ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
І-закон регулювання
Рівняння динаміки І-регулятора:
Де Кі= 
Кі- коефіцієнт інтегрування, Ті- постійна часу.
За формою дії І-регулятор схожий на позиційний але позиційний регулятор працює з постійною швидкістю, а І-регулятор переміщує РЧРО з різною швидкістю, величина якої визначається величиною похибки регулювання. Окрім того, позиційний регулятор переміщує РЧРО миттєво, а інтегральній регулятор переміщує РЧРО поступово.
І-регулятор переміщує РЧРО з одного крайнього положення в інше і не може зупинитись в будь-якій іншій точці через відсутність жорсткого зворотного зв'язку.
Фізична суть інтегрування - додавання.
Швидкість зміни регулюючої дії І-регулятора прямо пропорційна величині похибки регулювання (переміщення РЧРО пропорційне інтегралу від вхідної величини, тобто сумі усіх похибок, які були в об'єкті на протязі всього регулювання).
Параметрами настройки є:
Передаточний коефіцієнт регулятора (коефіцієнт інтегрування Кі= ).
Час інтегрування (Ті) ‑ час, за який РЧРО переміститься з одного крайнього положення в інше. Це основний параметр налагодження І-регулятора.
Час інтегрування характеризує швидкість переміщення РЧРО. При зменшенні часу інтегрування зменшується час ПП, але запас стійкості знижується. Якщо час інтегрування збільшується, то знижується швидкодія.
Інтегральне регулювання характеризується гнучким зв'язком.
І відсутністю статичної похибки.
І-регулятор забезпечує максимально високу точність регулювання. Але найменша похибка в об'єкті призводить до початку нового перехідного процесу в об'єкті. І-регулятор зменшує стійкість САР.
Категорично забороняється підключати І-регулятори до астатичних об'єктів.
І-регулятор характеризуються відносно невисокою швидкістю у порівнянні з П-регулятором.
Системи з інтегральним регулятором практично не мають сталого режиму.
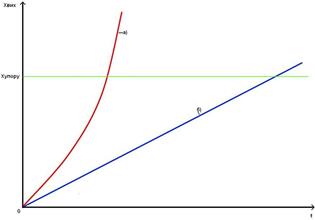
Рис.4 Графік дії І - регулятора при появі сигналу розузгодження
а) реального
б) ідеального
Не нашли, что искали? Воспользуйтесь поиском: