ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Способи керування виконавчими двигунами постійного струму
Напруга керування Uк може подаватися (рис. 13.5.) або на якір (якірне керування), або на обмотку збудження (полюсне керування). При цьому обмотка, до якої підводиться напруга збудження Uзб, увімкнена до джерела з незмінною напругою. При магнітоелектричному збудженні можливе лише якірне керування. Обмотку, на яку подається Uк, називають обмоткою керування, а ту, на яку подається Uзб – обмоткою збудження. Виконавчі двигуни постійного струму звичайно виготовляють з ненасиченим магнітним ланцюгом.
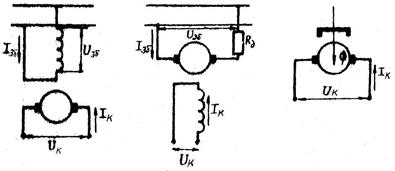
а) б) в)
Рис. 13.5. Схеми вмикання при різних способах керування двигуном постійного струму
Якірне керування
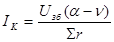
В цьому випадку (рис. 13.5, а)
 , (13.1)
, (13.1)
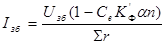
А для двигунів з постійними магнітами (рис. 13.5, в)
 , (13.2)
, (13.2)
де UN- номінальна напруга якоря.
При Uк =0 буде Ік=0, М=0. Тому самохід принципово відсутній. Зміною Uк регулюється швидкість обертання.
Одержимо аналітичні вирази для механічної та регулювальної характеристик.
Оскільки магнітний ланцюг машини не насичений, при Uзб=const:
 . (13.3)
. (13.3)
Момент дорівнює
 , (13.4)
, (13.4)
Де струм керування
 . (13.5)
. (13.5)
Тоді
 . (13.6)
. (13.6)
Якщо базовою величиною вибрати момент Мк при n=0,  =1, то
=1, то
 (13.7)
(13.7)
 (13.8)
(13.8)
При =1:
 . (13.9)
. (13.9)
При ідеальному холостому ході й =1; Ік=0:
 . (13.10)
. (13.10)
Відносна швидкість обертання:
 . (13.11)
. (13.11)
Відносний момент визначається формулою (13.8.):
 . (13.12)
. (13.12)
Зі співвідношень (13.8), (13.11), (13.12) одержуємо рівняння регулювальної характеристики:
 . (13.13)
. (13.13)
Таким чином, при якірному керуванні обидві основні характеристики, які визначають регулювальні властивості двигуна, лінійні (рис. 13.6.), що є великою перевагою даного способу керування. У двигунів змінного струму навіть у ідеальному випадку лінійною є лише механічна характеристика. Для покращення лінійності характеристик в реальному двигуні доводиться значно збільшувати активний опір ротора і, відповідно, недовикористовувати машину.


а) б)
Рис. 13.6. Механічна (а) та регулювальна (б) характеристики у відносних одиницях при якірному керуванні
При якірному керуванні двигуном постійного струму характеристики лінійні при будь-якому опорі якоря, що суттєво підвищує ККД машини та її використання.
Визначимо потужності, які характеризують роботу двигуна при якірному керуванні.
Потужність, споживана обмоткою керування, дорівнює
 . (13.14)
. (13.14)
З формули (13.1)
 . (13.15)
. (13.15)
Зі співвідношень (13.5) та (13.11)
 . (13.16)
. (13.16)
Підставляючи з (13.15) та (13.16) у (13.14), одержимо
 , (13.17)
, (13.17)
де потужність в режимі короткого замкнення при ν=0, =1:
 . (13.18)
. (13.18)
З формул (13.17), (13.18) відносна потужність дорівнює:
 (13.19)
(13.19)
Отже, pк різко зростає зі збільшенням (рис. 13.7).

Рис. 13.7. Залежність потужності керування від та 
Потужність збудження:
 (13.20)
(13.20)
і не залежить при якірному керуванні від й ν.

Рис. 13.8. Залежність механічної потужності від й ν
Механічна потужність у відносних одиницях (рис. 13.8) з урахуванням (13.13):
 . (13.21)
. (13.21)
Номінальною потужністю виконавчого двигуна вважають максимальну механічну потужність, на яку він розрахований. Досліджуючи (13.21) на максимум, визначаємо:
 ;
;
 . (13.22)
. (13.22)
Оскільки  ~
~  , при малих двигун використовується погано. Тому при якірному керуванні керуючий пристрій повинен бути потужним.
, при малих двигун використовується погано. Тому при якірному керуванні керуючий пристрій повинен бути потужним.
Полюсне керування
При такому керуванні напруга Uк подається на полюсну обмотку, а Uзб – на якірну. Для обмеження струму в якірний ланцюг іноді вводять додатковий опір Rд. При ненасиченому магнітному ланцюзі машини, виходячи з формул (13.1) та (13.5):
 , (13.23)
, (13.23)
 ; (13.24)
; (13.24)
 (13.25)
(13.25)
Тоді:
 . (13.26)
. (13.26)
В режимі короткого замкнення при =1, n=0 момент відповідний формулі (15.7). Тоді у відносних одиницях момент дорівнює
 , (13.27)
, (13.27)
що відповідне механічній характеристиці (рис. 13.9,а).
З формули (13.27) вираз для регулювальної характеристики:
 . (13.28)
. (13.28)
Отже, механічні характеристики лінійні. Регулювальні – нелінійні (рис. 13.9,б). Досліджуючи (13.28) на максимум, одержимо:
 ; (13.29)
; (13.29)
 (13.30)
(13.30)
При деяких значеннях m крива ν() не однозначна, тобто можливо одержати одну й ту ж швидкість ν при двох різних . Стійка частина характеристики знаходиться в межах 0≤ ≤  .
.

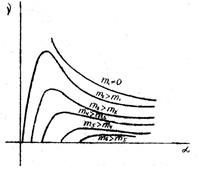
а) б)
Рис. 13.9. Механічні та регулювальні характеристики двигуна при полюсному керуванні
Для того, щоб стійкою була регулювальна характеристика у всьому діапазоні регулювання (від 0 до 1), необхідно, щоб ≥1. Якщо вважати =1, то з (13.29):
m=0,5.
Якщо <0,5, то частина регулювальної характеристики в діапазоні ≤ ≤1 буде не стійкою. Тому полюсне керування застосовують при m≥0,5.
Потужність керування:
 , (13.31)
, (13.31)
Тобто вона пропорційна до і не залежить від ν.
Механічна потужність (рис. 13.10.):
 . (13.32)
. (13.32)
Досліджуючи (13.32) на максимум, одержимо:

 ,
,
тобто при полюсному керуванні pмхmах не залежить від й ν, тому величина не впливає на використання двигуна.

Рис. 13.10. Залежність механічної потужності від ν
При полюсному керування, судячи з формули (13.28), якщо →0, то ν→ ∞. В реальному двигуні ця швидкість обмежена моментом тертя. Але, якщо момент тертя Мтр малий, то двигун може розігнатися до неприпустимих за механічною міцністю швидкостей ν. В цьому разі m створюється за рахунок залишкового магнітного потоку. Тому при полюсному керуванні теоретично можливий самохід.
Недоліком полюсного керування є можливість "пригоряння" щіток та відносно велика потужність збудження.
13.2.3. Імпульсне керування виконавчими двигунами постійного струму [25]
При якірному й полюсному керуванні напруга Uк змінюється за величиною, внаслідок чого змінюється швидкість обертання двигуна. Наприклад, при збільшенні Uк характеристика Uк(t) переміщується угору паралельно до себе (рис. 13.11.).
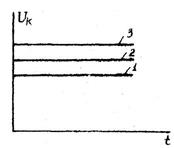
Рис. 13.11. Вертикальне керування напругою
При будь-якому зміненні Uк ця характеристика переміщується у вертикальному напрямі. Тому такий принцип регулювання іноді називають "вертикальним".
Криву Uк(t) можливо уявити як низку імпульсів напруги, які проходять один за одним (рис. 13.12.).
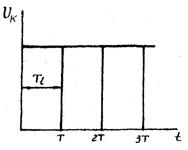
Рис. 13.12. Подання напруги у вигляді послідовності імпульсів
Уявимо, що період цих імпульсів постійний (Т=const). В цьому випадку тривалість імпульсу Ті=Т=const. Якщо зменшити Ті, зберігаючи Т=const, то в межах Т з'явиться пауза (рис. 13.13.)

Рис. 13.13. Імпульсне керування напругою
Тп=Т-Ті (13.33)
Таким чином, напруга буде подаватись на двигун у вигляді послідовності імпульсів. Тому таке регулювання називають "імпульсним". Обертаючий момент двигуна буде пульсувати, а його середнє значення при якірному керуванні за формулою (13.4):
 . (13.34)
. (13.34)
При полюсному керуванні за формулою (15.24):
 . (13.35)
. (13.35)
В обох випадках Ік й  к визначаються середньою напругою, величина якої
к визначаються середньою напругою, величина якої
 , (13.36)
, (13.36)
де відносна тривалість імпульсу (коефіцієнт заповнення періоду імпульсом):
 . (13.37)
. (13.37)
Таким чином, якщо плавно змінювати  , то буде плавно змінюватись Uкср, а отже – й Мср.
, то буде плавно змінюватись Uкср, а отже – й Мср.
Судячи зі співвідношення (13.37), можливі три способи імпульсного керування:
а) широтний (Ті=var, Т=const);
б) частотний (Ті=const, Т=var);
в) імпульсний, або широтно-частотний (Ті=var, Т=var).
Спосіб імпульсивного керування визначається конкретними вимогами до автоматичної системи та двигуна, як до її ланки. Двигун при різних буде мати різні середні усталені швидкості обертання  ср. Графік (t) для випадку Тм≈0 наведено на рис. 13.14.
ср. Графік (t) для випадку Тм≈0 наведено на рис. 13.14.

Рис. 13.14. Часові діаграми напруги, струму та швидкості обертання при імпульсному керуванні двигуном
Таким чином, швидкість обертання пульсує біля деякого середнього значення ср. Еквівалентна схема для якірного імпульсного живлення двигуна однополярними імпульсами наведена на рис. 13.15. Комутатор К може виконуватися або контактним, або напівпровідниковим. Сучасні комутатори виключно напівпровідникові. Діод, шунтуючий якірну обмотку, необхідний для того, щоб під час паузи струм якоря не переривався, щоб створити шлях для розряджання накопиченої в індуктивностях якірного ланцюга електромагнітної енергії. Цим ліквідуються комутаційні перенапруги на якорі й комутаторі і суттєво підвищується ККД системи регулювання. При цьому пульсує й струм. Таким же чином можливо живити й обмотку збудження при імпульсному полюсному керуванні.
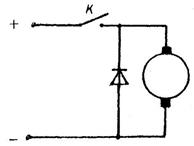
Рис. 13.15. Схема вмикання якоря двигуна при імпульсному керуванні
Розглянутий спосіб імпульсного керування позивають нереверсивним, однополярним, оскільки для реверсу необхідний спеціальний перемикаючий пристрій.
При реверсивному двополярному імпульсному керуванні на якір чи обмотку збудження подаються в межах періоду Т двополярні імпульси (рис. 13.16.)

Рис. 13.16. Часові діаграми струму й напруги навантаження при двополярному імпульсному керуванні
Середня напруга навантаження може бути подана у вигляді двох доданків Uк1ср (визначається тривалістю позитивного імпульсу Т1) та Uк2ср (визначається тривалістю негативного імпульсу Т2):
 . (13.38)
. (13.38)
При нереверсивному керуванні змінюється в межах від 0 до 1. При реверсивному – -1≤ ≤1. Тому у другому випадку на навантаження можлива подача негативної напруги, у зв’язку з чим можливий реверс, рекуперація й режим електромагнітного гальма. Механічні й регулювальні характеристики для нереверсивного якірного керування наведені на рис. 13.17.


а) б)
Рис. 13.17. Механічні (а) та регулювальні (б) характеристики двигуна при однополярному якірному імпульсному керуванні


а) б)
Рис. 13.18. Механічні (а) та регулювальні (б) характеристики двигуна при двополярному якірному імпульсному керуванні
Характеристики аналогічні до тих, які були одержані при звичайному якірному керуванні.Відмінність полягає в тому, що при малих моментах m виникають режими переривчастих струмів, що викликають різкі нелінійностні характеристик ν(m) в області малих m.
Для реверсивного імпульсного якірного керування характеристики наведені на рис. 13.18. Для реверсивного імпульсного полюсного керування характеристики наведені на рис. 13.19.

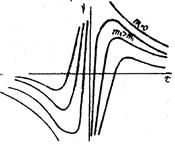
а) б)
Рис. 13.19. Механічні (а) та регулювальні (б) характеристики двигуна при двополярному полюсному імпульсному керуванні
Пульсації струму й швидкості обертання можливо суттєво знизити, зменшуючи період Т, або збільшуючи електромагнітну сталу часу ланцюга навантаження. В останньому випадку в ланцюг навантаження вмикають згладжуючи індуктивності. Але додаткові індуктивності в ланцюзі навантаження знижують динамічні властивості електропривода, підвищуючи його електромагнітну сталу часу. Тому звичайно збільшують частоту комутації.
Не нашли, что искали? Воспользуйтесь поиском: