ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Режимы работы, статические характеристики асинхронного электропривода с фазным ротором
Для электропривода с асинхронным двигателем (АД) при работе в двигательном и тормозных режимах приближенно характеристики могут быть рассчитаны, если известны основные технические данные двигателя и параметры его обмоток.
Расчеты выполняют, как правило, на основе Г-образной схемы замещения асинхронного двигателя.
Механические характеристики АД в режимах двигательном, торможения противовключением и рекуперативного (генераторного) торможения можно рассчитать по формуле Клосса:

где U 1 – напряжение фазы статора;
R 1 – активное сопротивление фазы статора;
Х к = Х 1 + Х' 2 – индуктивное сопротивление КЗ фазы двигателя
(Х 1, Х 2` – индуктивные сопротивления фазы статора и приведенное фазы ротора);
w0 – угловая синхронная скорость вращения;
знак «+» – двигательный режим и торможение противовключением;
знак «–» – рекуперативное торможение;
а = R 1/ R' 2 – коэффициент (R' 2 – приведенное активное сопротивление фазы ротора);
 – критическое скольжение;
– критическое скольжение;
 – скольжение двигателя,
– скольжение двигателя,
где w(n) – текущие скорости (частоты) вращения ротора двигателя.
| +¥ -¥ |
| -¥ +¥ |
| S w |
| M |
| - M |
| 1 0 |
| S КД |
| 0 w0 |
| S КГ |
| М П= М КЗ |
| М КД |
| - М КГ |
| - М КТ |
| I |
| II |
| III |
| IV |
| wКТ |
Рис. 4.4. Механические характеристики режимов работы АД
При скольжении:
s =1¸0 – двигательный режим (I квадрант);
s ³1 – режим торможения противовключением (IV квадрант);
s £0 – режим рекуперативного (генераторного) торможения (II квадрант);
s £1 – режим динамического торможения (II квадрант).
Характерные точки механической характеристики в режимах двигательном, рекуперативном и противовключении следующие:
s =0, w=w0, M =0 – точка идеального холостого хода (синхронная скорость вращения);
s =1, w=0, M = M КЗ= M П – точка короткого замыкания;
s = s КД, M = M КД, s = s КГ, M = M КГ – точки экстремума;
s ®±¥, w®  ¥, М ®0 – асимптота механической характеристики, которой является ось скорости.
¥, М ®0 – асимптота механической характеристики, которой является ось скорости.
Механическую характеристику АД при динамическом торможении можно рассчитать по следующим формулам:
 ,
,
где  – критическая скорость (критическое скольжение) при динамическом торможении;
– критическая скорость (критическое скольжение) при динамическом торможении;
 – относительная скорость (скольжение) при торможении;
– относительная скорость (скольжение) при торможении;
 – максимальный (критический) момент при динамическом торможении;
– максимальный (критический) момент при динамическом торможении;
К сх – коэффициент, зависящий от способа соединения обмотки статора (К сх=0,816, если обмотка статора соединена Y, и К сх=0,472, если обмотка статора соединена D);
I п – величина постоянного тока;
 – индуктивное сопротивление намагничивающего контура в начальной части кривой намагничивания АД;
– индуктивное сопротивление намагничивающего контура в начальной части кривой намагничивания АД;
I 0 – ток намагничивающей цепи АД;
 – критическая скорость при динамическом торможении.
– критическая скорость при динамическом торможении.
Выражения для расчета электромеханических характеристик АД (s=f(I 1 ), s=f(I 2 `)) выглядят следующим образом.
Ток фазы статора:
 ,
,
где  – коэффициент;
– коэффициент;
 – приведенный ток фазы ротора.
– приведенный ток фазы ротора.
Электромеханическая характеристика АД изображена на рис. 4.5.
Характерные точки электромеханической характеристики:
s =0, w=w0, I2` =0 – точка идеального холостого хода (синхронная скорость вращения);
s =1, w=0, I2` = I кз – точка короткого замыкания;
s 1=- R 2 `/R 1, w1=w0(1+ s 1), I2 `= I макс= U/X K – точка максимального значения тока ротора, лежащая в области отрицательных скольжений; s ®±¥, w® ¥, I 2`® I макс=  – асимптотическое значение тока ротора при бесконечно большом увеличении скольжения и скорости.
– асимптотическое значение тока ротора при бесконечно большом увеличении скольжения и скорости.
| +¥ -¥ |
| -¥ +¥ |
| s w |
| I 2` |
| 1 0 |
| 0 w0 |
| s 1 w1 |
| I 2` |
| I кз= I П |
| I¥ |
| I МАКС |
Рис. 4.5. Электромеханические характеристики для различных
режимов работы АД
Скорость вращения в электроприводе с асинхронным двигателем регулируется изменением частоты f и величины U питающего напряжения, числа пар полюсов 2р, активного сопротивления статора R 1, активного сопротивления ротора R 2`, индуктивного сопротивления статора X 1 и ротора X 2`.
На рис. 4.6 показаны механические естественная и искусственные характеристики при вышеуказанных способах регулирования.
АД с короткозамкнутым ротором наиболее просты по конструкции и надежны в эксплуатации, имеют высокие технические показатели; так, например, у асинхронных двигателей общепромышленного применения перегрузочная способность  . Главные недостатки АД с КЗ ротором – излишняя чувствительность к напряжению питания (М º U 12) и трудность регулирования скорости вращения.
. Главные недостатки АД с КЗ ротором – излишняя чувствительность к напряжению питания (М º U 12) и трудность регулирования скорости вращения.
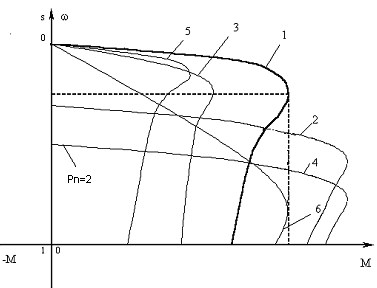
Рис. 4.6. Естественная и искусственные механические характеристики АД:
1 – естественная(U = U Н, f = f Н, r 1, r' 2, x 1, x' 2, 2 P П = 2); 2 – искусственная(f < f Н);
3 – искусственная(U < U Н); 4 – искусственная(2 P П = 4);
5 – искусственная(R 1> r 1, X К > x 1, X К> x' 2); 6 – искусственная(R' 2 >r '2)
Не нашли, что искали? Воспользуйтесь поиском: