции, приведенного к валу двигателя
 , c , c
| 2,5 | 7,5 | 12,5 | 17,5 | |||||
 , , 
| 4,477 | 4,514 | 4,452 | 4,306 | 4,094 | 3,831 | 3,534 | 3,217 | 2,919 |
| , c
| 22,5 | 27,5 | 32,5 | 37,5 | 42,5 | ||||
| ,
| 2,735 | 2,772 | 3,107 | 3,542 | 3,723 | 3,313 | 3,209 | 3,375 | 3,968 |
Продолжение таблицы 3.1
| , c
| 47,5 | 52,5 | 53,6 | 54,62 | 55,65 | 56,7 | 57,75 | ||
| ,
| 4,421 | 4,558 | 4,596 | 4,45 | 4,169 | 3,984 | 3,731 | 3,376 | 3,01 |
| , c
| 58,3 | 58,85 | 59,0 | 59,5 | |||||
| ,
| 2,827 | 3,011 | 3,419 | 3,939 | 4,477 |

Рисунок 3.4 – Зависимость приведенного к валу двигателя момента инерции механизма в течении одного цикла правки листов листоправильной машиной
3.1.2 Моделирование электромеханической системы листоправильной машины с векторным управлением при работе по тахограмме непрерывной правке полосы на листы размерной длины
Реализацию зависимостей статического момента нагрузки и момента инерции от времени на протяжении одного цикла правки, показаных на рисунках 3.3 и 3.4 выполняем по экспериментальным точкам в MATLAB Simulink при помощи блоков Signal Builder (рисунки 3.5, 3.6).

Рисунок 3.5 – Зависимость статического момента на валу двигателя в течении
одного цикла правки полосы листоправильной машиной, задана у блоці Signal Builder

Рисунок 3.6 – Зависимость приведенного к валу двигателя момента инерции механизму впродовж одного циклу різання, задана у блоці Signal Builder
3.2 Повышение энергетической эффективности стана 2300 холодной правки путем оптимизации энергопотребления электромеханической системой листоправильной машины
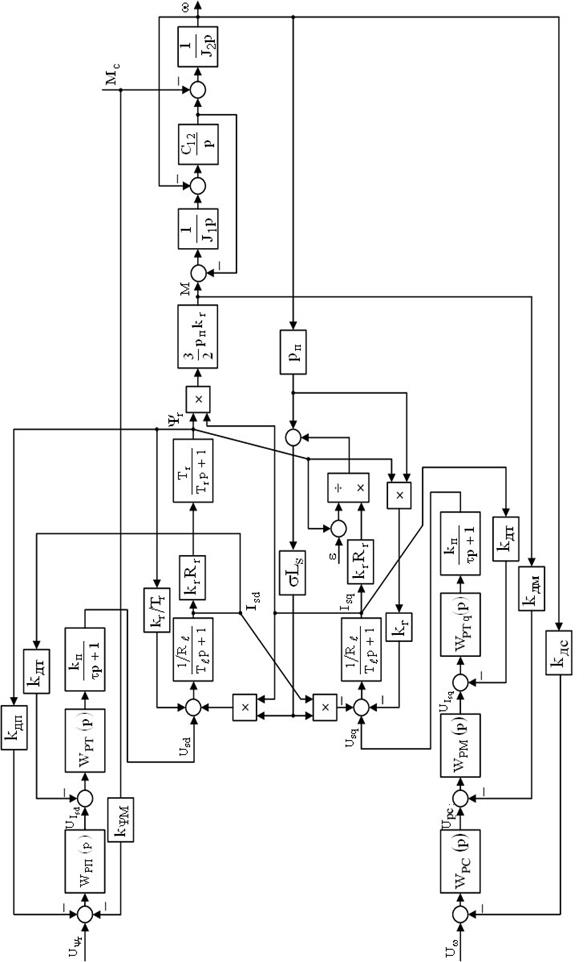
3.2.1 Сущность совершенствования системы векторного управления электропривода листоправильной машины и структурная схема с предложенным усовершенствованием
Главная идея совершенствования системы управления электроприводом листоправильной машины является замена частотного преобразователя (инвертора) SINAMICS S120 ServoControl на более усовершенствованный и экономически выгодный инверторOmron CIMR – G7C4300с учетом сменности статического момента нагрузки и момента инерции и использование момента нагрузки для управления потокосцепления ротора. То есть в предложенной системе автоматического управления потокосцепления ротора не остается постоянным на уровне 6,009 Вб, а меняется, повторяя характер изменения нагрузки (при увеличении нагрузки потокосцепление увеличивается). Когда нагрузка постоянная, то также не меняется.
Сущность изменений, вносимых в структурной схемы системы автоматического управления, заключается в создании дополнительного канала передачи информации с моментом нагрузки. При этом принимается во внимание, что потокосцепления не может быть уменьшено ниже некоторой величины, так как система пойдет в разнос, состоится переброска двигателя вследствие падения критического момента через малую величину напряжения статора. Предложенная система управления электроприводом листоправильной машины будет реализовывать одновременно как принцип управления по отклонению (Ползунова – Ватта), так и принцип управления по возмущению (принцип Понселе), т.е. будет комбинированной [13-16].
Структурная схема электромеханической системы с векторным управлением асинхронным двигателем с короткозамкнутым ротором, включающий предлагаемое совершенствование, приведена на рисунке 3.33.

4 ЭКОНОМИЧЕСКАЯ ЧАСТЬ
4.1 Технико-экономическое обоснование модернизации электромеханической системи листоправильной машины
Развитие теории машин переменного тока, создание усовершенствованных силовых полупроводниковых приборов и преобразователей на их основе, использования современных способов управления, включая микропроцессорные, позволили создать высококачественные и надёжные системы регулированых асинхронных электроприводов, которыеявляются основным видом регулированого электропривода.
В 2002 году в Европпе из общего числа регулированых приводов электроприводы переменного тока составили 68%, электроприводы постоянного тока – 15%, механические и гидравлические приводы – 17%. Тенденция роста доли регулированых асинхронных электроприводов сохранится и в дальнейшем, поскольку массовый регулированый электропривод может быть реализован только на базе асинхронных двигателей. Это связано с тем, что в диапазоне мощностей до 100 кВт их изготавливаетсяв50 раз больше, чем двигателей постоянного тока.
Широкое использование регулированых электроприводов привело к тому, что современный электропривод является не только энергосиловой установкой, которая позволяет обеспечить призводственные механизмы необходимой механической энергией, но и способом управления технологическими процессами, поскольку задание по реализации качества производственных процессов в данное время в большенстве случаев ложатся на системи управления регулироваными электроприводами в объединении с системами технологической автоматики. в связи с ростом цен на энергоносители, в частности на электроэнергию, проблема энергосбережения прилбретает особенной актуальности.
Энергосбережение стало одним из приоритетных направлений технической политики во всех развитых странах мира. Это связано, во-первых, с ограниченностью и необновлению основных энергоресурсов, во-вторых, сбезпрерывным ростомтрудностей их добычи и стоимости, в-третьих, с глобальными экологическими проблемами, которые отразились на рубеже тысячилетий.
Энергосбережение является наиболее дешевым и безопасным способом увеличения энергогенерирующих мощностей, посколькузатраты на экономию 1 кВт мощности обходятся в 5 раз дешевле, чем стоимостьна введение 1 кВт мощности.
Основные потери (до 90%) приходятся на сферу энергопотребления, в которой могут быть сконцентрированы основные усилия по энергосбережению.
Поскольку электроприводы потребляют до 70% электроэнергии, то наиболее существенная экономия электроэнергии может быть достигнута при использовании регулированых электроприводов для управления технологическими процессами, что в объединении с возможностями автоматизации может обеспечить оптимальное использование электроэнергии и других ресурсов.
В связи с тем, что среди регулированных электроприводов доминирующее положение занимают частотно-регулированые асинхронные электроприводы, их массовое использование позволяет решать не только технологические задания, но и проблему энергосбережения.
Использование частотно-регулированого электропривода с короткозамкнутым асинхронным двигателем позволяет существенно повысить надежность работылистоправильной машины и снизить потребляемую ей электроэнергию.
Особенно важным для снижения энергопотребления является рациональное использование электроэнергии в электроприводе листоправильной машины, что приводит к повышению её энергетической эффективности.
Возможность повышения энергетической эффективности машины вытикаетиз того, что во время выполнения технологического процессаправки металла момент статической нагрузки имеет резко изменяющийся характер, принимая наибольшие значения в короткие промежутки времени (непосредственно впроцессе правки). Извесно, что величина потокосцепления в электромеханической системе с векторным управлением влияет на стойкость и энергопотребление.
В дипломном проекте предложено выполнить управление электроприводом таким образом, чтобы потокосцепление приобретало наибольшее значение только непосредственно во время правки, а в другие моменты времени было на минимально допустимом для устойчивой работы уровне, что дает возможность снизить энергопотребление машины на несколько процентов.
4.2 Расчёт и сопоставление капитальных затрат
Исходные данные для технико-экономических расчетов сведены в таблицу 4.1.
Таблица 4.1 – Исходные данные для технико-экономических расчетов
| Исходные данные | Базовый вариант | Новый вариант |
| Должностной оклад оператора До, грн. | ||
| Стоимость оборудования электроприводаЦоб, грн. | ||
| Коэффициент полезного действия двигателяh, % | ||
| Коэффициент использования оборудования по времени Кв | 0,9 | 0,9 |
| Коэффициент использования оборудования по мощностиКм | 0,8 | 0,8 |
Стоимость1 кВт  час электроэнергии для промышленныхпотребителейSэ, грн. час электроэнергии для промышленныхпотребителейSэ, грн.
| 0,51 | 0,51 |
| Количество текущих ремонтов за год | ||
| Количество средних ремонтов за год | ||
| Должностной оклад оператора До, грн. | ||
| Стоимость оборудования электроприводаЦоб, грн. | ||
| Коэффициент полезного действия двигателяh, % | ||
| Коэффициент использования оборудования по времени Кв | 0,9 | 0,9 |
Продолжение таблицы 4.1
| Исходные данные | Базовый вариант | Новый вариант |
| Коэффициент использования оборудования по мощностиКм | 0,8 | 0,8 |
| Стоимость1 кВт час электроэнергии для промышленныхпотребителейSэ, грн.
| 0,51 | 0,51 |
| Количество текущих ремонтов за год | ||
| Количество средних ремонтов за год | ||
| Количество капитальных ремонтов за год | ||
| Экономия энергии за счёт оптимизации алгоритма управления, % | 5,5 |
В экономических расчетах в определении капитальных вложений в средства автоматизации включаютрасчет капитальных вложений по базовому варианту и по проектированному.
К капитальным затратам по каждому варианту электромеханической системы относят:
– стоимость нового оборудования системы;
– стоимость резерва;
– стоимость строительно-монтажных работ, в том числе зарплата;
– транспортные расходы на доставку оборудования;
– заготовительно-складские расходы.
Стоимость резерва составляет 30% от стоимости основного оборудования. Расходы на площадь помещения, где расположено оборудование, транспортные и заготовительно-складские работы принимаются соответственно 20, 6 и1,5% от стоимости основного оборудования. Стоимость строительно-монтажных работ составляет 15% от стоимости основного оборудования (50% от этой суммы составляет зароботная плата).
В общем виде сумма капитальных затрат определяется по формуле
К=Sоб+Sрез+Sпл+Sтр+Sз.с,
где К – капитальные вложения;
Sоб – стоимость оборудования, включая монтажные работы;
Sрез – стоимость резерва;
Sпл – стоимость площади, которую занимает оборудование;
Sтр– транспортные затраты на доставку оборудования;
Sз.с – заготовительно-складские затраты.
Расчитаем капитальные затраты на электрооборудование базового варианта. К основному производственному оборудованию относится асинхронный электродвигатель с короткозамкнутым роторомK21F315L4, випрямитель Sinamics S120 6SL3320-1TE40-1AA0, инвертор Sinamics S120 6SL3320–1TE36–3AA0 и модуль SMC30, необходимый для подключения датчиков. Рыночная стоимость асинхронного двигателя K21F315L4 составляет85000 грн, ориентировочная стоимость випрямителя – 90000 грн, инвертора – 80000 грн, модуля SMC30 для подключения датчиков – 14000 грн.
Таким образом, общая стоимость оборудования по базовому варианту составляет
Цоб= 85000 + 90000 + 80000 + 14000 = 269000 грн.
Затраты на строительно-монтажные работы составляют
Sс.м.р = Цоб 0,15 = 269000 · 0,15 = 40350 грн.
Зарплата строительно-монтажных рабочих
Зс.м = 0,5Sс.м.р = 0,5 · 40350 =20175 грн.
Тогда по оборудованию имеем
Sоб = Цоб + Sс.м.р.= 269000 + 40350 = 309350 грн.
Стоимость резерва
Sрез = Цоб 0,3= 269000 ·0,3 = 80700 грн.
Стоимость площади, которую занимает электрооборудование
Sпл=Цоб 0,2 = 269000 ·0,2 = 53800 грн.
Транспортные затраты на доставку оборудования
Sтр=Цоб 0,06= 269000 ·0,06 =16140 грн.
Заготовительно-складские затраты:
Sз.с=Цоб 0,015= 269000 ·0,015 = 4035 грн.
Общая сумма капитальных затрат по базовому варианту составит
Кбаз=Sоб+Sрез+Sпл+Sтр+Sз.с=309350+ 80700 + 53800 +16140 +4035=464025 грн.
Расчитаем капитальные затрати на электрооборудование нового варианта. Двигатель, выпрямитель и модуль SMC30 остаются из базового варианта. К ним добавляется инверторOmron CIMR – G7CОн имеет класс точности 0,1% и рыночную стоимость приблительно 81850 грн. Стоимость оборудования по новому варианту составит
Цоб=85000 + 90000 + 81850 + 14000 = 270850 грн.
Поскольку новый вариант не предпологает установки мощного и габаритного оборудования, то затраты на строительно-монтажные работы примем в размере 2% от стоимости основного оборудования.
Затраты на строительно-монтажные работы относительно электрооборудования
Sс.м.р = Цоб · 0,02 = 270850 · 0,02 = 5417 грн.
Зарплата строительно-монтажных работников
Зс.м = 0,5Sс.м.р = 0,5 · 5417 = 2708,5 грн.
Вообщем по оборудованию имеем:
Sоб = Цоб + Sс.м.р.= 270850 + 5417 = 276267 грн.
Стоимость резерва
Sрез=Цоб · 0,3 = 270850 · 0,3 = 81255 грн.
Стоимость площади, которую занимает электрооборудование
Sпл=Цоб · 0,2 = 270850 · 0,2 = 54170 грн.
Транспортные затраты на доставку оборудования
Sтр=Цоб · 0,06 = 270850 · 0,06 = 16251 грн.
Заготовительно-складские затраты
Sз.с=Цоб · 0,015= 270850 · 0,015 = 4063грн.
Общая сумма капитальных затрат по новому варианту составит
Кнов=Sоб+Sрез+Sпл+Sтр+Sз.с= 276217+ 81255+ 54170 + 16251+ 4063=431956 грн.
Разница в суммах капитальных затрат объясняется наличием дополнительного оборудования, что устанавливается в новом варианте.
4.3 Расчет и сопоставление эксплуатационных затрат
При расчёте годового экономического эффекта необходимо знать себестоимость единицы продукции в сравнении с базовым вариантом.
Себестоимость продукции – это затраты на производство продукции при каждом производственном цикле её изготовления. Экономия затрат на производство определяется путём сопоставления затрат в базовом варианте и в варианте, что проектируется.
При расчете годовых затрат на производство продукции ко вниманию принимаются следующие технологические изменения:
– в результате проведенной модернизации снижается энергопотребление электромеханической системылистоправильной машины для холодной правки металла;
– система автоматического управления, что внедряется, повышает уровень автоматизации электромеханической системы и выдвигает более жесткие условия к операторам, которые её обслуживают.
Принимая во внимание при расчете годового экономического эффекта перечисленные више изменения, изменяемая часть технологической себестоимости может быть представлена следующим образом
С=Са+ Сэ+ Сзп+ Сро+Сдр,
где Са – годовые амортизационные отчисления;
Сэ – затраты на электроэнергию, что потребляется электроприводом;
Сзп – зарплата персонала, что обслуживает систему управления;
Сро – затрати на ремонт оборудования;
Сдр – другие затрати.
Годовые амортизационные отчисления по каждому варианту расчитывается по формуле
Са=(Nа Цоб)/100,
где Nа – норма амортизационных отчислений (берём 15% для нового и 25% для базового варианта);
Цоб – стоимость основного оборудования.
Амортизационные отчисления:
– по базовому варианту
Са.баз = 25 · 269000/100 = 67250 грн.
– по новому варианту
Са.нов = 15 · 270850/100 = 40627,5 грн.
К амортизационным отчислениям на оборудование следует добавить отчисления на площадь, тогда получим полные амортизационные отчисления за год.
Отчисления на площадь составят:
– по базовому варианту
Са.пл.баз= (10 · 53800)/100 = 5380 грн,
– по новому варианту
Са.плнов = (8 · 54170)/100 = 4333,6 грн.
Норма амортизации для базового варианта 10% и 8% для нового.
Полные амортизационные отчисления:
– по базовому варианту
Сабаз = Са.баз + Са.плбаз = 67250 + 5380 = 72630 грн,
– по новому варианту
Санов = Са.нов + Са.плнов= 40627,5+ 4333,6 = 44961,1 грн.
Расчитаем затраты на электроэнергию, что потребляется:
Се=(Р/h)·Тэф·Ки·Км·Sэ,
где Р – номинальная мощность двигателя, кВт;
h – коэффициент полезного действия электрооборудования;
Тэф – эффективный фонд рабочего времени, час;
Ки – коэффициент использования оборудования по времени;
Км – коэффициент использования оборудования по мощности;
Sе – стоимость 1 кВт час электроэнергии, грн/кВт час.
Используя таблицу4.1, примем коэффициент использования оборудования повремени – 0,9, по мощности – 0,8, коэффициент полезного действия – 0,9,как для базового, так и для нового вариантов. Стоимостьэлектроэнергии в промышленности принимаем0,51 грн/кВт час.
Эффективный фонд времени по обеим вариантам при работе цеха в одну смену составляет
Тэф=8·22·12=2112 час.
Определим затрати на электроэнергию в базовом варианте
Сэ.баз = (325/0,9)·2112·0,96·0,8·0,51 = 298721,3 грн.
В соответствии с выполненными в дипломном проекте исследованиями на математической модели, энергопотребления электромеханической системы с предложенным усовершенствованием снижается в среднем на 5,5%. Поэтому энергопотребление по новому варианту можно вычислить следующим образом
Сэ.нов = 298721,3·(100 – 5,5)/100 = 282291,62.
Модернизация системы управления требует повышения квалификации персонала, что её обслуживает (операторов). Работники находятся на должностных окладах, расчет ведется по формуле
Сзп = До · Кп · Кд · Sм · Кз · n,
где До – должностной оклад оператора, грн;
n – количество операторов, что обслуживают систему управления;
Sм – количество месяцев работи, Sм=12;
Кп – коэффициент, что определяет процент премии до основной зарплаты, Кп=1,15;
Кд – коэффициент дополнительной зарплаты, Кд=1,1;
Кз – коэффициент сменности работы оборудования, Кз=1,4.
Для обслуживания системы управления нужно, чтобы работало два человека Тоесть, один человек в смену при двухсменном режиме работы, поэтому n=2.
Используя исходные данные с таблицы 4.1, определяем зарплату обслуживающего персонала для базовой системы
Сзп.баз= 1800 ·1,15·1,1·12·1,4·2 = 76507,2 грн.
Зароботная плата операторов для модернизированой системы
Сзп.баз=2500·1,15·1,1·12·1,4·2 = 106260 грн.
Рассчитаем затраты на ремонт оборудования.
Стоимость материалов при ремонте можно определить как процент от балансовой стоимости системы по формуле
Сро = (Цоб · НТОиР)/100,
где Цоб – стоимость основного оборудования;
НТОиР – процент отчислений на техническое обслуживание и ремонт, для базового варианта электропривода НТОиР.б.=15%, а для модернизированного – НТОиР.м.=10%.
Таким образом, для базовой системы электропривода затраты на ремонт составят следующее значение
Сро.баз = (269000 · 15)/100 = 40350 грн.
Для модернизированного варианта
Сро.нов = (270850 · 10)/100 = 27085грн.
В смете годовых эксплуатационных затрат другие затраты принимаются в размере 1% от суммы капитальных вложений.
Для базового варианта
Сдр.баз=0,01·Кбаз=0,01·464025= 4640,25 грн.
Для нового варианта
Сдр.нов =0,01·Кнов =0,01·431956= 4319,56 грн.
Для анализа эксплуатационных затрат полученные данные представим в виде таблицы4.2.
Таблица 4.2 – Эксплуатационные затраты
| Наименование затрат | Базовый вариант | Новый вариант |
| Амортизационные отчисления, грн | 44961,1 | |
| Затраты на электроэнергию, что потребляется электроприводом, грн | 298721,3 | 282291,62 |
Продолжение таблицы 4.2
| Наименование затрат | Базовый вариант | Новый вариант |
| Затраты на электроэнергию, что потребляется электроприводом, грн | 298721,3 | 282291,62 |
| Зароботная плата операторов, грн | 76507,2 | |
| Затраты на ремонт оборудования, грн | ||
| Другие затраты, грн | 4640,25 | 4319,56 |
| Суммарные эксплуатационные затраты, грн | 492848,75 | 464917,28 |
Не нашли, что искали? Воспользуйтесь поиском: