ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Моделирование при программном управлении
Рассмотрим функционирование объекта при одном из типовых входных воздействий. Тяговые двигатели имеют большое значение пускового момента, и при подаче скачка напряжения на их обмотки происходит резкое увеличение тока, многократно превышающего допустимое значение, в связи с этим на практике применяют различные системы запуска, ограничивающие ток и постепенно увеличивающие скорость вращения вала. Таким образом, вместо единичного скачка 1(t) в качестве управляющих напряжений u1(t) и u2(t) будем использовать сигналы, линейно нарастающие до заданного уровня.
Рассмотрим режим работы, когда от нулевого момента времени (t0 = 0) до t1 (3 мин) происходит разгон, затем от t1 до момента t2 (18 мин) поддерживается постоянная скорость, и на отрезке времени от t2 до t3 (20 мин) происходит плавное торможение. Управляющие воздействия на первом отрезке [ t0; t1 ] зададим линейно нарастающими от нуля до значений u1 (1500 В) и u2 (100 В), на втором отрезке [ t1; t2 ] − постоянными (u1 = 1500 В и u2 = 100 В) и на третьем [ t2; t3 ] − линейно убывающими до нуля. Каждое из управляющих воздействий зададим в пакете Simulink с помощью блока Signal Builder, расположенного в библиотеке элементов Sources.
Временные диаграммы изменения управляющих воздействий u1(t) и u2(t) и скорости Ω(t) показаны на рисунках 8 – 10. Временные диаграммы токов iд(t) и iг(t) представлены на рисунке 11.
| u1, В |

Рисунок 8 – Временная диаграмма управляющего воздействия u1(t)
| u2, В |
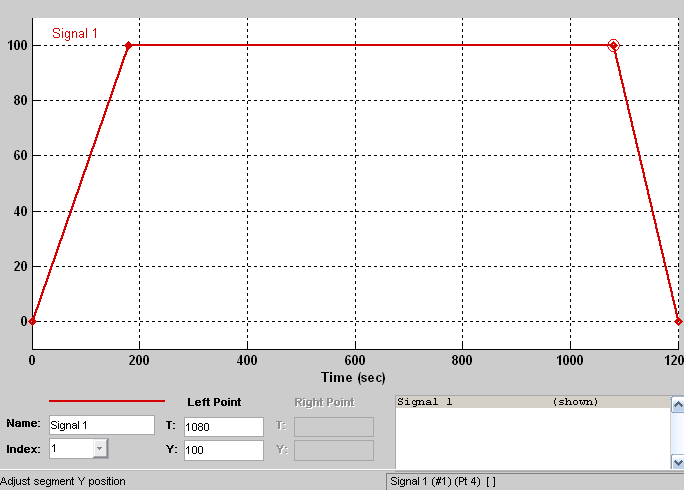
Рисунок 9 – Временная диаграмма управляющего воздействия u2(t)
Текст программы m-файла, в котором вычисляются параметры объекта управления:
Un=1500; %V
Pn=586*10^3; %W
Wn=600*2*pi/60; %rad/sec
KPD=0.94;
Ry=0.056; %Om
Rv=0.048; %Om
p=6;
In=Pn/Un/KPD
Imax=1.2*In
cE=(Un-In*(Ry+Rv))/In/Wn
cM=Pn/(Wn*In^2)
L=2*Un/(5*p*Wn*In)
J=(6*L*Pn^2)/(Ry^2*Wn^2*In^2)
Mn=Pn/Wn
beta=0.004*Mn
%Mc=beta*W
R1=2*Rv+Ry
R2=Ry
T1=3*L/(2*Rv+Ry)
T2=L/Ry
Mn=Pn/omegan;
beta=0.004*Mn;
alfa=2;
В результате получены следующие параметры объекта управления:
– номинальный ток двигателя  ;
;
– ток насыщения  ;
;
– индуктивность обмотки якоря  ;
;
– момент инерции  ;
;
– вращающий момент  ;
;
– коэффициент  ;
;
– коэффициент  ;
;
– коэффициент  .
.
– коэффициент  .
.
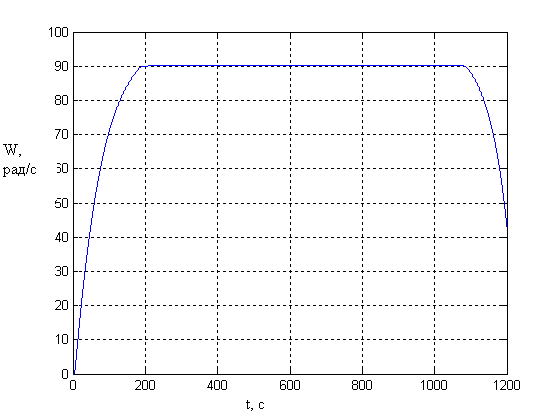
Рисунок 10 – Временная диаграмма изменения скорости Ω(t)
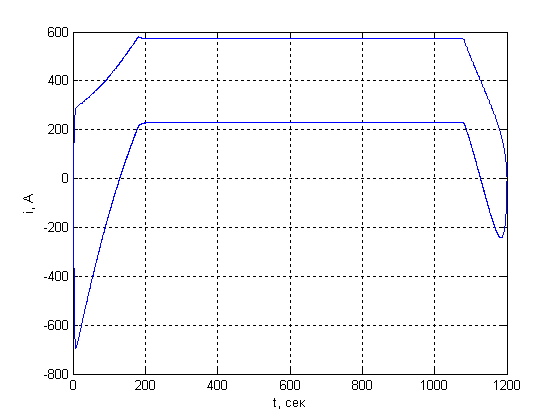
Рисунок 11 – Временная диаграмма изменения токов iд(t) и iг(t)
При управлении реальным объектом могут возникать отклонения реальных значений параметров объекта от параметров его модели, более того, модель всегда является приближенным описанием реального объекта, поэтому при программном управлении невозможно получить точное желаемое значение выходной координаты. Таким образом, необходимо применять принцип управления по отклонению, когда задается желаемое изменение скорости вращения g(t) и определяются управляющие воздействия u1(t) и u2(t) так, чтобы в каждый момент времени минимизировать ошибку

| (37) |
Общий вид структурной схемы системы, в которой реализован комбинированный принцип программного управления и регулирования по ошибке, показан на рисунке 12.
Рисунок 12 – Общий вид структурной схемы системы с комбинированным управлением
Не нашли, что искали? Воспользуйтесь поиском: