ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Сполучення характеристик дизеля і гідромеханічної трансмісії
У сільськогосподарського тракторах сполучають регуляторну характеристику дизеля і характеристику гідромуфти або комплексної гідропередачі.
Сполучення характеристик залежить від самих характеристик і технологічного призначення трактора. Так, двигун може мати регуляторну характеристику зі стандартним запасом крутного моменту або з ділянкою постійної потужності. Характеристики гідропередач розрізняються залежно від передачі, а також усередині одного типу. Важливими параметрами, що впливають на сполучення, є прозорість і коефіцієнт трансформації гідропередачі, які можуть бути різними як для різного типу гідромуфт, так і для комплексних передач різної конструкції.
На рис. 6.7 наведені різні варіанти сполучення регуляторної характеристики дизеля з характеристикою гідромеханічної трансмісії.

Рис. 6.7. Характеристики спільної роботи дизеля з гідротрансформатором:
а – з непрозорою характеристикою; б – із прозорою характеристикою;
––– – з гідромуфтою; 1 – зона максимальної потужності; 2 – зона високої паливної економічності
У сполученні з механічною ступінчастою трансмісією двигун залежно від навантажувального режиму на валу муфти зчеплення може працювати в будь-якій крапці регуляторної характеристики. Робота дизеля в сполученні з гідродинамічною трансмісією відрізняється наступної. При всіх варіантах сполучення правою границею узгодження є залежність крутного моменту на насосному колесі від кутової швидкості вала  при
при  , а ліва – ця ж залежність при
, а ліва – ця ж залежність при  . Незалежно від значення крутного моменту (навантаження) на турбінному, колесі двигун буде працювати в зоні, обмеженої залежностями . На характеристиці моменту турбіни
. Незалежно від значення крутного моменту (навантаження) на турбінному, колесі двигун буде працювати в зоні, обмеженої залежностями . На характеристиці моменту турбіни  (рис. 6.5) це крайні крапки абсциси:
(рис. 6.5) це крайні крапки абсциси:  і . Ліва границя відповідає 100% взаємному ковзанню коліс насосний і турбінного (стоповий режим), а права – повній відсутності ковзання. У реальних умовах експлуатації ці режими роботи зустрічаються вкрай рідко або відсутні.
і . Ліва границя відповідає 100% взаємному ковзанню коліс насосний і турбінного (стоповий режим), а права – повній відсутності ковзання. У реальних умовах експлуатації ці режими роботи зустрічаються вкрай рідко або відсутні.
В випадку непрозорої гідропередачі обидві залежності при і сполучаються в одну. Це означає, що регулятор двигуна виключається з роботи. Двигун працює в тому самому постійному швидкісному і навантажувальному режимі, позначеному крапкою перетинання регуляторної характеристики і характеристики незалежно від зміни зовнішнього навантаження. Регулювання крутного моменту на вихідному валу МТУ залежно від навантажувального моменту здійснюється тільки зміною кутової швидкості турбінного колеса.
Кожний варіант сполучення характеристик дизеля і гідромеханічної трансмісії має свої достоїнства. При узгодженні по першому варіанті, показаному на рис. 6.7,а максимально використається енергетичний потенціал двигуна, гідротрансформатор не випускає його з режиму зони 1 максимальної потужності незалежно від зовнішнього навантаження. При узгодженні сполучення характеристик по другому варіанті режим роботи двигуна не виходить за межі мінімального рому витрати палива  , хоча при цьому дизель працює увесь час на коректорній ділянці регуляторної характеристики. Чим менше прозорість гідропередачі, тим вуже зона і вище паливна економічність або використання потужності двигуна в експлуатації залежно від ділянки регуляторної характеристики (зона 2 або 1), з яким сполучена характеристика гідротрансформатора.
, хоча при цьому дизель працює увесь час на коректорній ділянці регуляторної характеристики. Чим менше прозорість гідропередачі, тим вуже зона і вище паливна економічність або використання потужності двигуна в експлуатації залежно від ділянки регуляторної характеристики (зона 2 або 1), з яким сполучена характеристика гідротрансформатора.
Сполучення дизеля із прозорим гідротрансформатором (рис. 6.7,б) характерно тим, що може охоплювати великий діапазон роботи двигуна на регуляторній та коректорній ділянках регуляторної характеристики і забезпечувати повну реалізацію коефіцієнта запасу крутного моменту.
Таблиця 6.3. Характеристики МТУ дизель–гідромеханічна трансмісія
| Гідромеханічна трансмісія | Варіанти сполучення | 
| 
|  ,
% ,
%
|  ,
% ,
%
|
| З непрозорою характеристикою | 2,09 | 2,29 | 87,6 | 108,4 | |
| Із прозорою характеристикою | 2,02 | 2,13 | 80,9 | 103,1 | |
| Гідромуфта | 2,33 | 2,98 | 83,3 | 105,8 |
Примітка: за 100% показників і прийняті значення потужності й питомої витрати палива відповідному номінальному режиму роботи дизеля.
Показники роботи МТУ з різними типами гідропередач і різним сполученням характеристик наведені в табл. 6.3. Для оцінки властивостей МТУ прийняті наступні параметри:
діапазони регулювання крутного моменту й кутової швидкості вала турбінного колеса:

середнє значення потужності і питомої витрати палива, наведені до вала турбінного колеса і .
Індекс «т» відповідає режиму роботи МТУ при  , а «тн» – режиму роботи при номінальній частоті обертання вала дизеля; ці режими роботи МТУ є граничними при розрахунку середніх значень потужності та питомої витрати палива. Залежності
, а «тн» – режиму роботи при номінальній частоті обертання вала дизеля; ці режими роботи МТУ є граничними при розрахунку середніх значень потужності та питомої витрати палива. Залежності  ,
,  і
і  від кутової швидкості вала турбіни гідропередачі у відносних значеннях показані на рис. 6.8.
від кутової швидкості вала турбіни гідропередачі у відносних значеннях показані на рис. 6.8.
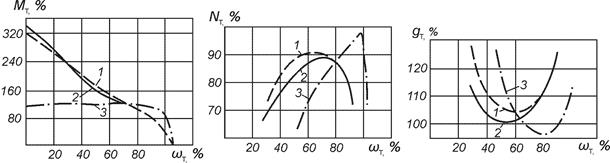
Рис. 6.8 Характеристика МТУ дизель–гідромеханічна трансмісія:
1 – гідротрансформатор з непрозорою характеристикою; 2 – гідротрансформатор з прозорою характеристикою; 3 – гідромуфта
Максимальна енерговіддача двигуна досягається при сполученні робочого режиму гідро трансмісії (починаючи з її ККД > 0,8), що володіє непрозорою характеристикою, із зоною максимальної потужності дизеля, включаючи у великій мері коректурну галузь регуляторної характеристики. Середня потужність у варіанті 1 вище на 5...8 %, варіант 2 відрізняється більше високої (на 2...5 %) паливною економічністю  . При варіанті з спільної роботи дизеля та гідро трансмісії збільшуються діапазони
. При варіанті з спільної роботи дизеля та гідро трансмісії збільшуються діапазони  і
і  безперервного автоматичного регулювання крутного моменту і кутової швидкості в порівнянні з першим і другим варіантом відповідно на 10...15 і 30...40 %.
безперервного автоматичного регулювання крутного моменту і кутової швидкості в порівнянні з першим і другим варіантом відповідно на 10...15 і 30...40 %.
Слід зазначити, що розглянуті варіанти узгодження характеристик дизеля і гідромеханічної трансмісії є одними з можливих. При інших варіантах сполучення характеристик розглянуті параметри будуть приймати проміжні значення в порівнянні з наведеними в табл. 6.3.
У тракторах основним варіантом сполучення характеристик дизеля і гідромеханічної трансмісії прийнятий перший варіант, що забезпечує близьке до 100% використання потужності, двигуна незалежно від зовнішнього навантаження.
Розглянуті показники роботи справедливі для тих тракторів, у яких гідромеханічна трансмісія використається постійно. Іноді з метою підвищення паливної економічності встановлюють механізм, що блокує гідротрансформатор. Так, на сільськогосподарського тракторах гідротрансформатор використають, головним чином, при розгоні і тимчасовому перевантаженні двигуна. При роботі зі сталим навантаженням його блокують. У цьому випадку робота МТУ з гідропередачею не відрізняється від роботи МТУ з механічною східчастою трансмісією.
Гідромуфта
Одним з основних призначень гідротрансформатора, і гідромуфти є демпфірування вібрацій і низькочастотних коливань крутного моменту в трансмісії з метою зниження навантаження на деталі та вузли МТУ, а також поліпшення умов праці тракториста. На відміну від гідромуфт комплексні гідропередачі виконують цю функцію з високою паливною економічністю в більше широкому діапазоні передаточних чисел. Але гідромуфти простіше по конструкції, дешевше та надійніше. Вони не вимагають установки додаткових гідравлічних систем. Тому в обґрунтованих випадках, коли автоматичність перетворення крутного моменту залежно від навантаження не є обов'язковою вимогою до трансмісії, а динамічні процеси в тракторі досить інтенсивні і вимагають зниження застосовують гідромуфту.
Потрібно відзначити експлуатаційні достоїнства тракторів з гідромуфтою. Полегшується керування трактором і підвищується безпека роботи. Цьому сприяє безступінчасте регулювання швидкості трактора і висока надійність роботи дизеля, тому що виключається його зупинка через перевантаження. Практично не потрібне перемикання передач, для керування швидкістю трактора використається в основному важіль керування регулятором двигуна і педаль гальма. Шляхом збільшення та зменшення подачі палива можна збільшити або зменшити швидкість руху трактора, аж до повної його зупинки, а також забезпечити плавне рушання з місця і розгін до заданої швидкості на даній передачі. Полегшується маневрування трактора при під'їзді до знарядь.
Для трактора з гідромуфтою характерний малий діапазон безперервного регулювання тягового зусилля і підвищена експлуатаційна витрата палива. Ці показники залежать від властивостей дизеля та гідромуфти, а також від узгодження їхніх характеристик.
На тракторах установлюють гідромуфти, що працюють при частковому заповненні. На рис. 6.9 показана найбільш типова безрозмірна характеристика гідромуфти. Крім робочих режимів гідромуфта забезпечує обгінні режими, що супроводжують гальмування трактора та пуск двигуна буксируванням, а також режими противовращения робочих коліс при короткочасному гальмуванні трактора.

Рис.6.9. Безрозмірна характеристика гідромуфти
Основна область характеристики гідромуфти відповідає дуже вузькій ділянці малих ковзань, менш 10...15 %. Саме в цьому діапазоні гідромуфта розбудовує максимальний ККД при і = 0,97 і має повну прозорість. Тому регулювання крутного моменту МТУ залежно від зовнішнього навантаження виконує регулятор швидкості двигуна. Враховуючи це. характеристики дизеля та гідромуфти сполучають таким чином, щоб реалізація робочих режимів функціонування дизеля по регуляторній характеристиці здійснювалася при найбільш високому ККД гідромуфти. Таке сполучення характеристики дизеля та гідромуфти наведене на рис.6.7, б діапазон роботи гідромуфти відповідає значенню ККД 0,9...0,98.
З вихідної характеристики дизель–гідромуфта, наведеної на рис 6.6, а видне що робочі характеристики установки та дизеля відрізняються несуттєво по потужності  і крутному моменту
і крутному моменту  , а відмінності по паливній економічності відбивають втрати енергії в гідромуфті і становлять невелику величину, оскільки головна робоча зона характеристики гідромуфти припадає на режим малого ковзання. При цьому в зоні режимів, погоджених сполученням характеристик, забезпечується висока надійність роботи дизеля без зупинки на будь–якій ділянці його характеристики, у тому числі при максимальному моменті. Завдяки цьому створюються передумови більш інтенсивного розгону МТА і подолання тимчасових перевантажень, чим у трактора, оснащеного ступінчастою механічною трансмісією.
, а відмінності по паливній економічності відбивають втрати енергії в гідромуфті і становлять невелику величину, оскільки головна робоча зона характеристики гідромуфти припадає на режим малого ковзання. При цьому в зоні режимів, погоджених сполученням характеристик, забезпечується висока надійність роботи дизеля без зупинки на будь–якій ділянці його характеристики, у тому числі при максимальному моменті. Завдяки цьому створюються передумови більш інтенсивного розгону МТА і подолання тимчасових перевантажень, чим у трактора, оснащеного ступінчастою механічною трансмісією.
Використання потужності двигуна та паливна економічність трактора із трансмісією, оснащеною гідромуфтою, залежать від розподілу швидкісного ряду коробки передач. Практично воно повинне бути таким же як і в трактора з механічною трансмісією, тому що діапазон регулювання крутного моменту на виході МТУ трактора з гідромуфтою визначається тільки регуляторною характеристикою двигуна і коефіцієнтом пристосовності двигуна на відміну від МТУ, у якої момент на турбіннім колесі змінюється автоматично гідротрансформатором.
Тягові властивості гідрооб’ємної трансмісії. Тягова характеристика трактора з такою трансмісією показана на рис. 6.10. Область робочих режимів обмежена прямими постійного значення тягового зусилля  і швидкості
і швидкості  трактора, а також відрізком гіперболи 1–3, що є геометричним місцем точок максимальної тягової потужності
трактора, а також відрізком гіперболи 1–3, що є геометричним місцем точок максимальної тягової потужності  Точка 2 відповідає номінальному тяговому зусиллю трактора і номінальної швидкості
Точка 2 відповідає номінальному тяговому зусиллю трактора і номінальної швидкості  . При роботі двигуна на частковому швидкісному режимі гіпербола
. При роботі двигуна на частковому швидкісному режимі гіпербола  зміщується. Слід мати зважаючи на, що з урахуванням буксування рушіїв трактора ця залежність втрачає строгість гіперболічний залежності. Чим вище буксування, тим більше відхилення залежності
зміщується. Слід мати зважаючи на, що з урахуванням буксування рушіїв трактора ця залежність втрачає строгість гіперболічний залежності. Чим вище буксування, тим більше відхилення залежності  від гіперболічної.
від гіперболічної.

Рис. 6.10. Тягова характеристика трактора з гідрооб’ємною трансмісією
Співвідношення між максимальним і номінальним тяговим зусиллям трактора складає 30...40 % залежно від тягового класу і призначення трактора. Тягова характеристика охоплює весь діапазон технологічних швидкостей трактора і тягових зусиль.
Застосування гідрооб’ємних передач вимагає обов'язкового поєднання їх з різними пристроями автоматичного регулювання, без яких неможливо реалізувати потенційні можливості цих передач і досягти найвищих показників роботи енергетичного засобу. Слід зазначити, що гідрооб'ємний привід є хорошим об'єктом для автоматичного регулювання, тому що з ним дуже добре поєднуються самі різні автоматичні пристрої.
Основний параметр регулювання – передаточне число в трансмісії, яке змінюється автоматично і безступінчастий в відповідності з навантаженням на трактор. При безступінчастому автоматичному регулюванні швидкості руху підвищується використання потужності двигуна, усуваються витрати часу на перемикання передач, забезпечується інтенсивний розгін, внаслідок чого підвищується середня швидкість руху і забезпечуються необхідні технологічні режими. Все це підвищує продуктивність і агротехнічні показники трактори.
Гідрооб'ємна трансмісія не використовується на сільскогосподарських мобільних енергетичних засобах тягового призначення, оскільки для машин цього типу більше значення мають достоїнства механічної трансмісії (високий ККД і здатність працювати з великими перевантаженнями).
Гідрооб'ємну трансмісію застосовують на машинах, до яких пред'являють певні технологічні вимоги і використання гідрооб’ємной трансмісії на яких має очевидні експлуатаційні переваги. З машин с.–х призначення можна виділити збиральні комбайни і енергетичні засоби, призначені для роботи із| збиральними машинами, що відрізняються розгалуженим приводом і що потребують достатньо точного регулювання технологічного процесу.
Для підвищення загального ККД трансмісії гідрооб’ємний привід встановлюють лише на колеса ходової системи, а привід ВВП роблять механічним. В цьому випадку плавне регулювання навантаження на двигун при зміні якості прибраної культури здійснюється безступінчастою зміною швидкості поступальної ходи енергетичного засобу.
6.4. Тенденції розвитку трансмісії
Основним типом трансмісії залишається механічний переважно з постійним зчепленням шестерень.
Зменшенню енерговитрат та підвищенню надійності сприяють такі тенденції розвитку трансмісій тракторів:
збільшення максимальних транспортних швидкостей (до 50 км/год серії «Фендт–Фаворит», «Ксілон», «Унімог–Шене–бек» фірми ТТВГ з трансмісією ZF);
заміна однодискових сухих муфт зчеплення багатодисковими в маслі;
значне збільшення кількості передач (до 44 вперед і 44 назад в трансмісії ZF: 6 рядів з синхроперемиканням по 4 передачі «Пауа шифт» фрикційного типу та 20 передач з «повзучими» швидкостями, рис.6.11);

Рис. 6.11. Схеми трансмісій тракторів:
а – механічна: 1 – головна муфта зчеплення, 2 – ведучий міст, 3 – гальма;
б – гідромеханічна «Фендт–Варіо»: 1 – демпфер,
2 – планетарна передача, 3 – епіцикл, 4 – сонячне коло,
5 – водило, 6 – гідронасос, 7 – гідромотор, 8 – вал суматора,
9 – перемикання рядів
електрогідравлічне перемикання передач одним важелем, який розміщується на підлокітнику сидіння;
використання реверсивних безступінчастих гідромеханічних передач з прийнятним ККД трансмісії, в яких 25–75 % потужності усередині діапазону між ступенями передається гідравлічними машинами (див. рис. 6.11, б).
Гідромеханічні передачі, які використовують як механізми повороту гусеничних тракторів серії «Челенджер» і ХТЗ–200, відкривають широкі можливості для уніфікації трансмісій колісних та гусеничних тракторів за схемою моделей СН–35/55, «Джон Дір» серії 8000Т або за схемою з трикутним обводом ЛКЗ (Росія), ХТЗ, ПМЗ (Україна), «Кейз–ІХ» (США, рис. 6.12).
Трансмісії гусеничних тракторів типа ХТЗ–180 і ХТЗ–200 відносяться до двохпоточних механізмів передачі і повороту (МПП), що забезпечують ступінчасту зміну швидкості трактора при прямолінійному русі і безступінчасте, – при повороті. Двухпоточність даного МПП забезпечуєте (рис.6.12) шляхом передачі основного потоку потужності від двигуна внутрішнього згорання 1 через механічну коробку передач 3 до бортових передач 8, 10 правого і лівого бортів, а додатковий потік – через гідрооб’ємний механізм повороту (ГОП), що містить регульований гідронасос 15 і нерегульований гідромотор 14. Трактор повертається при зміні водієм робочого об'єму гідронасоса.

Рис.6.12 Кінематична схема гусеничного трактора з гідрооб’ємним механізмом повороту:
1 – двигун внутрішнього згорання; 2 – редуктор ГОП; 3 – коробка передач; 4,13 – шестерні роздавальної коробки; 5, 12 – карданні передачі; 6, 10 – сонячні шестерні; 7, 11 – провідні колеса; 8, 9 – шестерні головної передачі; 14 – об'ємний гідромотор; 15 – об'ємний гідронасос
6.5. Параметри і характеристики ходової системи
Ходова система (рушій) є основною системою, яка визначає показники трактора, тому що саме у взаємодії рушіїв із ґрунтом або дорогою реалізуються функціональні можливості трактора як тягача і мобільного енергетичного засобу. Від параметрів ходової системи залежать практично всі основні показники функціонального призначення енергетичного засобу: тяглово-зчіпні і тяглово-динамічні, агротехнічні, а також навантажувальна здатність, керованість, маневреність і плавність ходу. Однак основними з перерахованих слід визнати тяглово-зчіпні.
Тяглово-зчіпні властивості характеризують ступінь досконалості трактора і оцінюються часткою ваги машини, яка звертається в силу тяги. Чим більша частина ваги може бути реалізована в силі тяги трактора, тем повніше використовується енергія двигуна в технологічному процесі, здійснюваному МТА.
Технологічні особливості використання сільськогосподарського тракторів пов'язані з більшою різноманітністю ґрунтів, фонів, доріг, по яких їм необхідно переміщатися з високим тяговим навантаженням. Комбінація цих умов може бути самою різною. Залежно від призначення на тракторі застосовують той або інший тип ходової системи. На мобільних енергетичних засобах сільськогосподарського призначення в нашій країні застосовують колісні та гусеничні ходові системи: колісні – з однаковими або різними розмірами передніх і задніх коліс; гусеничні – з еластичною та жорсткою підвіскою.
Основні технологічні вимоги к рушіям, регламентовані різними документами, що випливають: ширина колії, тип підвіски, тиск на ґрунт, радіус повороту, агротехнічний просвіт.
6.6. Тенденції розвитку ходової системи
Основнім типом рушія залишається колісний. Втім підвищення потужності колісних тракторів збільшує їх масу і гостро ставить проблему ущільнення і збереження родючості ґрунтів. Вона вирішується перш за все шляхом використання удосконалених рушив, які пройшли еволюційний шлях від сталевих коліс та гусениць до еластичних комбінованих систем (рис. 6.13).

Рис. 6.13. Класифікаційна схема поколінь ходових систем тракторів
У наступні роки всі провідні тракторобудівні фірми, особливо європейські, будуть широко використовувати колісні ходи четвертого покоління із шинами регульованого і наднизького тиску (40–50 кПа) і установлюватимуть їх на своїх тракторах. Так, фірма «Джей–Сі–Бі Лендпауа», яка вийшла на ринок з новим трактором «Фасттрак», з чотирьох найменувань шин для нього постачає три моделі широко профільних шин. В Україні аналогічні шини 66 ´ 43.00 RL25 для тракторів Т–150К, ХТЗ–120/121 розроблено НДІ великогабаритних шин. Тенденція здвоювання та створювання коліс стандартними радіального типу шинами поширилася і на колеса з широко профільними шинами. Це дає змогу значно зменшити ущільнення ґрунтів. Якщо до 80–х років переважно використовували трактори з усіма ведучими колесами (їх частка в парку колісних машин стабілізувалася на рівні 65–70 %), то в 90–х роках інтенсивного поширення набувають нові еластичні гусеничні рушії третього покоління.
Контрольні запитання:
1. Проаналізуйте параметри двигунів внутрішнього згоряння.
2. Основні тенденції розвитку двигунів внутрішнього згоряння
3. Аналіз характеристики сучасних тракторних двигунів.
4. Проаналізуйте динаміку зміни робочих швидкостей МТА.
5. Дати аналіз роботи енергонасичених тракторів на оранці.
6. Проаналізуйте експлуатаційні показники агрегатів на сівбі зернових.
7. Проаналізуйте параметри і характеристики трансмісії різних типів.
8. Переваги і недоліки безступінчатої трансмісії.
9. Проаналізуйте конструктивні схеми і безрозмірні характеристики різних типів гідромеханічних передач.
10. Аналіз регуляторної характеристики дизеля в сполученні з гідромуфтою або гідротрансформатором.
11. Проаналізуйте характеристику спільної роботи дизеля з гідротрансформатором.
12. Проаналізувати характеристику моторно-трансмісійної установки дизель-гідромеханічна трансмісія.
13. Аналіз безрозмірної характеристики гідромуфти.
14. Проаналізувати тягову характеристику трактора з гідрооб’ємною трансмісією.
15. Проаналізуйте тенденції розвитку схем трансмісій тракторів.
16. Поясніть принцип дії гідрооб’ємного механізма поворота гусеничного трактора.
17. Проаналізуйте параметри і характеристики ходової системи трактора.
18. Аналіз класифікаційної схеми поколінь ходових систем тракторів.
20. Тенденції розвитку ходових систем тракторів.
ЛЕКЦІЯ 7. АВТОМАТИЗАЦІЯ МЕЗ
7.1. Призначення автоматизації МЕЗ
7.2. Автоматичне управління напрямом руху трактора
7.3. Тенденції розвитку автоматизації МЕЗ
Мета: прослухав лекцію студент повинен;
знати: сучасні системи та тенденції розвитку автоматизації МЕЗ;
уміти:запроваджувати системи автоматизації для підвищення ефективності використання у сільськогосподарському виробництві.
7.1. Призначення автоматизації МЕЗ
Автоматизація мобільних енергетичних засобів сільськогосподарського призначення дозволяє:
здійснювати технологічний процес в строгій відповідності з агротехнічними вимогами незалежно від рівня кваліфікації і стану обслуговуючого процес персоналу;
максимально використовувати потенційні можливості машин і їх поєднання (комплекси) по продуктивності;
знизити питому витрату палива (на одиницю виконаної роботи) завдяки можливості автоматичного вибору відповідного режиму роботи;
полегшити працю обслуговуючого персоналу, звівши до мінімуму його участь в процесі управління мобільним енергетичним засобом або процесом;
підвищити термін служби мобільного енергетичного засобу за рахунок оптимізації його швидкісних і навантажень режимів роботи.
Найбільш помітний ефект автоматизація дає в наступних випадках: коли її запроваджують в внаслідок цілеспрямованого створення нового технологічного процесу; коли сам процес, а також машини, засоби автоматики, телемеханіки, обчислювальної техніки створюються як єдиний технологічний комплекс; коли окрема машина розробляється з урахуванням рівня її автоматизації як об'єкт, що задовольняє вимогам автоматизації, з одночасним створенням її систем і вузлів з вбудованими в них елементами автоматики.
Перші трактори створювалися без врахування їх подальшій автоматизації. Згодом, із застосуванням дизелів замість карбюраторних двигунів їх сталі оснащувати автоматичними відцентровими регуляторами швидкості. Автоматизація глибини ходу робочих органів сільськогосподарського машини і довантаження провідних коліс почала здійснюватися після впровадження гідравлічних навісних систем. З'явилися автоматичні системи контролю технічного стану окремих систем трактора. Критичним місцем з погляду автоматизації трактора є ступінчаста механічна трансмісія.
Автоматизація сучасних мобільних енергетичних засобів є набором локальних систем регулювання і автоматичного управління окремими процесами роботи мобільного енергетичного засобу або МТА.
В даний час можна виділити наступні системи автоматизації трактора:
контролю технічного стану і автоматичного захисту окремих агрегатів і систем;
управління режимами роботи двигуна (швидкісним, навантажувальним, тепловим);
регулювання довантаження ведучих коліс;
автоматичного включення другого ведучого моста;
управління коробкою передач;
управління напрямом руху трактора.
Деякі з перерахованих систем застосовують в комплексі, внаслідок чого підвищується ефективність їх використання: контроль окремих параметрів технічного стану агрегату об'єднують з автоматичним його захистом, включення другого провідного моста – з автоматичною системою довантаження провідних коліс, а автоматичне перемикання передач – з управлінням навантаженням і швидкісним режимами двигуна.
7.2. Автоматичне управління напрямом руху трактора
Дослідженнями встановлено [4], що на оранці, культивації і посіві зернових приблизно 90 % кількості інформації, що переробляється трактористом, складає інформація про напрям руху МТА.
Зі всього різноманіття пристроїв для автоматичного водіння трактора різного конструктивного виконання і різного функціонального призначення розглянемо тільки системи автоматичного направлення рухом (САНР) як засоби, що підвищують агротехнічні властивості трактора при виконанні різних технологічних операцій: оранки, посіву, міжрядної обробки, внесення добриві, збирання врожаю.
По необхідній точності напряму руху МТА технологічні процеси можна розділити на три групи:
1) без регламентації точності (зволакуваня соломи і скиртування, вивезення добрив і урожаю від комбайнів та ін.);
2) з невисокою точністю (суцільна культивація і боронування, внесення добрив, полив, снігозатримання та ін.);
3) з високою точністю (оранка, посів, міжрядна обробка та ін.).
Для оцінки автоматизації управління напрямом руху приймемо як агротехнічні показники наступні параметри:
кількість огріхів і звалювань енергетичного засобу в борозну при посіві і оранці;
чистоту зрізу бур'яну при міжрядній обробці;
частоту зрізу культурних рослин при міжрядній обробці.
Досліди на посіві буряка показали (рис.3.29), що при автоматичному управлінні посівним агрегатом приблизно 50 % (Р) коріння розташовується по осі рядку, а 10,5 % – з відхиленням у до 2 см в ту або іншу сторону. При посіві з ручним управлінням трактора по осі рядку розташовувалося тільки 19 % коріння і з відхиленням 2 см – 13 %.
Відмічений в процесі випробувань прямолінійний рух посівного агрегату при автоматичному управлінні. Точність орієнтації агрегату із застосуванням САНР вища, ніж при ручному управлінні. САНР забезпечує стабільність характеристик незалежно від часу доби, освітленості, фізичного стану тракториста. Порівняльні досліди на міжрядній обробці показали, що захисна смуга при автоматичному управлінні може бути зменшена, завдяки чому досягнена скорочення бур'янів на 12 % на 1 м2. Автоматичне управління дозволило проводити МРО на більш вищій швидкості і підвищити за рахунок цього продуктивність на 18 %.

Рис. 7.1. Відхилення коріння цукрового буряку від осі рядку при посіві при управлінні:
1 – автоматичному; 2 – ручному
Для оцінки якості роботи просапного агрегату в процесі випробувань визначалася ушкоджуваємість культурних рослин (таблиця. 7.1). Застосування автоматичної системи водіння агрегату дозволяє суттєво підвищити агротехнічну якість МРО при більш вищій продуктивності агрегату.
Таблиця 7.1. Ушкодження культурних рослин при міжрядній обробці
| Швидкість руху, м/с (км/год) | Без САНР | З САНР |
| 1,46 (5,26) 2,16 (7,78) 3,02 (10,9) | 0,85 3,16 14,8 | 0,50 1,44 2,96 |
Розглянемо структурну схему системи автоматичного водіння МТА із застосуванням САНР (рис.7.2). Щуп автоматичного пристрою (датчик Y) знаходиться в нейтральному положенні при русі енергетичного засобу по заданій траєкторії. Коли енергетичний засіб відхиляється від борозни, від рядка культурної рослини, від бровки нескошених зернових і так далі(координата траєкторії Y), щуп відхиляється від нейтрального положення і формує електричний сигнал  на пристрій уу, що управляє, який виробляє команду
на пристрій уу, що управляє, який виробляє команду  механізму повороту МП. Величина і тривалість повороту регламентуються зворотним зв'язком по сигналу
механізму повороту МП. Величина і тривалість повороту регламентуються зворотним зв'язком по сигналу  . Коли відновлюється нейтральне положення щупа, сигнал відсутній.
. Коли відновлюється нейтральне положення щупа, сигнал відсутній.

Рис. 7.2. Структурна схема автоматичного управління напрямом руху трактора
Конструктивно цей пристрій є найчастіше гідроциліндром з гідророзподільник, де – це команда на переміщення гідророзподільника, а – це дія гідроциліндра на механізм повороту.
7.3. Тенденції розвитку автоматизації МЕЗ
Автоматизація тракторів розпочалась з введення контролю роботи і попереджувальної сигналізації про відхилення від норми в функціонуванні двигуна, трансмісії, гальм, електричної, гідравлічної та інших систем і пристроїв трактора. Кількість точок такого контролю на сучасних тракторах досягає кількох десятків, що забезпечує їх високу безвідмовність.
В пультах управління використовують лицьові панелі з од-нофункціональним призначенням покажчиків, біля яких на панелі зображено умовні позначення їх функцій та назви відповідних параметрів. В більш дорогих моделях тракторів використовують матричні індикатори для надання цифрово-буквенної інформації та універсальні дисплеї, на яких за викликом тракториста можна побачити дані бігучих режимів чи обліку роботи МТА, одержати інформацію про технічний стан окремих вузлів трактора, побачити положення чи дію робочих органів (за допомогою відеокамери) і навіть переглянути передачі телебачення.
Зараз практично на всіх тракторах застосовують системи дистанційного управління та автоматичного регулювання положення важелів начіпних механізмів тракторів. Виконується позиційне, силове і змішане регулювання положення важелів для стабілізації встановленої з кабіни глибини занурення робочих органів у ґрунт, довантаження задніх ведучих коліс трактора вагою і вертикальними зусиллями робочих машин та зменшення коливань тягових зусиль трактора. До ускладнених систем додатково вводять автоматичне дозоване зменшення глибини обробки ґрунту з метою усунення надмірного буксування ведучих коліс. Для виміру буксування застосовують радарний датчик. Все це покращує техніко-економічні показники трактора і полегшує управління ним.
Зроблено перші крокі у створенні систем автоматичного водіння МТА і комбайнів. Практичне використання поки що знайшли лише системи автоматичного водіння машин вздовж рядків рослин на збиранні кукурудзи, цукрового буряку тощо. Перспективними слід вважати системи автоматичного водіння мобільної сільськогосподарської техніки за сигналами з космічних супутників. Особливого значення ці системи набувають у координатному землеробстві для змінного локального внесення добрив чи коригування розпилення отрутохімікатів відповідно до конкретних потреб різних ділянок поля. Зокрема, за допомогою системи «Fieldstar» («Зірка полів») фірми «Массей-Фергюсон» у 1996 р. здійснено повністю автоматичне внесення змінних (від 231 до 423 кг/га) норм добрив згідно з попередньо визначеною програмою руху трактори і регулювання підживлювача в кожному конкретному місці поля. Ця програма враховує картограму урожаю (озима пшениця від 4 до 8 т/га, комбайн МФ–30/40), картограму внесення добрив і картограму віддачі з поля (ціна зерна 130 фт.ст./т, середній урожай 7,25 т/га, середній прибуток 398 фт.ст./га).
Останнім часом набуло поширення електронне регулювання впорскування пального, що забезпечує 6–12 % економії пального при роботі двигуна на коректорній характеристиці зі значним (35–40%|) запасом крутного моменту (рис.7.3). Це забезпечило підвищення завантаження надпотужних (260–425 к.с.) тракторів фірми «Джон-Дір» Зокрема час роботи трактори 9300 (потужністю 360 к.с.), який мав електронне регулювання впорскування пального, при завантаженні двигуна понад 50 % збільшився на 26 % порівняно з трактором 8870 (потужністю 350 к.с.), який мав звичайне регулювання впорскування пального.

Рис. 7.3. Характеристики двигуна з механічним (1) та електронним (2) регулюванням впорскування пального
Сучасні досягнення в галузі мікроелектроніки, гідроприводу та автоматики дозволяють автоматизувати керування будь-яких функцій людини з контролю роботи і управління мобільними сільськогосподарськими машинами для досягнення потенційно можливої продуктивності, мінімальної витрати пального, високої якості виконання робіт та безвідмовності техніки. Вже створено і почали використовувати універсальні бортові комп'ютери з комплектами датчиків і виконавчих механізмів, які збирають та аналізують інформацію щодо технічного стану машин, оптимізують їх режими функціонування при виконанні всіх основних технологічних процесів, ведуть облік виконаних робіт і наводять всю необхідну інформацію на пульт управління трактора або в стаціонарну персональну ЕОМ. Такі системи автоматизації дозволяють радикально покращити всі основні показники існуючих МТА та застосувати оптимальні технологічні схеми і високопродуктивні бездоганно працюючі робочі органи машин. Будуть використані нові раціональні компонування машин з реверсивними пультами управління в герметичних пересувних кабінах. На черзі створення і застосування «інтелектуальних» систем автоматизації, які наблизять появу сільськогосподарських роботів-машин XXI століття. Завдяки цьому автоматизація стає одним із основних важелів науково-технічного прогресу в сільськогосподарському машинобудуванні.
Контрольні запитання:
1. Обґрунтуйте значення автоматизації МЕЗ.
2. Аналіз систем автоматизації тракторів.
3. Аналіз систем автоматизації автомобілів.
4. Які показники покращуються при автоматизації напряму руху трактора.
5. Поясніть структурною схему автоматичного управління напрямком руху трактора.
6. Проаналізуйте характеристику двигуна з механічним та електронним регулюванням впорскування пального.
7. Тенденції розвитку автоматизації МЕЗ.
КОНТРОЛЬНІ ЗАПИТАННЯ
1. Місце колісних та гусеничних машин в сучасному сільськогосподарському виробництві.
2. Що таке мобільні енергетичні засоби (МЕЗ)?
3. Поняття про технологічні властивості мобільних енергетичних засобів.
4. Взаємозв'язок основних технологічних показників, технічних характеристик і конструктивних параметрів мобільних енергетичних засобів.
5. Основні етапи удосконалення технологічних засобів трактора.
6. Основні етапи удосконалення автомобілів.
7. За якою ознакою класифікують трактори вітчизняного виробництва.
8. За якою ознакою класифікують трактори закордонного виробництва.
9. Яка класифікація більш точно визначає параметри і комплекс машин.
10. Компонувальні схеми мобільних енергетичних засобів.
11. Що таке технологічний простір?
12. Переваги і недоліки тракторного самохідного шасі.
13. Переваги і недоліки модульних енерготехнологічних засобів і МТА на їх основі.
14. Особливість компонування тракторів з колісною формулою 4К4 б.
15. Класифікація мобільних енергетичних засобів по компонувальним схемам.
16. Які ознаки має сучасний трактор класичного компонування.
17.Проаналізуйте основні властивості грунту.
18. Які процеси відбуваються в грунті в результаті дії рушіїв МЕЗ.
20. Аналіз агротехнічних вимог МЕЗ.
21. Способи і шляхи зниження шкідливого впливу МТА на грунт.
22. Показник універсальності енергетичного засобу.
23. Показник технологічного рівня енергетичного засобу.
24.Оцінка технологічної універсальності.
25. Показник ефективності використання МЕЗ в складі комбінованого агрегату.
26. Показник ефективності використання на ґрунтообробних операціях.
27. Показник ефективності використання на міжрядній обробці.
28. Показник ефективності використання на збиральних роботах.
29. Показник ефективності використання на транспортних роботах.
30. Кількісна і бальна оцінка технологічної універсальності МЕЗ.
31. Як визначається потенційна продуктивність енергетичного засобу.
32. Проаналізуйте показники продуктивності.
33. Проаналізуйте коефіцієнт використання часу зміни.
34. Аналіз показників агротехнічних властивостей
35. Вплив агротехнічного просвіта і захисної зони на агротехнічні показники МЕЗ.
36. Показники огляду з робочого місця водія і керування. їх аналіз.
37. Вплив колії МЕЗ на його агротехнічні і енерготехнічні показники.
38.Показники керованості енергетичного засобу.
39. Показники вартості виконання технологічного процесу та аналіз їх складових.
40. Аналіз структури експлуатаційних витрат (прямих і наданих).
41. Проаналізувати загальну тенденцію розвитку мобільної енергетики.
42. Аналіз кваліфікаційної схеми поколінь МЕЗ.
43. Особливість стрімкого розвитку тракторів.
44. Аналіз характеристики надпотужних сільськогосподарських тракторів.
45. Аналіз характеристики тракторів класичного типу.
46. Проаналізуйте параметри двигунів внутрішнього згоряння.
47. Основні тенденції розвитку двигунів внутрішнього згоряння
48. Аналіз характеристики сучасних тракторних двигунів.
49. Проаналізуйте динаміку зміни робочих швидкостей МТА.
50. Дати аналіз роботи енергонасичених тракторів на оранці.
51. Проаналізуйте експлуатаційні показники агрегатів на сівбі зернових.
52. Проаналізуйте параметри і характеристики трансмісії різних типів.
53. Переваги і недоліки безступінчатої трансмісії.
54. Проаналізуйте конструктивні схеми і безрозмірні характеристики різних типів гідромеханічних передач.
55. Аналіз регуляторної характеристики дизеля в сполученні з гідромуфтою або гідротрансформатором.
56. Проаналізуйте характеристику спільної роботи дизеля з гідротрансформатором.
57. Проаналізувати характеристику моторно-трансмісійної установки дизель-гідромеханічна трансмісія.
58. Аналіз безрозмірної характеристики гідромуфти.
59. Проаналізувати тягову характеристику трактора з гідрооб’ємною трансмісією.
60. Проаналізуйте тенденції розвитку схем трансмісій тракторів.
61. Поясніть принцип дії гідрооб’ємного механізма поворота гусеничного трактора.
62. Проаналізуйте параметри і характеристики ходової системи трактора.
63. Аналіз класифікаційної схеми поколінь ходових систем тракторів.
64. Тенденції розвитку ходових систем тракторів.
65. Обґрунтуйте значення автоматизації МЕЗ.
66. Аналіз систем автоматизації тракторів.
67. Аналіз систем автоматизації автомобілів.
68. Які показники покращуються при автоматизації напряму руху трактора.
69. Поясніть структурную схему автоматичного управління напрямком руху трактора.
70. Проаналізуйте характеристику двигуна з механічним та електронним регулюванням впорскування пального.
71. Тенденції розвитку автоматизації МЕЗ.
Не нашли, что искали? Воспользуйтесь поиском: