ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
Д — закон регулювання*.
(регулювання з упередженням)
Рівняння динаміки Д-блоку:

Кд – коефіцієнт диференціювання(або Кд*Тд, де Тд – час диференціювання)
* Д-регуляторів не існує, так-як він не вимірює саму похибку, а реагує лише на швидкість її зміни.
Швидкість спрацювання Д-блоку вища за швидкість спрацювання П-регулятора.
Під дією Д-блоку РЧРО переміщується на величину, пропорційну швидкості зміни похибки регулювання в об'єкті, тобто дія Д-блоку зовсім не залежить від величини помилки регулювання, а лише від швидкості її зміни.
Тобто, Д-блок переміщує РЧРО з деяким випередженням наростання помилки, вводячи випереджаючий вплив на об’єкт,
Д-блок зменшує перегулювання та максимальне значення динамічної помилки; зменшує інерційність усієї системи в цілому, збільшуючи її швидкодію; зменшує коливальність ПП.
По мірі компенсації збурюючої дії, швидкість зміни параметра зменшується. Одночасно зменшується і дія Д-блоку на об'єкт. В сталому режимі, коли швидкість регулювання дорівнює нулю, незалежно від того, яка величина помилки, Д-блок вимикається. В цьому головний недолік блоку.
Д-блок використовується лише як допоміжний пристрій для введення сигналу за похідною регульованої координати, так званого форсуючого сигналу, який діє лише на початку перехідного процесу
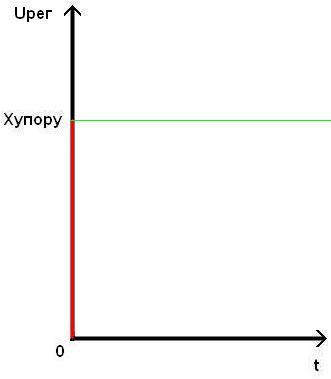
Рис.5. Графік дії Д-блоку при появі сигналу розузгодження
Параметром настройки є:
Тд – час упередження (визначає інерційність Д-блоку)
ПІ-регулювання
Рівняння динаміки ПІ регулятора:

де Кінрег =  .
.
ПІ-регулятор представляє собою паралельне підключення П- та І-складових.

ПІ-регулятор розпочинає роботу так само швидко, як П - регулятор, але час перехідного процесу буде більшим, ніж в системі з П - регулятором через дію І-складової, яка усуває статичну похибку.
Сигнал розузгодження одночасно поступає на обидва блоки. Але спочатку спрацьовує П-складова так-як швидкість її спрацювання вища за швидкість спрацювання І-складової. Вона стрибкоподібно переміщує РЧРО з положення Хпоч в положення Х1 зі швидкістю, пропорційною швидкості збільшення помилки регулювання. Потім спрацьовує І-складова, яка повільно переміщує РЧРО з положення Х1 в положення Х2 усуваючи статичну похибку,що залишилась після роботи П-складової.

Рис.6. Графік дії ПІ регулятора при появі сигналу розузгодження
Параметри настройки ПІ-регулятора:
Крег - передаточний коефіцієнт регулятора;
Ті – час інтегрування (який відповідає часу удвоєння П-складової).
ПД-регулювання
Рівняння динаміки ПД регулятора:

Являє - собою паралельне підключення П – складової та Д - блоку.

Сигнал розузгодження одночасно поступає обидва блоки. Але спочатку спрацьовує Д-блок, так-як швидкість спрацювання Д-блоку вища за швидкість спрацювання П-складової. Він повністю відкриває РЧРО, подаючи в об'єкт максимально можливий регулюючий вплив із метою усунення очікуваного відхилення параметра від заданого значення. По мірі зменшення швидкості зміни параметра зменшується дія Д-блоку. Після Д-блоку спрацьовує П-складова. Вона переміщує РЧРО з швидкістю, пропорційною швидкості збільшення похибки регулювання.

Рис.7. Графік дії ПД регулятора при появі сигналу розузгодження
Параметри настройки ПД-регулятора:
Крег - передаточний коефіцієнт регулятора
Тдр – час диференціювання.
Не нашли, что искали? Воспользуйтесь поиском: