ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Система управления крупным аэродромом
Система управления полетом самолетов крупного аэродрома включает следующие основные подсистемы: систему дальнего обнаружения и управления, систему многоканальной дальней связи, многоканальную систему слепой посадки и взлета самолетов, систему диспетчеризации и бортовой аппаратуры самолетов.
В состав системы дальнего обнаружения и управления входят радиолокационное оборудование с ЭВМ, аппаратура отображения и выдачи информации наземным системам. Система многоканальной дальней связи состоит из аппаратуры обмена информации с бортом самолета, коммутатора, радиоприемных и передающих устройств.
Многоканальная система слепой посадки и взлета самолетов включает в себя радиолокационное оборудование, аппаратуру съема данных и ввода в ЭВМ, ЭВМ, аппаратуру выдачи и передачи команд на борт самолета. Система диспетчеризации состоит из центральной ЭВМ, аппаратуры ввода данных, коммутатора и устройств отображения информации.
В реальной ситуации любому крупному аэродрому приходится иметь дело не с одиночными самолетами, а с совокупностью самолетов, имеющих специальное распределение моментов влета в зону аэродрома во времени. Такая совокупность самолетов образует поток событий во времени. Для математического описания потоков самолетов, в связи с моделированием процессов функционирования систем обнаружения, обработки информации и взлета-посадки, используют идеи и методы теории массового обслуживания.
В качестве других примеров сложных систем, где используются идеи и методы систем массового обслуживания, можно привести телефонную сеть, таксомоторное хозяйство крупного города, городской пассажирский транспорт, машинно-тракторные парки в сельском хозяйстве и многое другое. Все рассмотренные выше примеры объединяет одно общее свойство - они являются стохастическими объектами вследствие действия случайных факторов. Информационные и материальные потоки в этих системах образуют случайные потоки. Для моделирования таких систем с учетом всех перечисленных выше их особенностей, существующих методов и моделей аналитического вероятностного моделирования в силу их ограниченности недостаточно, а метод имитационного моделирования еще является дорогим и трудоемким. Далее будут рассмотрены стохастические сетевые модели систем, представляющие собой совокупность взаимосвязанных систем массового обслуживания (СМО).
Под методом имитационного моделирования будем понимать способ вычисления статистических характеристик интересующих нас случайных величин посредством воспроизведения реализаций соответствующего случайного процесса с помощью его математической модели. В области управления экономикой, планировании, исследовании операций, проектировании термин «имитационный эксперимент» обозначает способ выбора рационального управления сложным процессом (рационального плана, рациональной конструкции проектируемого изделия) путем сравнивания различных вариантов.
В дальнейшем будем различать аналитическое вероятностное моделирование от имитационного моделирования в том смысле, как различаются теория вероятностей и математическая статистика.
В настоящее время существует несколько десятков специализированных имитационных систем моделирования или же проблемно – ориентированных систем, и их число растет. В таблице 3 приведены известные зарубежные системы имитационного моделирования и их краткая характеристика.
Таблица 3
| № | Название | Краткая характеристика | Ориент. цена, $ |
| CSSL-IY (Continious System Simulation Language) | Для моделирования непрерывных систем, описанных дифференциальными уравнениями | ||
| DESCTOP | Непосредственная симуляция, экранный редактор, цветная графика | ||
| DSL (Dynamic Simulaion Language) | Для моделирования систем, описанных обычными дифференциальными уравнениями | ||
| DYNAMO III | Язык непрерывного моделирования | ||
| CASP V (General Activity Simulation Program) | Язык дискретного и непрерывного моделирования с интерактивными возможностями | ||
| GPSS (General Purpose Simulation System) | Язык дискретной процессорно- ориентированной симуляции | 4000-7500 | |
| GVS (General Visual System) | Для симуляции авиационных систем | ||
| INSIGHT | Для дискретной событийно-ориентированной симуляции | ||
| MAST (Manufacturing System Desing Tool) | Для симуляции ГПС | ||
| Network II | Симулятор сетей – средство для проектирования и анализа вычислительных и коммуникационных систем | ||
| PASSIM | Пакет для событийно-ориентированной симуляции | ||
| SEE WHY | Система визуальной интерактиной событийно-ориентированной симуляции | ||
| SIMAN Simularion Analysi | Для симуляции характеристик производственных систем | ||
| SIMKIT | Дискретная событийно-ориентированная симуляция в среде экспертной системы | ||
| SIMSCRIPT II | Для дискретной событийно-ориентированной симуляции | ||
| SLAM II | Для различных видов дискретного моделирования | ||
| TESS | Система поддержки моделирования с базой данных и инженерной графикой | ||
| Средняя стоимость - $9000…11000 |
Применение их отличает большая трудоемкость (время составления модели плюс время расчета на ЭВМ), а также ограниченная эффективность (произведение дисперсии ошибки на время моделирования). С другой стороны, с ростом быстродействия современных ЭВМ, развитием информационных технологий и созданием интерактивных систем моделирования трудоемкость процесса моделирования будет уменьшаться, но все же трудоемкость имитационного моделирования останется выше, чем аналитического.
В связи с бурным развитием вычислительной техники и информационных технологий, с появлением многоуровневых систем программирования и моделирования, математическое моделирование (аналитическое вероятностное и имитационное) как технология все более будет походить на обычную производственную технологию.
Лекция 3. Инструментальные средства моделирования ОиСУ.
Пакет визуального моделирования Simulink
Одной из самых сложных проблем в реализации математического моделирования в среде MATLAB является подготовка модели моделируемой системы или устройства. Модель обычно представляется в форме графического, табличного или таблично-топологического описания. При этом необходимо предусмотреть организацию связей между компонентами и установку их параметров. После этого нужно запустить модель на исполнение, т. е. задать решение автоматически составленной системы уравнений состояния и вывод результатов решения, что зачастую представляет собой достаточно сложную задачу.
Все вышеупомянутые проблемы эффективно решаются при помощи расширения Simulink – важной составной части системы MATLAB. Это расширение реализует визуально-ориентированное программирование задач автоматического составления графической модели системы или устройства, составления и решения уравнений состояния и наглядного представления результатов моделирования. Пакет Simulink позволяет выполнять симуляцию работы моделируемых систем и устройств, т. е. осуществлять имитационное моделирование.
Новые версии Simulink интенсивно развиваются в направлении развития техники моделирования систем и устройств, структура которых может изменяться под воздействием ситуаций, которые характерны для работы устройств в те или иные моменты времени. Другими словами, развивается направление ситуационного моделирования. Специальное расширение StateFlow BlockSet обеспечивает расширенные возможности ситуационного моделирования – в частности позволяет в динамике отслеживать связи между блоками моделей и строить наглядные SF-диаграммы.
Пакет Simulink является ядром интерактивного программного комплекса, предназначенного для математического моделирования линейных и нелинейных динамических систем и устройств, представленных своей функциональной блок-схемой, именуемой S-моделью или просто моделью. При этом возможны различные варианты моделирования: во временной области, в частотной области, с событийным управлением, на основе спектральных преобразований, с использованием метода Монте-Карло (реакция на воздействия случайного характера) и т. п.
Для построения функциональной блок-схемы моделируемых устройств Simulink имеет обширную библиотеку блочных компонентов (рис. 1) и удобный редактор блок-схем. Он основан на графическом интерфейсе пользователя и по существу является типичным средством визуально-ориентированного программирования. Используя палитры компонентов (наборы), пользователь с помощью мыши переносит нужные блоки с палитр на рабочий стол пакета Simulink и соединяет линиями входы и выходы блоков. Таким образом, создается блок-схема системы или устройства, то есть модель. 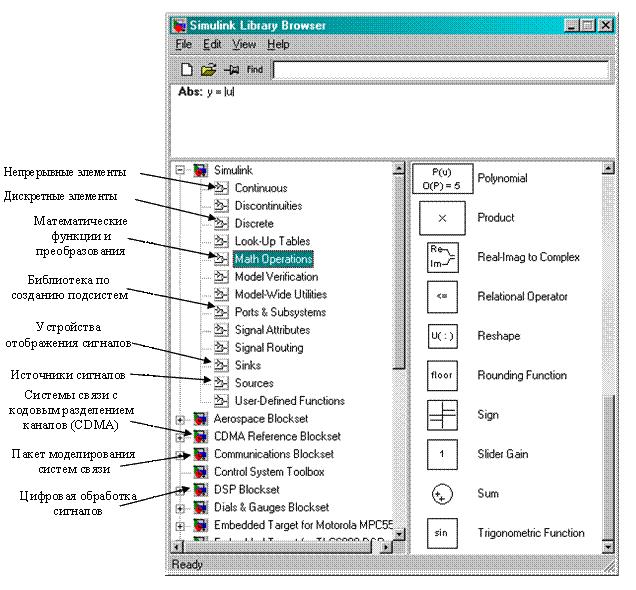
Рис. 1 - Основные библиотеки пакета Simulink
Simulink автоматизирует следующий, наиболее трудоёмкий этап моделирования: он составляет и решает сложные системы алгебраических и дифференциальных уравнений, описывающих заданную функциональную схему (модель), обеспечивая удобный и наглядный визуальный контроль за поведением созданного пользователем виртуального устройства – достаточно уточнить (если нужно) вид анализа и запустить Simulink в режиме симуляции созданной модели системы или устройства.
Ценность пакета Simulink заключается и в обширной, открытой для изучения и модификации библиотеке компонентов (блоков). Она включает источники сигналов с практически любыми временными зависимостями, масштабирующие, линейные и нелинейные преобразователи с разнообразными формами передаточных характеристик, квантующее устройство, интегрирующие и дифференцирующие блоки и т. д. Кроме этого пакет Simulink включает в себя отдельные специализированные библиотеки, наиболее полезными из которых являются пакет для моделирования систем передачи дискретных сообщений (Communications Blockset) и пакет для моделирования систем цифровой обработки сигналов (DSP Blockset).
Программные средства моделирования динамических систем известны давно, к ним относятся, например, программы Tutsim и LabVIEW for Industrial Automation. Однако для эффективного применения таких средств необходимы высокоскоростные решающие устройства. Интеграция системы MATLAB с пакетом Simulink открывает новые возможности использования самых современных математических методов для решения задач динамического и ситуационного моделирования сложных систем и устройств.
Средства графической анимации Simulink позволяют строить виртуальные физические лаборатории с наглядным представлением результатов моделирования. Возможности Simulink охватывают задачи математического моделирования сложных динамических систем в физике, электро- и радиотехнике, биологии и других областях науки и техники. Этим объясняется популярность данного пакета как в вузах, так и в научных лабораториях.
Важным достоинством пакета Simulink является возможность задания в блоках произвольных математических выражений, что позволяет решать типовые задачи, пользуясь примерами пакета Simulink или же просто задавая новые выражения, описывающие работу моделируемых пользователем систем и устройств. Важным свойством пакета является возможность задания системных функций (S-функций) с включением их в состав библиотек Simulink. Необходимо также отметить возможность моделирования устройств и систем в реальном масштабе времени.
Как программное средство Simulink – типичный представитель визуально-ориентированных языков программирования. На всех этапах работы, особенно при подготовке моделей систем, пользователь практически не имеет дела с обычным программированием. Программа в кодах автоматически генерируется в процессе ввода выбранных блоков компонентов, их соединений и задания параметров компонентов.
Важное преимущество Simulink – это интеграция не только с системой MATLAB, но и с рядом других пакетов расширения, что обеспечивает, по существу, неограниченные возможности применения Simulink для решения практически любых задач имитационного и событийного моделирования.
На рис. 2 также показан пример маскирования подсистемы: маскируемая подсистема выделяется нажатием левой клавиши мыши, в меню Edit выбирается опция Mask Subsystem и после этого появляется окно, показанное 
Рис.2 - Редактор маскирования подсистемы
на рис. 2 справа внизу, где можно задавать параметры маскируемой подсистемы. Далее выбирается панель Initialization, где в окне Prompt вводится наименование параметра подсистемы, которое будет в дальнейшем отображаться в виде, показанном на рис. 2 слева внизу (Carrier_Wave(Hz)) (можно задавать до 12 параметров), а в окне Variable задается, описывающая этот же параметр, переменная, которая в дальнейшем вводится в окна параметров различных блоков. Таким образом, маскирование подсистемы позволяет задавать глобальные переменные, относящиеся ко всей подсистеме.
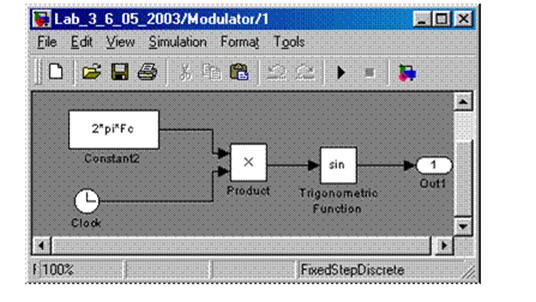
Рис. 3 - Имитационная модель ФМн модулятора «1»
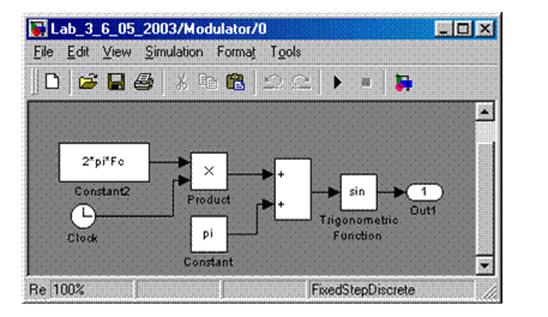
Рис. 4 - Имитационная модель ФМн модулятора «0»
На рис. 3,4 показана имитационная модель дискретной системы связи. При этом модулятор в этой системе представляет собой формирователь фазоманипулированных сигналов генерируемых блоками с именами «1» и «0», которые также в свою очередь являются подсистемами. В зависимости от того, какой уровень (1 или 0) поступает на вход модулятора, на его выходе формируется либо синус с нулевой начальной фазой, либо синус с фазой сдвинутой на 180°.
Малоопытный пользователь, скорее всего, при переходе к моделированию своих систем или устройств, столкнется с множеством неожиданных ошибок. Наиболее характерными из них являются:
– неверное задание параметров моделей;
– нестыковка входных, выходных и управляющих параметров блоков;
– несоответствие блоков по типу;
– ошибочные записи математических выражений;
– неверный выбор метода моделирования и т. д.
Никакая, даже самая обширная фирменная документация не способна отразить все нюансы ошибочного применения системы MATLAB с её пакетами расширения. Поэтому ограничимся лишь некоторыми общими рекомендациями.
Довольно часто причиной ошибок является несоответствие типов блоков и их входных и выходных параметров. В таких случаях надо предусматривать переходные элементы. Наглядный пример – переход от тока к напряжению включением резистора 1 Ом в цепь тока.
Особенно часто нестыковка блоков наблюдается при совместном использовании блоков из разных пакетов расширения, например, из пакетов Power System и Simulink. Размерные величины, используемые в пакете Power System Blockset, зачастую недопустимы для блоков Simulink, использующих безразмерные величины (например, при задании функций).
По-видимому, стоит разумно ограничить применение компонентов из различных пакетов расширения. Как показывает практика, каждый из пакетов расширения имеет довольно широкую сферу применения и позволяет решать множество практически полезных задач. Совместное применение нескольких пакетов расширения системы MATLAB+Simulink требует длительной практики работы в этой системе. Наименьший риск натолкнуться на трудности моделирования имеет место при использовании пакетов расширения группы Blockset, отнесенной к сфере прямого применения с расширением Simulink.
Важным обстоятельством для пользователей MATLAB является тот факт, что система тщательно диагностирует подготовленную модель и допускает её исполнение только после устранения всех обнаруженных ошибок. Сообщения об ошибках появляются в специальных окнах системы. Они достаточно подробны и позволяют наметить меры по устранению ошибок.
Поэтому стоит отметить, что примеры имитационных моделей, приведенные в литературе и в справочной базе данных MATLAB, нуждаются не просто в просмотре, а во внимательном их изучении, а также анализе получаемых выходных результатов моделирования.
В учебном пособии изложены основы математического моделирования и его применения при описании сигналов и помех в телекоммуникационных системах. Изложение базируется на теории случайных процессов и полей. Наибольшее внимание уделено тем моделям, которые адекватно описывают процессы в системах связи и широко используются при имитации дестабилизирующих воздействий. Рассмотрены общие подходы и конкретные алгоритмы моделирования случайных процессов и полей, адекватно описывающих процессы в реальных системах: случайные потоки в СМО, различные виды помех в системах радиосвязи, замирания в системах мобильной связи. Для удобства моделирующие алгоритмы сведены в таблицы. Представлены характеристики сигналов и систем, обобщенные модели дискретных и непрерывных каналов связи. Приведены методы построения моделей на основе экспериментальных данных и соответствующие методы проверки их адекватности. Кратко описана программная среда MATLAB и пакет визуального моделирования Simulink.
Не нашли, что искали? Воспользуйтесь поиском: