ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Перемещение будет определяться разностью конечного и начального радиус-векторов
Dr = r2 - r1, (2.15)
т.е. перемещение это D:\Program Files\Physicon\Open Physics 2.5 part 1\content\chapter1\section\paragraph2\theory.htmlD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\ring_h.gif отрезок прямой, соединяющий начальное положение тела с его последующим.

|
| Рис. 10. Определение положения точки с помощью координат x = x (t), y = y (t) и z = z (t) и радиус–вектора.r (t), r0 – радиус–вектор положения точки в начальный момент времени. |
Перемещение есть векторная величина. Пройденный путь s равен длине дуги траектории, пройденной телом за некоторое время t. Путь – скалярная величина.При движении тела по криволинейной траектории модуль вектора перемещения всегда меньше пройденного пути.

|
| Рис. 11. Траектория и путь. |
При этом путь
Ds= SDr (2.16)
будет равен сумме всех перемещений. Траектория движения материальной точки — линия, описываемая этой точкой в пространстве. В зависимости от формы траектории движение может быть прямолинейным или криволинейным. Для твердого тела добавляются еще три степени свободы вращательного движения, т.е. оно имеет шесть степеней свободы. При движении координаты с течением времени изменяются. Уравнения, характеризующие эти изменения, называются кинематическим уравнениями движения.
ПРИМЕР.
D:\Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifD:\Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\Fwd_h.gifD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\Bwd_h.gif D:\Program Files\Physicon\Open Physics 2.5 part 2\design\images\Fwd_h.gifD:\Program Files\Physicon\Open Physics 2.5 part 2\design\images\Bwd_h.gifЛекция № 3.
3.1. СКОРОСТЬ.
Скоростью движения тела является вектор, характеризующий величину изменения координат тела с течением времени и направление этого изменения. Средней скоростью перемещения называется отношение вектора перемещения к тому промежутку времени, за который это перемещение произошло:
‹v› = ∆r/∆t. (3.1)
При координатномспособе описания вводятся средние значения проекций скорости ‹vx› = ∆x/∆t. ‹vy› = ∆y/∆t. ‹vz› = ∆z/∆t., (3.2)
Мгновенная скорость - это скорость в данный момент времени. Устремив
Dt ® 0, получаем: .v = lim(∆r/∆t) = dr/dt, при ∆t → 0. (3.3).
т.е. вектор скорости точки в данный момент времени равен производной от радиуса-вектора r по времени t. Аналогично определяются проекции вектора скорости: vх = lim(∆х/∆t) = dх/dt, при ∆t → 0. (3.4).
vу = lim(∆у/∆t) = dу/dt, при ∆t → 0. (3.5).
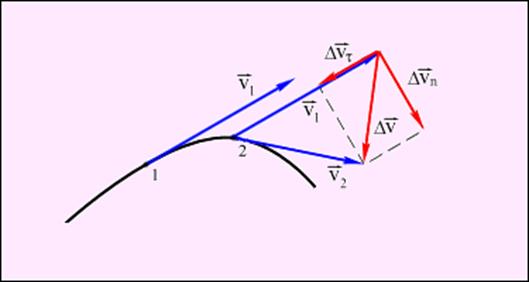
Рис. 12. Изменение вектора скорости по величине и направлению
∆v = ∆vτ + ∆v n – изменение вектора скорости за время ∆t.
Модуль вектора мгновенной скорости легко находится по теореме Пифагора. При двумерном движении .v = √vх2 +.v2у. (3.6).
Графически мгновенная скорость всегда направлена по касательной к траектории движения. Длина пути, пройденного точкой за промежуток времени от t1 до t2, дается интегралом s = ò v(t)dt. (3.7)
D:\Program Files\Physicon\Open Physics 2.5 part 1\content\chapter1\section\paragraph2\theory.htmlD:\Program Files\Physicon\Open Physics 2.5 part 1\design\images\ring_h.gif При движении тела по криволинейной траектории его скорость v изменяется по модулю и направлению. Вектор изменения скорости Δv = v2 – v1 (3.8)
за малое время Δ t можно разложить на две составляющие: Δvτ направленную вдоль вектора v (касательная), и Δvn направленную перпендикулярно вектору v (нормальная).
УСКОРЕНИЕ
Ускорение — это вектор, характеризующий изменение величины и направления скорости с течением времени. Среднее <a> и мгновенное a ускорения определяются как:
<a> = Dv/Dt, a = lim(∆v/∆t) = dv/dt = d2s/dt2, при ∆t → 0. (3.9).
А модуль ускорения a = dv/dt = d2s/dt2. (3.10).
Модуль вектора мгновенного ускорения легко находится по теореме Пифагора. При двумерном движении a = √aх2 +.a2у. (3.11).
При криволинейном движении вектор полного ускорения целесообразно разложить по двум составляющим — тангенциальному ускорению at, направленному по касательной к траектории в сторону изменения скорости, и перпендикулярному нормальному (центростремительному) ускорению an, направленному по радиусу к центру траектории.

|
| Рис.13. Касательное и нормальное ускорения. |
Полное ускорение будет геометрической суммой тангенциальной и нормальной составляющих a = aτ + an. (3.12).
Тангенциальное ускорение отвечает за изменение модуля скорости, а нормальное ускорение — за изменение направления скорости. Величина тангенциального ускорения равна производной от модуля вектора скорости по времени: aτ = dv/dt. (3.13).
Составляющая ускорения, характеризующая быстроту изменения скорости по направлению, называется нормальным ускорением. Она связана с приращением вектора скорости, направленным перпендикулярно касательной к траектории и равна an = v2/R, (3.14).
где R - радиус кривизны траектории. Нормальное ускорение всегда направлено к центру кривизны траектории. Вектор полного ускорения
 (3.15).
(3.15).
Его модуль легко найти по теореме Пифагора: a = √aτ2 +.a2n (3.16).
Дело в том, что и а τ, и а n – каждый имеет свою "специализацию": аτ отвечает за изменение скорости по величине, а аn отвечает за изменение скорости по направлению. Если скорость тела меняется только по величине и, следовательно, сохраняет свое направление, то, в соответствии с определением скорости, мы имеем дело с прямолинейным движением, и его ускорение будет только тангенциальным: aτ = dv/dt. (3.17).
Если же скорость меняется лишь по направлению, а ее величина остается постоянной, то при таком криволинейном движении ускорение все равно будет, но оно полностью нормальное an = v2/R, (3.18).
и в любой момент направлено к центру кривизны траектории:
Не нашли, что искали? Воспользуйтесь поиском: