ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
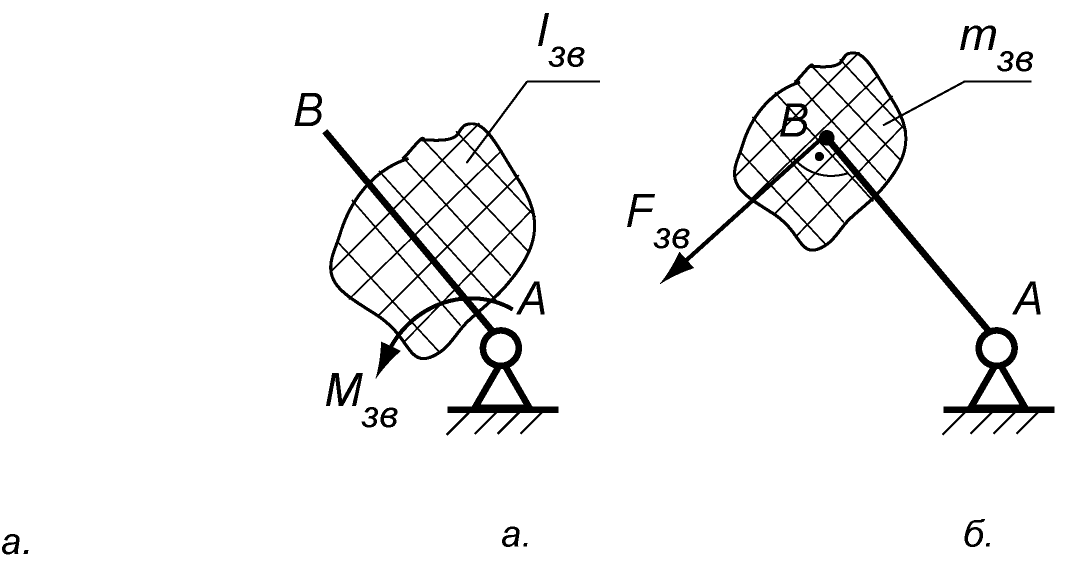
Зведена сила (зведений момент сили).
|
Зведена сила (зведений момент сили) – це розрахункова сила (момент сили), що прикладена до ланки зведення, миттєва потужність якої дорівнює сумі миттєвих потужностей усіх сил, що діють на ланки механізму

44. Рівняння руху механізму.
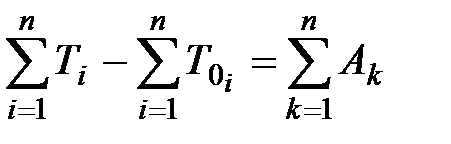 в інтегральній формі
в інтегральній формі

|
в диференціальній формі

|
45. Режими руху механізму. Усталений рух

|
Усталеним рухом називається рух, за якого циклічно змінюється узагальнена координата та її похідні за часом.
Циклом (періодом) усталеного руху називається найменший відрізок часу, по закінченні якого узагальнена координата та її похідні за часом приймають початкове значення.
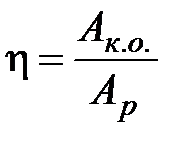
46. Механічний коефіцієнт корисної дії МАШИНИ
Це відношення роботи сил корисного опору до роботи рушійних сил за цикл усталеного руху.
 при поступальному з’єднанні
при поступальному з’єднанні
 при паралельному ….
при паралельному ….
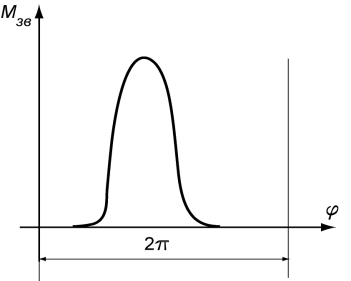
47. Графоаналітичний метод розв’язання рівняння руху механізму (метод М.І. Мерцалова)
Застосовується тоді, коли зведені моменти рушійних сил і сил корисного опору є однорідними, а саме, функціями положення:
 .
. 
В якості двигуна для робочої машини в цьому випадку застосовується двигун внутрішнього згоряння.

|
Запишемо рівняння руху механізму в інтегральній формі (1-ша і 2-га форми запису):
Для розв'язання цього рівняння спочатку побудуємо графіки  (п.7.6) і
(п.7.6) і  (п.7.7), причому графік
(п.7.7), причому графік  будуємо для робочої машини (прес, насос, конвеєр, верстат тощо), а для машини-двигуна будуємо графік
будуємо для робочої машини (прес, насос, конвеєр, верстат тощо), а для машини-двигуна будуємо графік  - (рис. 7.11, а) і (рис. 7.11, б).
- (рис. 7.11, а) і (рис. 7.11, б).

|
Для побудови графіка моменту рушійних сил  треба графічно продиференціювати графік роботи рушійних сил
треба графічно продиференціювати графік роботи рушійних сил  .
.
Для побудови графіка суми робіт зведених моментів сил  необхідно від ординат графіка відібрати ординати графіка
необхідно від ординат графіка відібрати ординати графіка  , різниця і є
, різниця і є
48. Задачі регулюванння періодичних коливань швидкості. Механіка роботи маховика
Задачею регулювання ПКШ є підтримання періодичних коливань швидкості в межах, заданих коефіцієнтом нерівномірності руху  .
.
Механіка роботи маховика

|
Запишемо момент сил інерції маховика:
і рівняння руху маховика в диференціальній формі:

|
Відомо, що  .
.
Коефіцієнт нерівномірності руху.
При усталеному русі періодично змінюється швидкість головної ланки машини, за яку, зазвичай, приймається вал кривошипа.
Міра коливань швидкості визначається коефіцієнтом нерівномірності руху:
 - -
|
це відношення різниці між найбільшою та найменшою швидкостями за цикл усталеного руху до середньої швидкості (інакше: відношення розмаху коливань кутової швидкості до її середнього значення).
 . .
|
На практиці доведено, що той чи інший технологічний процес може задовільно виконуватися, якщо коефіцієнт нерівномірності руху для кожної машини знаходиться в певних межах
50.Задачі зрівноважування та віброзахисту машин.
1,Зменшення тиску стояка на фундамент чи основу.
2,Зменшення зусиль у кінематичних парах механізму.
3,Зменшення параметрів коливань до меж, безпечних для оточуючого середовища та обслуговуючого персоналу
51.Умови зрівноваженості обертової ланки.
Залежно від положення центра мас обертового ротора на підшипники може передаватися додаткове навантаження від сили інерції мас.
 , ,
|
Відцентрова сила інерції точкової маси дорівнює:
 . .
|
система буде зрівноважена, якщо:
Висновки:Обертова ланка буде зрівноважена, тобто в кінематичних парах не будуть виникати динамічні зусилля, якщо вісь обертання цієї ланки є центральною і однією з головних осей інерції, тобто вільною віссю обертання.Обертову ланку можна зрівноважити двома додатковими масами (противагами), які розміщені в двох довільно вибраних паралельних площинах.
52.Статичне та динамічне балансування обертових мас.
При статичному балансуванні центр мас ланки зміщують на вісь обертання. Умова статичної зрівноваженості:
 . .
|
Статичне балансування виконують для деталей, у яких довжина циліндра менша від його діаметра. Задачею балансування в цьому випадку буде визначення такої додаткової маси (противаги), нормальна сила інерції якої зрівноважить силу  .
.
При динамічному балансуванні одну з головних осей інерції ланки суміщають з віссю обертання. Умова динамічної зрівноваженості:
. 
|
Динамічне балансування проводять на спеціальних верстатах (рис. 8.3) для деталей, довжина циліндра яких досить велика порівняно з його діаметром:  .
.
Задача балансування у цьому випадку – визначення таких двох додаткових мас (противаг), нормальні сили інерції яких зрівноважать сили  і
і  , які складають “хрест сил”.
, які складають “хрест сил”.
53. Зрівноважування механізмів на фундаменті.
Механізм вважається зрівноваженим, якщо зусилля, що передаються на фундамент є стала величина, тобто якщо головний вектор і головний момент зусиль стояка на фундамент є стала величина.
 
|
Якщо досягти, щоб  і
і  , тоді механізм буде зрівноваженим.
, тоді механізм буде зрівноваженим.
Досягти цієї умови повністю важко, тому частіше прагнуть, щоб , тобто здійснюють статичне зрівноважування механізму
54. Віброзахист машин. Засоби віброзахисту.
Дія віброізоляції зводиться до послаблення зв'язків між джерелом коливань і об'єктом; при цьому зменшуються динамічні дії, які передаються об'єкту.
Віброізоляція основана на розділенні початкової системи на дві частини та поєднанні цих частин віброізолятором чи амортизатором.
Одна з цих частин називається об'єктом, що амортизується, друга – основою.
55. Види кулачкових механізмів та області їх застосування.
Як і всі механізми, кулачкові механізми (КМ) можуть бути плоскими та просторовими, центральними та позацентровими. Вони поділяються також за видом руху кулачка та штовхача.
Кулачковий механізм є плоским, якщо його ланки рухаються в паралельних площинах.
Кулачковий механізм є просторовим, якщо його ланки рухаються в площинах, що перетинаються.
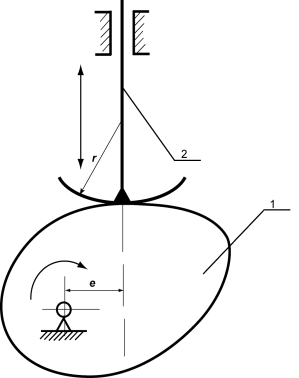
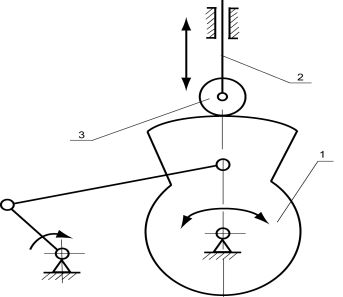
Кулачковий механізм є центральним, якщо вісь руху штовхача проходить через центр обертання кулачка (рис. 10.2, 10.8), та позацентровим, якщо вона не проходить через центр обертання кулачка (рис. 10.3...10.5).
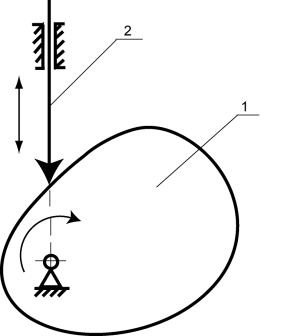
Рух кулачка 1 кулачкового механізму може бути поступальним (рис. 10.1), обертальним (рис. 10.2...10.7) і хитним (рис. 10.8).
Рух штовхача 2 може бути поступальним (рис. 10.1...10.5, 10.8) і хитним (рис. 10.6, 10.7).
У кулачкових механізмах, наведених на рис. 10.2 і 10.3, кулачок діє безпосередньо на штовхач, причому під час руху ланок елементи кінематичних пар ковзають один по одному. Найбільшому зносу підлягають елементи вищої кінематичної пари в механізмі, наведеному на рис. 10.2, тому що тут одна точка штовхача ковзає по поверхні кулачка, і питомий тиск дуже великий.
При застосуванні “грибовидного” штовхача (рис. 10.3) знос поверхні кулачка трохи зменшується. Якщо радіус кривизни поверхні “грибовидного” штовхача збільшити до нескінченності, то елемент кінематичної пари перетворюється на площину, а кулачковий механізм – у кулачковий механізм з плоским поступально рухомим штовхачем (рис. 10.4).

| 
|
| Рис. 10.1. Кулачковий механізм (КМ) з поступально рухомими кулачком і штовхачем | Рис. 10.2. Центральний КМ із гострим штовхачем |
| 
|
| Рис. 10.3. Позацентровий КМ із “грибовидним” штовхачем | Рис. 10.4. Позацентровий КМ із плоским “тарілчастим” штовхачем |

| 
|
| Рис. 10.5. Позацентровий КМ із роликовим штовхачем | Рис. 10.6. КМ із коромисловим роликовим штовхачем |

| 
|
| Рис. 10.7. КМ із коромисловим плоским штовхачем | Рис. 10.8. КМ із хитним кулачком |
56 Основні закони руху вихідної ланки кулачкового механізму.
Стала швидкість: Такий закон характеризується “жорсткими” ударами; сили, що діють на ланки механізму, різко зростають (теоретично прагнуть до нескінченності). Цей закон є суто теоретичним
Стале прискорення: За цього закону вихідна ланка (штовхач) рухається з м'якими ударами на початку та наприкінці свого ходу.
Трикутний закон змінення прискорення: Цей закон характеризується м'якими ударами кулачка і штовхача
Косинусоїдальний закон змінення прискорення: Цей закон характеризується м'якими ударами на початку та наприкінці руху штовхача
Синусоїдальний закон зміненняприскорення: Цей закон є ідеальним, тому що за цього закону немає жодних ударів – ні жорстких, ні м'яких
57. Кути тиску та передачі руху кулачкового механізму
Кутом тиску називається гострий кут у точці контакту між вектором швидкості штовхача та нормаллю до профілю кулачка.
Кутом передачі називається кут між абсолютною та відносною швидкостями в точці контакту кулачка та штовхача
58 Визначення основних розмірів кулачкового механізму
Не нашли, что искали? Воспользуйтесь поиском: