ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Практическое занятие 4. Остановка робота у стены
Алгоритм езды робота: Если расстояние впереди больше 20 см – ехать вперед. Иначе - остановиться
1. Откройте программу езды по линии на одном датчике, написанную ранее
2. Проведите следующие изменения в коде, чтобы робот работал с датчиком расстояния, а не линии (участки кода для замены взяты из примера Ultrasonic2serial):
| Исходный код | Заменить на код |
| int line_pin = 11; int line_state = 0; | #include "Ultrasonic.h" Ultrasonic ultrasonic(12, 13); |
| pinMode(line_pin, INPUT); | Убрать вообще |
| line_state = digitalRead(line_pin); | float dist_cm = ultrasonic.Ranging(CM); |
| if (line_state == LOW) { analogWrite(In1, speed_right); analogWrite (In3, 0); } | if (dist_cm > 20) { // команды моторам для езды вперед } |
| else { analogWrite (In1, 0); analogWrite(In3, speed_right); } | else { // команды моторам для остановки } |
3. 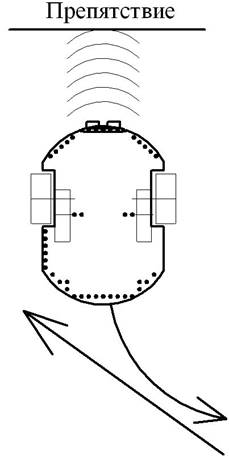 Загрузите программу в робота и проведите испытания. Если программа реализована правильно – робот должен останавливаться, не доезжая до стены или другого препятствия перед датчиком расстояния (например, робот должен следовать за ладонью, движущейся перед ним). При необходимости проведите доработку программы
Загрузите программу в робота и проведите испытания. Если программа реализована правильно – робот должен останавливаться, не доезжая до стены или другого препятствия перед датчиком расстояния (например, робот должен следовать за ладонью, движущейся перед ним). При необходимости проведите доработку программы
Не нашли, что искали? Воспользуйтесь поиском: