ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Построение и моделирование демодуляторов ЧМн-сигнала в пакете Simulink программы Matlab.
Пакет SimuLink позволяет осуществлять моделирование поведения динамических х систем. В этом разделе мы не будем подробно описывать этот пакет, ибо это давно сделано в большом числе удачных работ (например книги В.П.Дьяконова и др.), а ограничимся лишь рассмотрением примеров моделирования реальных устройств.
В пакете SimuLink ввод характеристик исследуемых систем производится в диалоговом режиме, путем графической сборки схемы соединений элементарных стандартных звеньев. В результате такой сборки формируется модель исследуемой системы. Модель хранится в файле с расширением .mdl. Создание моделей в пакете SimuLink основано на использовании технологии Drag-and-Drop. В качестве "кирпичиков" для построения модели применяются модули или блоки, хранящиеся в библиотеке SimuLink. Любая модель может иметь иерархическую структуру, т.е. состоять из моделей более низкого уровня, причем число уровней иерархии практически не ограничено. В ходе моделирования имеется возможность наблюдать за процессами, происходящими в системе. Для этого используются специальные просмотровые окна, входящие в библиотеки SimuLink. Состав библиотек SimuLink может быть пополнен пользователем за счет разработки собственных блоков.
Рассмотрим модель блока формирования ЧМн – сигнала.
Формирование ЧМн – сигнала показано на рис.5.

Рис.5.
Для описания формирователя создается функция в виде m-файла, содержание которой следущее:
function f=my(t,tp,fp,a);
if a>0
f=fp+(t-tp)*(128e3+5.092958e6)*2*pi;
else
f=fp+(t-tp)*(-128e3+5.092958e6)*2*pi;
end
Здесь t- модельное время, tp – задержка на шаг модельного времени, fp- значение круговой частоты на предыдущем шаге модельного времени, а- информационный сигнал.
Пример приведен для скорости передачи информации, равной 256 кбит/сек. А несущая цифровая частота равна 32МГц
Опишем используемые блоки:
Clock — источник непрерывного временного сигнала;
Блок Memory (Память) выполняет задержку сигнала только на один шаг модельного времени. Блок имеет два параметра настройки: Initial condition (Начальное условие) — задает значение входного сигнала в начальный момент времени; опция Inherit sample time (Наследование шага времени) позволяет выбрать величину шага, на который будет производиться задержка сигнала. Если опция не задана, то используется минимальная задержка, равная 0,1 единицы модельного времени. Если опция установлена, то величина задержки равна значению дискрета времени блока, предшествующего блоку Memory.
Блок MATLAB Fсn позволяет применить к входному сигналу любую подпрограмму обработки, реализованную в виде М-файла. В отличие от предыдущего блока, здесь к числу параметров настройки добавлен параметр Output width (разрядность выходного сигнала), который определяет число элементов выходного вектора.
Блок Мuх (Концентратор) выполняет объединение входных величин в один выходной вектор. При этом входные величины могут быть как скалярными, так и векторными. Длина результирующего вектора равна сумме длин всех суммируемых векторов. Порядок элементов в векторе выхода определяется порядком входов (сверху вниз) и порядком расположения элементов внутри каждого входа. Блок имеет один параметр настройки — Number of inputs (Число входов).
Блок Trigonometric Function обеспечивает преобразование входного сигнала с помощью одной из следующих функций: sin, cos, tan, asin, acos, atan, atan2,sinh, cosh, tanh. Выбор функции производится в окне настройки блока с помощью списка.
Random Number — источник дискретного сигнала, амплитуда которого является случайной величиной, распределенной по нормальному закону.
Блок Sign реализует нелинейность типа знаковой функции. В нем нет параметров настройки. Блок формирует выходной сигнал, принимающий только три возможных значения: +1—в случае, когда входной сигнал положителен, -1 — при отрицательном входном сигнале и 0 — при входном сигнале равном нулю.
Формирование квадратур осуществляется с помощью генератора несущей частоты и тригонометрических функций (sin, cos), а также следующих блоков см. рис. 6: 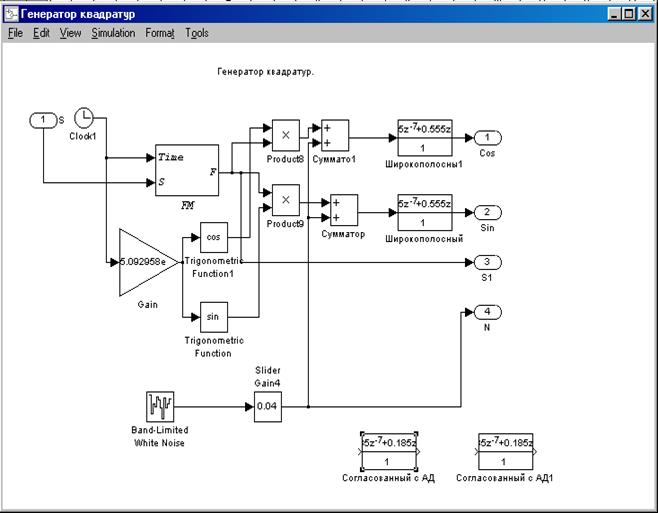
Рис.6.
Здесь применены следующие узлы.
Gain — линейное передаточное звено. С помощью этого звена задается круговая несущая частота для формирования двух квадратур.
Sum — звено-сумматор;
Блок Product выполняет умножение или деление нескольких входных сигналов. В параметры настройки входят число входов блока и вид выполняемой операции. Задание значений этих параметров аналогично настройке блока Sum из раздела Linear. Если в качестве значения параметра настройки блока ввести 1, то будет вычисляться произведение элементов входного вектора. При этом на изображении блока выводится символ "Р".
Discrete Filter — блок задания дискретного звена через дискретную передаточную дробно-рациональную функцию относительно l/z. Пример расчета значений коэффициентов фильтра был приведен в предыдущем разделе.
Рассмотрим формирование белого шума.
Шум смешивается с сигналом до цифровых фильтров. Формируется шум с помощью двух блоков.
Блок Band-Limited White Noise. Этот блок формирует процесс в виде частотно-ограниченного белого шума. Параметры настройки у него следующие: Noise power — значение мощности белого шума; Sample time — значение интервала дискретизации (определяет верхнее значение частоты процесса); Seed — начальное значение базы генератора случайной величины. Для нашей модели значения следующие: мощности белого шума = 0.0000001 Вт; значение дискрета времени = 0.00000001 (100 МГц), начальное значение базы генератора случайной величины = 23341.
Slider Gain — звено интерактивного изменения коэффициента усиления. Блок Slider Gain является одним из элементов взаимодействия пользователя с моделью. Он позволяет в удобной форме изменять в процессе моделирования значение некоторого параметра. Блок становится активным после того, как будет помещен в окно блок-схемы. Окно Slider Gain имеет три поля ввода, которые задают:
-- нижний предел изменения параметра (Low);
-- верхний предел изменения параметра (High);
-- текущее значение.
Текущее значение должно лежать внутри диапазона [Low, High].При выборе нового диапазона необходимо вначале указать новое этого значение параметра, а затем изменить границы диапазона. Для нашей модели значения следующие: нижний предел изменения параметра =0; верхний предел изменения параметра =0,1; текущее значение – определяет ОСШ на входе, порядок 10-8 Вт.
Наблюдать за значением ОСШ на входе можно с помощью блока, который формирует это отношение (рис. 7) и состоит из следующих сублоков:

Рис. 7
Блок Display с одним входом, предназначенный для отображения численных значений входной величины;
Continuous RMS - вычисляет среднеквадратическое значение входной величины. Выходная величина непрерывна.
Блок Fсn позволяет пользователю ввести любую скалярную функцию от одного (скалярного или векторного) аргумента, выражающуюся через стандартные функции MatLAB. Выражение функции вводится в окне настройки блока. Для обозначения входного сигнала (аргумента функции) используется символ "u".
Рассмотрим моделирование работы различных схем демодуляторов ЧМн-сигнала, подобного описанному в разделе 1.2.
Реализация схемы дискриминатора нулевых биений приведена на рис. 8. 
Рис.8
Опишем используемые блоки и их параметры:
Блок Transport Delay обеспечивает задержку сигнала на заданное количество шагов модельного времени, причем не обязательно целое. Настройка блока происходит по трем параметрам: Time delay (Время задержки) — количество шагов модельного времени, на которое задерживается сигнал; может вводиться либо числовой форме, либо в форме вычисляемого выражения; Initial input (Начальное значение входа) — по умолчанию равно 0; Initial buffer size (Начальный размер буфера) — объем памяти (в байтах), выделяемой в рабочем пространстве MatLAB для хранения параметров задержанного сигнала; должно быть кратно 8 (по умолчанию — 1024).
Время задержки выбирается из расчета предыдущего отсчета значения входной величины, которое в свою очередь, зависит от количества анализируемых отсчетов входного сигнала. Отсчеты берутся через интервал, равный частоте дискретизации = 4МГц., т.е. время задержки равно  При моделировании было установлено, что для увеличения помехоустойчивости, количество анализируемых отсчетов целесообразно брать не более 3, т.к. дальнейшее увеличение не ведет к улучшению помехоустойчивости и, по существу, не целесообразно.
При моделировании было установлено, что для увеличения помехоустойчивости, количество анализируемых отсчетов целесообразно брать не более 3, т.к. дальнейшее увеличение не ведет к улучшению помехоустойчивости и, по существу, не целесообразно.
Реализация схемы корреляционного приемника приведена на рис. 9. 
Рис. 9
Для моделирования такого детектора используются следующие блоки:
Блок Abs формирует абсолютное значение входного сигнала. Он не имеет параметров настройки.
Вместо интеграторов в схеме используются ФНЧ-фильтры с полосой пропускания согласованной со скоростью передачи данных (это ведет к потере помехоустойчивости не более 3 дБ). Как известно, полосу цифрового фильтра можно задавать изменяя частоту дискретизации (задержку). Т.о. реализация этой схемы имеет некоторые особенности, что, видимо, повлияло на результаты моделирования
Результаты моделирования выводились на блок Scope (Индикатор), который позволяет в процессе моделирования наблюдать интересующие исследователя процессы. Размер и пропорции этого окна можно изменять произвольно, используя мышь. По горизонтальной оси откладываются значения модельного времени, а по вертикальной — значения входной величины, соответствующие этим моментам времени. Если входная величина блока Scope представляет собой вектор, в окне строятся графики изменения всех элементов этого вектора, т.е. столько кривых, сколько элементов во входном векторе, причем каждая — своего цвета. Одновременно в окне может отображаться до 30 кривых.
Для повышения помехоустойчивости применяется система тактовой синхронизации (СТС). Рассмотрим реализацию модели СТС. Устройство синхронизации с нелинейным фильтром (разомкнутого типа) приведено на рис. 10.

Рис.10
Роль «нелинейного фильтра» играют входные цифровые фильтры. В качестве полосового фильтра используется ФНЧ – фильтр, а в качестве компаратора использован блок Sign.
Устройство синхронизации с опережающим и запаздывающим стробированием (замкнутого типа) приведено на рис. 11. 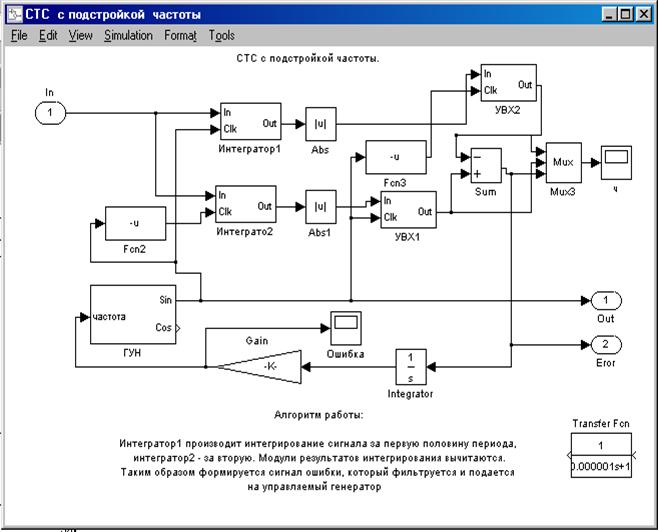
Рис.11
Известно, что схемы за слежением фазы входного сигнала обладают большей точностью определения частоты чем схемы слежения за частотой. Это понятно из алгоритмов их функционирования, т.к. схемы за слежением фазы входного сигнала могут обеспечить какую-то постоянную ошибку по фазе входного сигнала и нулевую ошибку по частоте. Схемы слежения за частотой входного сигнала могут лишь обеспечить постоянную ошибку по частоте. Однако, слежения за частотой входного сигнала обладают большей полосой захвата, поэтому применяются гибридные – частотно-фазовые системы синхронизации.
Как видим, моделирование с использованием пакета Simulink позволяет исследовать широкий класс объектов радиотехнических систем.
Лекция 4
Не нашли, что искали? Воспользуйтесь поиском: